„Sollen wir MEMS oder FOG nehmen?“ – Diese Frage höre ich am häufigsten, und das nicht, weil die Leute die technischen Daten nicht kennen. Unklar ist vielmehr, was in der Praxis wirklich zählt: Drift, Stoßfestigkeit oder einfach nur das Budget? Und allzu oft führt die falsche Entscheidung nicht sofort zum Scheitern – sie verläuft schleichend, bis es zu spät ist, etwas zu ändern.
MEMS-IMUs sind kleiner, leichter und kostengünstiger und eignen sich daher ideal für Systeme mit begrenztem Platz- und Energiebedarf. FOG-IMUs hingegen bieten eine deutlich bessere Bias-Stabilität, geringere Drift und überlegene Leistung in rauen Umgebungen oder Umgebungen ohne GNSS-Empfang.
Die Vor- und Nachteile sind nicht offensichtlich – lasst uns durchgehen, was wirklich zählt.
Inhaltsverzeichnis
Wie funktionieren MEMS- und FOG-Gyroskope?
MEMS-Gyroskope messen Bewegungen, indem sie kleinste Verschiebungen einer vibrierenden Siliziumstruktur erfassen – ähnlich wie die Schwingung einer Stimmgabel beim Drehen. Sie basieren auf Mikrochips und sind daher kompakt, energieeffizient und kostengünstig.
FOG-Gyroskope hingegen nutzen Licht. Sie senden Laserstrahlen durch eine lange Glasfaserspule. Bei Rotation des Geräts verschieben sich die Strahlen leicht asynchron – ein Phänomen, das als Sagnac-Effekt bekannt ist. Dadurch können FOGs Rotationen mit außergewöhnlicher Genauigkeit, ohne bewegliche Teile und mit extremer Stabilität über die Zeit erfassen.
MEMS vs. FOG: Wie wählt man das richtige System aus?
Die Wahl zwischen MEMS und FOG muss nicht kompliziert sein – indem Sie sich auf einige wenige wichtige Leistungsfaktoren konzentrieren, können Sie schnell die richtige Lösung für Ihre Anwendung finden.
1. Genauigkeit
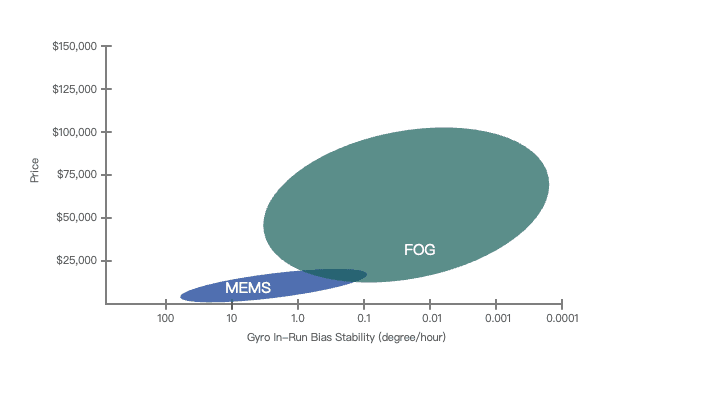
Bei der Bewertung der Genauigkeit sind die wichtigsten Parameter die Stabilität der Abweichung und der Winkel-Random-Walk (ARW) . Nachfolgend finden Sie einen Vergleich der GuideNav-Produkte anhand dieser Schlüsselkennzahlen.
| Parameter | MEMS | NEBEL |
|---|---|---|
| Bias-Stabilität (°/h) | 0.05 ~ 3 | 0.003 ~ 0.5 |
| Winkel-Zufallsschritt (°/√h) | 0.05 ~ 0.45 | 0.0002 ~ 0.02 |
2. Größe und Gewicht
MEMS sind kompakt und leicht und eignen sich daher für Systeme mit begrenztem Platzangebot, während FOG größer und schwerer sind und sich für High-End- oder feste Plattformen eignen.
3. Stromverbrauch
MEMS verbrauchen typischerweise weniger als 1 W und eignen sich daher ideal für batteriebetriebene und mobile Plattformen. Im Gegensatz dazu können FOG-Systeme aufgrund ihrer laserbasierten Optik über 10 W benötigen und erfordern häufig ein zusätzliches Wärmemanagement – dies geht aus Vergleichsdaten des GuideNav-Produktportfolios hervor.
