Inhaltsverzeichnis
- Was ist eine IMU?
- Komponenten einer Inertialmesseinheit
- Wie funktioniert eine Inertialmesseinheit?
- Autonome und selbstfahrende Fahrzeuge
- Luft- und Raumfahrt
- Robotik
- Virtuelle Realität (VR) und Erweiterte Realität (AR)
- Medizinprodukte
- Sportanalyse und Bewegungserfassung
- Unterhaltungselektronik
- MEMS-IMU vs. FOG-IMU: Wichtigste Unterschiede
- MEMS-IMU: Überblick und Eigenschaften
- FOG IMU: Überblick und Eigenschaften
- IMU-Leistungsindikatoren
- IMU-Kalibrierungsmethoden
- Vorteile von Inertialmessgeräten
- Grenzen von Inertialmessgeräten
- IMU vs AHRS (Lage- und Kursreferenzsystem)
- IMU vs INS (Inertialnavigationssystem)
- Verschiedene IMU-Typen und ihr Marktüberblick
- Zukunftstrends und Entwicklung von Inertialmessgeräten
Einleitung
Inertialmesseinheiten (IMUs) sind in modernen Hightech-Branchen wie autonomen Fahrzeugen, Robotik und Luft- und Raumfahrt unverzichtbar. Trotz ihrer weitverbreiteten Anwendung fällt es vielen jedoch schwer, die Funktionsweise und das Potenzial von IMUs vollständig zu verstehen. Ohne dieses Verständnis besteht die Gefahr von Ineffizienzen und Fehlern in der Systemleistung. In diesem Artikel beleuchten wir die Grundlagen von IMUs, ihre Anwendungen und zukünftige Trends, damit Sie diese Technologie optimal nutzen können.
Eine Inertialmesseinheit (IMU) ist ein Gerät, das Beschleunigung, Winkelgeschwindigkeit und mitunter Magnetfelder misst, um die Ausrichtung und Position eines Objekts zu bestimmen. IMUs sind unverzichtbar für Navigation, Steuerungssysteme und Bewegungserfassung. Durch die Kombination von Sensordaten ermöglichen IMUs die präzise Erfassung von Bewegung und Ausrichtung in Umgebungen, in denen GPS-Signale schwach oder nicht verfügbar sind.
Die Zukunft von IMUs ist vielversprechend, denn Trends wie Sensorfusion und KI-Integration eröffnen neue Möglichkeiten. Tauchen wir ein in die Funktionsweise dieser Systeme und ihre zukünftige Rolle in Spitzentechnologien.
Grundlagen der Inertialmesseinheit (IMU)
Komponenten einer Inertialmesseinheit
Eine IMU umfasst typischerweise die folgenden Schlüsselsensoren. Schauen wir uns diese im Detail an und betrachten wir, wie jeder einzelne zur Gesamtfunktionalität beiträgt:
| Komponente | Funktion | Ausgabe |
|---|---|---|
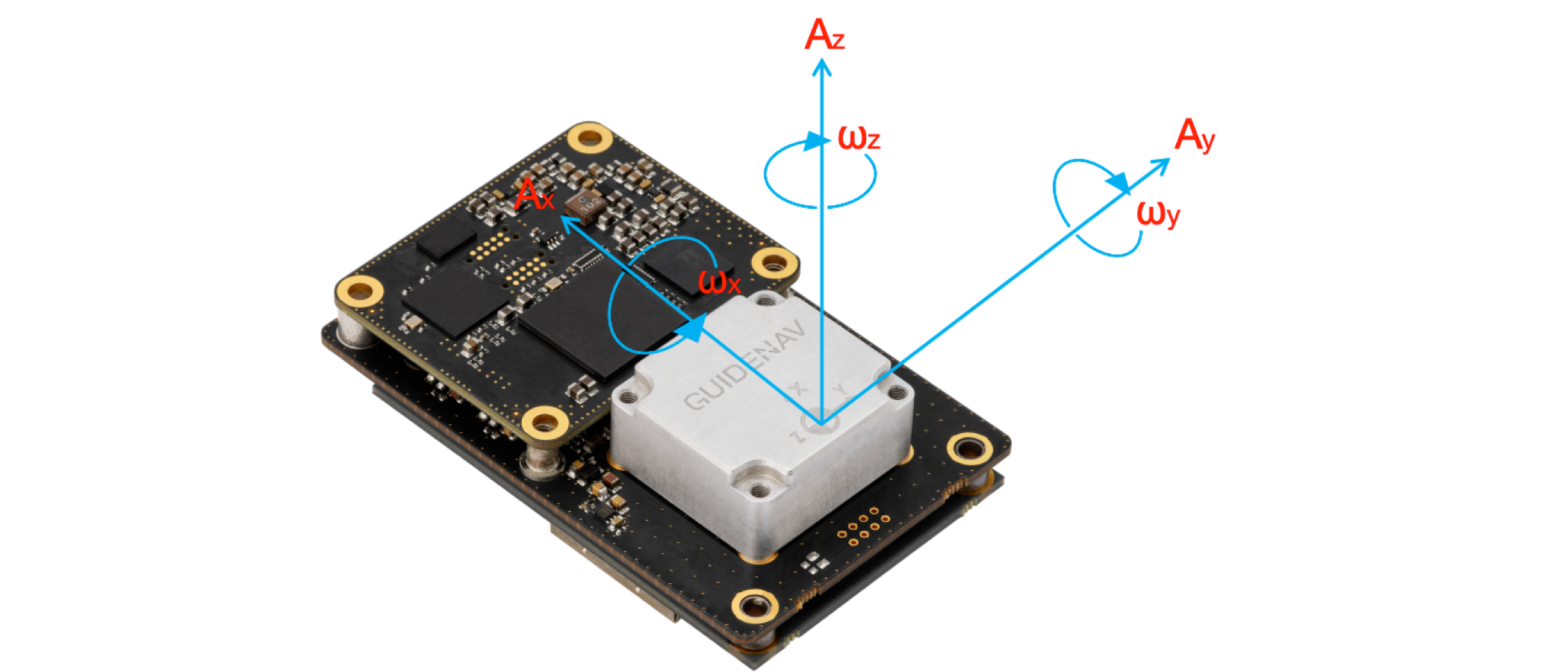
| Beschleunigungsmesser | Misst die lineare Beschleunigung entlang der X-, Y- und Z-Achse. | Liefert Daten zu Geschwindigkeit und Verschiebung. |
| Gyroskop | Misst die Winkelgeschwindigkeit (Rotationsrate) um die X-, Y- und Z-Achse. | Liefert Daten zur Orientierung (Einstellung). |
| Magnetometer (optional) | Misst die Stärke und Richtung des Magnetfelds relativ zum Erdmagnetfeld. | Gibt die Richtung (Kompassrichtung) an. |
Jeder dieser Sensoren spielt eine entscheidende Rolle bei der Bereitstellung von Bewegungsdaten in Echtzeit und hilft uns so zu verstehen, wie sich das Objekt im Raum bewegt und dreht.
