In Teil 1 haben wir erläutert, was ARW ist und warum es die Zuverlässigkeit jedes IMU-basierten Systems maßgeblich beeinflusst. Das Verständnis von ARW ist jedoch nur dann von Nutzen, wenn man es bei der Entwicklung berücksichtigen kann. Dieser zweite Teil konzentriert sich daher auf die praktische Anwendung: Wie wirkt sich ARW auf die Navigation realer UAVs aus, was Software leisten kann und was nicht, und wie ich Sensoren bewerte, wenn ein Ausfall inakzeptabel ist.
Angle Random Walk (ARW) setzt der Genauigkeit von IMUs die ultimative Grenze . Es kann nicht durch Software beseitigt, sondern nur durch die Auswahl rauscharmer Sensoren, ein stabiles thermisches Design, Schwingungsisolierung und effektive Multisensorfusionsstrategien reduziert werden.
Deshalb werde ich Ihnen in diesem Abschnitt erläutern, wie ARW bei realen UAV-Einsätzen auftritt, warum Software allein es nicht aufheben kann und welche praktischen Designentscheidungen – Sensorauswahl, Wärmemanagement, mechanische Isolation und Fusion – den Unterschied zwischen Erfolg und Misserfolg der Mission ausmachen können.
Inhaltsverzeichnis
Wie beeinflusst ARW die UAV-Navigation?
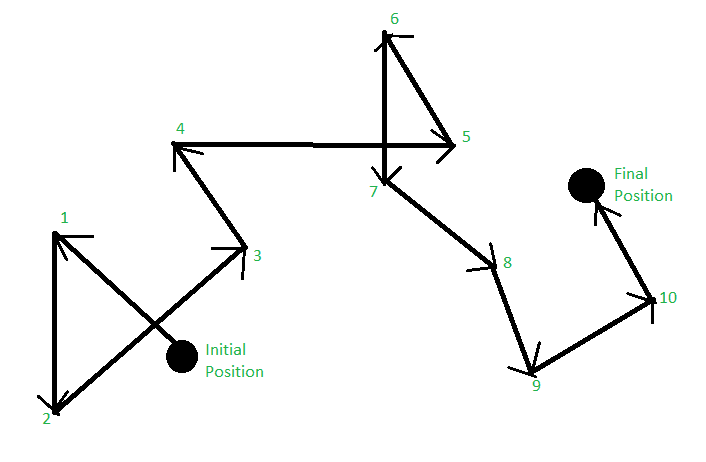
Stellen Sie sich Folgendes vor: Sie fliegen eine Starrflügeldrohne durch eine Schlucht ohne GNSS-Signal. Der Autopilot verlässt sich vollständig auf Ihre IMU, um die Fluglage zu halten und die Flugbahn zu stabilisieren. Die ersten Minuten läuft alles reibungslos. Doch dann beginnt die Orientierung zu driften – erst langsam, dann immer schneller. Die Drohne gerät ins Trudeln, die Höhenhaltung lässt nach, und Sie haben die Orientierung verloren. Was ist passiert?
Das ist ARW in Aktion. Selbst ohne Bewegung, ohne thermische Gradienten und ohne Vibrationen beeinträchtigt das integrierte Winkelrauschen unbemerkt Ihr Vertrauen in Nick-, Roll- und Kursstabilität . Sobald die durch ARW verursachte Drift die Schwellenwerte Ihrer Flugsteuerung überschreitet, kann auch die beste PID-Regleroptimierung oder Glättung das System nicht mehr retten.
Bei meinen eigenen UAV-Konstruktionen betrachte ich ARW als Navigationszeitbudget . Ein MEMS-Gyroskop mit 0,2°/√h bietet in einem GNSS-freien Gebiet etwa 10–15 Minuten nutzbare Stabilität. Ein taktisches MEMS mit 0,05°/√h verlängert dieses Zeitfenster. FOG verschafft Ihnen Stunden. Der Unterschied liegt nicht nur in der Leistung – er entscheidet darüber, ob die Mission überhaupt durchgeführt werden kann .
Kann ARW in Software kompensiert werden?
Das ist die Falle, die ich viel zu oft sehe: Ein Team stößt auf Orientierungsdrift und nimmt an, sie ließe sich per Firmware beheben. Sie fügen weitere Filter hinzu, erhöhen die Kalman-Verstärkung oder stapeln Sensorfusionsschichten – doch die Drift bleibt bestehen . Denn was sie bekämpfen, ist kein Programmierfehler oder eine Fehlkonfiguration der Fusion – es sind physikalische Gesetze.
ARW ist weder eine systematische Abweichung noch ein Offset – es ist unvermeidbares Rauschen. Es stabilisiert sich nicht mit der Zeit und mittelt sich nicht wie eine langsame thermische Drift aus. Es liegt jedem Gyro-Ausgangssignal zugrunde und führt ab dem zweiten Gyro zu Unsicherheiten in der Integration.
Ja, Fusion hilft. GNSS-Aktualisierungen können Kursabweichungen korrigieren. Bildverarbeitungssysteme oder LiDAR können die Position fixieren. Fallen diese jedoch aus – beispielsweise in einem Tunnel oder bei Störungen –, greift das System auf die Rohdaten der IMU zurück , und in diesem Moment wird ARW zum Countdown-Timer. Ist das intrinsische Rauschen des Sensors zu hoch, hilft auch kein Software-Trick mehr.
Ich sage den Teams: Man kann die Auswirkungen von ARW filtern, aber nicht vollständig beseitigen. Wenn Ihre Plattform länger als ein paar Minuten ohne externe Korrektur fliegen, zielen oder stabilisieren muss, wählen Sie Ihr Gyroskop entsprechend – oder planen Sie einen Ausfall ein.