4. Langzeitstabilität
Geschlossene FOG-Systeme bieten eine überlegene Langzeitpräzision und Umweltbeständigkeit, während MEMS trotz Fortschritten bei den Kompensationstechniken in Bezug auf die dauerhafte Stabilität noch hinterherhinken.
5. Kosten
MEMS sind kostengünstig und eignen sich für Anwendungen mit hohem Volumen, während FOG wesentlich teurer sind und sich an anspruchsvolle Märkte mit hohen Präzisionsanforderungen richten.
Nachdem die wichtigsten Unterschiede hinsichtlich Genauigkeit, Bauform, Energieeffizienz, Langzeitstabilität und Kosten erläutert wurden, wird in der folgenden Tabelle ein umfassender direkter Vergleich präsentiert, um eine fundiertere Bewertung zu ermöglichen.
| Besonderheit | MEMS IMU | Nebel-IMU |
|---|---|---|
| Technologie | Siliziumbasierte mikromechanische Sensoren | Optische Gyroskope mit Faserspulen und Lichtinterferenz |
| Größe und Formfaktor | Sehr kompakt, geeignet für platzsparende Designs | Sperrigere Bauform aufgrund der Faserverlegung und Optik |
| Genauigkeit | Mittlere Genauigkeit für den allgemeinen Gebrauch | Hohe Präzision, geeignet für kritische Systeme |
| Kosten | Kostengünstig, ideal für die Massenproduktion | Deutlich höhere Kosten aufgrund der Komplexität |
| Stromverbrauch | Hocheffizient bei minimalem Stromverbrauch | Verbraucht mehr Strom, typischerweise für High-End-Anwendungen |
| Typische Anwendungen | Drohnen, Wearables, Automobilindustrie, Konsumgeräte | Verteidigung, Luft- und Raumfahrt, Schifffahrt, High-End-Industrie |
| Funktionsprinzip | Erkennt Bewegungen mittels vibrierender Massenstrukturen | Nutzt den Sagnac-Effekt zur Messung der Winkelgeschwindigkeit |
| Umweltstabilität | Mit der Zeit empfindlich gegenüber Hitze und Vibrationen | Hohe Beständigkeit gegenüber thermischer Drift und mechanischer Beanspruchung |
| Präzisionsniveau | Ausreichend für kurzfristige oder unterstützte Navigation | Behält die Richtung unterhalb des Grades über längere Zeiträume bei |
| Reaktionsfähigkeit | Schnell und reaktionsschnell in dynamischen Systemen | Stabiles Ansprechverhalten; etwas langsamer als bei MEMS |
| Haltbarkeit | Widerstandsfähig, aber unter extremen Bedingungen weniger stabil | Konzipiert für extreme, missionskritische Umgebungen |
| Integrationsbemühungen | Einfache Integration mit den meisten Plattformen | Erfordert sorgfältige Einrichtung und Systemausrichtung |
Kann die Genauigkeit von MEMS die von FOG übertreffen?
Aus Expertensicht ist FOG nach wie vor führend in puncto Genauigkeit – insbesondere hinsichtlich Bias-Stabilität und geringem Rauschen . Daher bleibt es die erste Wahl für hochpräzise Navigation .
Doch die MEMS-Technologie holt schnell auf . Moderne taktische MEMS-Gyroskope erreichen folgende Leistungsbereiche:
- Bias-Instabilität bis zu 05°/h
- Zufallsbewegung des Winkels um 01°/√h
Damit rücken sie in die Nähe von Einsteiger-FOGs , allerdings in einer kleineren, leichteren und wesentlich günstigeren Bauform.
Während FOGs der Spitzenklasse MEMS in ultrapräzisen und lang andauernden Anwendungsfällen immer noch überlegen sind, moderne MEMS mittlerweile genau genug für viele anspruchsvolle Anwendungen – insbesondere wenn Größe, Gewicht, Leistung und Kosten eine Rolle spielen.

Was sind die realen Anwendungsfälle für MEMS- und FOG-IMUs?
Die Wahl zwischen MEMS und FOG hängt letztendlich davon ab, welchen Belastungen das System standhalten muss und wie viel Fehler es im Laufe der Zeit tolerieren kann. Im Folgenden finden Sie eine Übersicht darüber, wo die einzelnen Technologien in realen Anwendungen zum Einsatz kommen:
Anwendungsfälle für MEMS-IMU
MEMS-IMUs sind für Anwendungen optimiert, bei denen Größe, Gewicht, Stromverbrauch und Kosteneffizienz Vorrang vor ultrahoher Präzision haben.
- Unbemannte Luftfahrzeuge (UAVs) –
Ideal für kleine und mittelgroße Drohnen, die zur Korrektur auf GNSS angewiesen sind. - Konsum- und Industrierobotik:
Einsatzgebiete sind Bewegungserfassung, Gleichgewichtskontrolle und Orientierungsrückmeldung. - Fahrzeugsysteme (ADAS, Koppelnavigation, Stabilisierung)
Bei Fusion mit GNSS oder Radencodern - Tragbare und handliche Geräte:
Bewegungserkennung in kompakten, batteriebetriebenen Geräten
MEMS-Systeme eignen sich gut für Systeme, in denen eine externe Korrektur möglich ist und eine akzeptable Drifttoleranz besteht.
Anwendungsfälle der Nebel-IMU
FOG-IMUs werden dort eingesetzt, wo die Trägheitsgenauigkeit auch unter Belastung, Isolation oder über längere Zeiträume hinweg unbedingt erhalten bleiben muss .
- Verteidigungs- und Militärplattformen:
Taktische Navigation, Fahrzeugstabilisierung, Raketen- und Turmlenkung - Marine- und Unterwassersysteme:
Langstreckenschiffe, ROVs und Trägheitsnavigation bei GNSS-Ausfall - Anwendungen in der Raumfahrt:
Startplattformen, Satelliten und Lageregelung von Raumfahrzeugen - Vermessungs- und Präzisionsbohranwendungen
, die eine Kurskorrektur im Sub-Grad-Bereich über die Zeit ohne Rückstellung erfordern.
FOG ermöglicht die Aufrechterhaltung des Einsatzes, wenn MEMS über akzeptable Schwellenwerte hinaus driften würden.
GuideNav bietet ein umfassendes Portfolio an MEMS- und FOG-IMUs, die auf die vielfältigen Anforderungen kommerzieller, industrieller und militärischer Anwendungen zugeschnitten sind. Ob es auf Größe und Effizienz oder auf langfristige Trägheitsgenauigkeit ankommt – wir bieten für jeden Leistungsbereich die passende Lösung.

Wie viel teurer ist FOG im Vergleich zu MEMS?
FOG-basierte IMUs sind im Allgemeinen 8- bis 10-mal teurer als MEMS-basierte Einheiten. Diese Preisdifferenz ist auf Folgendes zurückzuführen:
- Hochpreisige Komponenten wie Faserspulen und interferometrische Optiken
- Präzisionsmontage mit engen Toleranzen und Kalibrierung
- Kleinserienfertigung, im Gegensatz zu MEMS, die von der Massenfertigung profitieren
Im Gegensatz dazu nutzen MEMS-IMUs kostengünstige Siliziumprozesse und sind leichter skalierbar, was zu Preisen führt, die oft weniger als ein Zehntel derer von FOG-Systemen betragen.
Wie entscheide ich, ob ich Mems oder Fog für mein Projekt benötige?
Das hängt von Ihrer Anwendung, der erforderlichen Genauigkeit und den Umgebungsbedingungen ab. GuideNav bietet sowohl MEMS- als auch FOG-basierte IMUs und INS-Systeme an – von kompakten, kostengünstigen Geräten bis hin zu hochpräzisen taktischen Lösungen.
Um herauszufinden, welche Sensortechnologie am besten zu Ihrem Projekt passt, empfehlen wir Ihnen, die folgenden Faktoren zu berücksichtigen:
- Bewerbungsdetails.
- Wichtigste Leistungsanforderungen: (z. B. Zielabweichungsstabilität, Dynamikbereich, Umgebungsbedingungen usw.)
Noch unsicher? Teilen Sie uns Ihre Spezifikationen mit – wir empfehlen Ihnen das optimale Produkt für Ihr System.