Wie können Ingenieure den ARW-Wert bei der Systementwicklung minimieren?
ARW lässt sich nicht eliminieren – aber man kann es intelligent berücksichtigen . Jedes System, das ich mit zuverlässiger Trägheitsleistung entwickelt habe, begann mit dieser Frage: „Wie niedrig muss mein ARW sein und wie erreiche ich das am besten?“ So gehe ich dabei vor:
- Die Sensorauswahl steht an erster Stelle. Bei begrenztem ARW-Budget nützt auch kein Algorithmus mehr, wenn es sich um ein billiges MEMS-Gyroskop handelt. Beginnen Sie mit dem Bauteil mit dem niedrigsten ARW-Wert, das Ihren Anforderungen an Volumen, Stromverbrauch und Budget entspricht. Erfahrungsgemäß bestimmt diese Entscheidung allein 80 % der Qualität des nachfolgenden Systems.
- Thermische Stabilität ist wichtiger als allgemein angenommen. Selbst ein hochwertiges Gyroskop kann mit steigender Temperatur ein erhöhtes Rauschen aufweisen. Ich habe schon erlebt, dass sich die ARW-Werte bei mangelhafter Wärmeisolierung verdoppelt haben. Eine stabile thermische Masse oder eine moderate aktive Regelung machen hier einen deutlichen Unterschied.
- Mechanische Entkopplung reduziert das effektive Rauschen. Vibrationen führen dem Signalweg des Sensors breitbandige Energie zu, die teilweise als Winkelbewegung interpretiert wird. Weiche Lager oder abgestimmte Isolatoren senken zwar nicht das ARW selbst, aber sie reduzieren das, was das System als ARW wahrnimmt
- Sensorfusion erweitert Ihren Zeithorizont. GNSS, Magnetometer, Barometer, visuelle Odometrie – sie alle sind hilfreich, aber nur, wenn ihre eigene Unsicherheit gut beherrscht wird. Ich betrachte Fusion nicht als Ausbesserung für fehlerhafte IMUs, sondern als Multiplikator für gute.
Die entscheidende Erkenntnis? ARW definiert die Basis. Alles Weitere baut darauf auf. Wenn Ihr Sensor im Kern verrauscht ist, erbt jede darüber liegende Schicht – Filter, Schätzer, Fusion – diese Unsicherheit.
Worauf sollten Sie bei einer ARW-sensitiven Anwendung achten?
Bei der Auswahl einer IMU für eine missionskritische Plattform geht es nicht nur um Spezifikationen, sondern auch um die Festlegung einer Ausfallzeit. Die ARW (Average Readiness) gibt an, wie lange Ihr System ohne externe Korrektur fliegen, steuern, zielen oder stabilisieren kann, bevor Unsicherheiten auftreten. Deshalb betrachte ich die ARW als die entscheidende Variable bei der IMU-Auswahl.
So formuliere ich es:
- Wenn Ihr GNSS-Ausfallfenster unter 5 Minuten liegt und Sie nur eine grobe Orientierung benötigen, könnten industrielle MEMS (0,1–0,5°/√h) geeignet sein. Rechnen Sie jedoch damit, dass Ihr Filter die Drift permanent kompensieren muss.
- Muss Ihre Plattform 10–20 Minuten lang stabil bleiben , wie beispielsweise bei ISR-Drohnen oder fahrzeugmontierter Optik, sind taktische MEMS mit ARW im Bereich von 0,05°/√h der Mindestansatzpunkt. Ich verwende hier ausnahmslos keine Sensoren für Endverbraucher.
- Wenn Sie stundengenaue Zuverlässigkeit benötigen – etwa für die Schifffahrt, Eisenbahnsysteme oder luftgestützte Waffensysteme –, ist FOG (Focused Open Ground) unerlässlich. Sie benötigen eine ARW (Air Response Weight) unter 0,01°/√h und, noch wichtiger, die Zuverlässigkeit und Umweltverträglichkeit, die die FOG-Architektur bietet.
Bei jeder Designprüfung frage ich: „Was passiert, wenn die externen Referenzen ausfallen?“ Lautet die Antwort „Die Leistung verschlechtert sich langsam und vorhersehbar“, dann erfüllt ARW seinen Zweck. Lautet die Antwort hingegen „Wir verlieren innerhalb von drei Minuten die Verbindung“, dann haben Sie die falsche IMU gewählt.
ARW als Maßstab für die Auswahl der richtigen IMU
Angle Random Walk (ARW) ist nicht nur eine Zahl im Datenblatt – es ist der Maßstab, der darüber entscheidet, ob ein IMU in missionskritischen Anwendungen zuverlässig ist. Ingenieure in den Bereichen Verteidigung, Luft- und Raumfahrt sowie Schifffahrt wissen, dass ein niedriger ARW-Wert den Unterschied ausmacht zwischen Systemen, die innerhalb von Minuten abdriften, und Systemen, die über Stunden oder sogar Tage stabil bleiben.
Bei GuideNav konzentrieren wir uns genau auf diesen Maßstab. Unsere IMUs und FOG-basierten Navigationssysteme zeichnen sich durch branchenführende ARW-Leistung aus und gewährleisten höchste Genauigkeit in GNSS-freien Umgebungen, bei Langstrecken-UAVs und auf Präzisionsstabilisierungsplattformen. Ob Sie die kompakte Effizienz taktischer MEMS oder die absolute Stabilität von Navigations-FOG benötigen – GuideNav bietet Lösungen, die auf die Anforderungen erfolgreicher Missionen zugeschnitten sind.