Wie funktioniert eine Inertialmesseinheit?
So entwickeln wir bei GuideNav IMUs für ein reibungsloses Funktionieren:
- Beschleunigungsmessung : Der Beschleunigungsmesser erfasst Geschwindigkeitsänderungen entlang dreier Achsen. Anhand dieser Daten lässt sich bestimmen, wie schnell das Objekt beschleunigt oder abbremst, was für die Verfolgung der Verschiebung über die Zeit entscheidend ist.
- Winkelgeschwindigkeitsmessung : Das Gyroskop erfasst die Rotation des Objekts um jede der drei Achsen. Durch die Integration dieser Rotationsdaten über die Zeit kann die IMU die genaue Ausrichtung des Objekts im Raum bestimmen.
- Magnetfeldmessung (optional) : Falls vorhanden, misst das Magnetometer das Erdmagnetfeld und liefert eine Kompassrichtung. Dies hilft, Abweichungen in den Gyroskopwerten zu korrigieren und die Genauigkeit der IMU über lange Zeiträume zu gewährleisten.
Bei GuideNav nutzen wir Sensorfusionsalgorithmen , um die Daten dieser Komponenten zu kombinieren. Dadurch erzeugen wir eine hochpräzise Darstellung der Position und Orientierung des Objekts im dreidimensionalen Raum.
Anwendungen von Inertialmesseinheiten (IMUs)
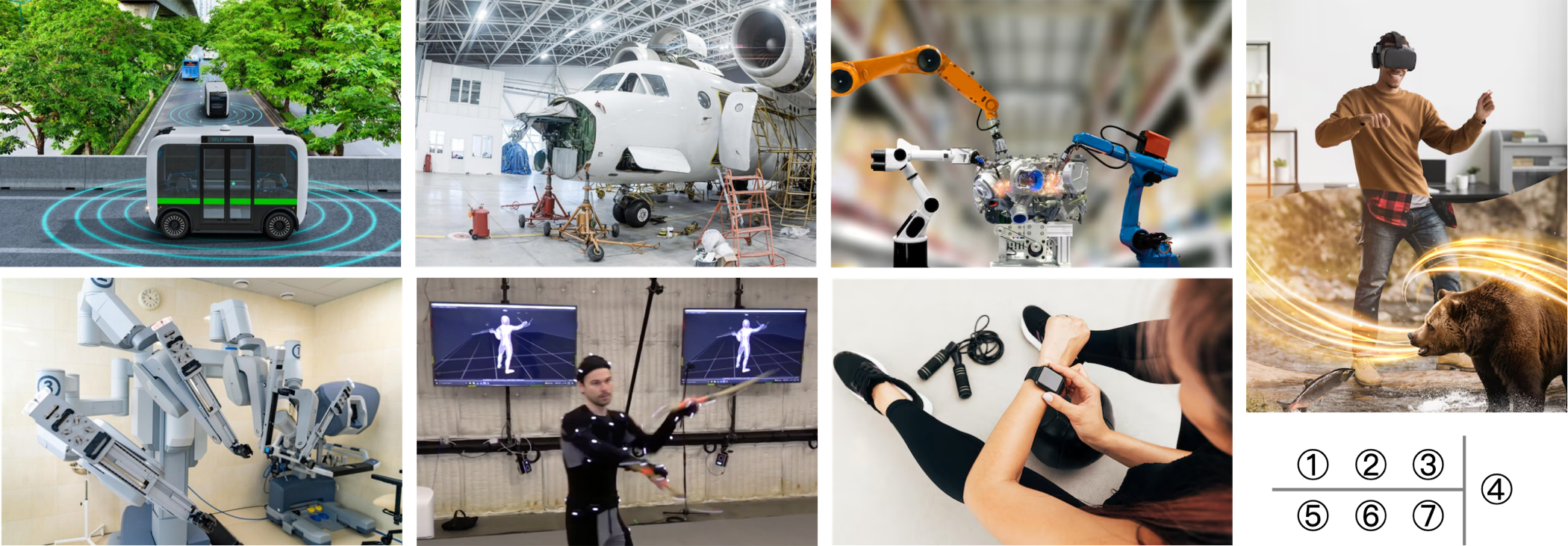
Inertialmesseinheiten (IMUs) finden in einer Vielzahl von Anwendungen Verwendung und liefern wichtige Daten zu Beschleunigung, Winkelgeschwindigkeit und teilweise auch Magnetfeldern. Ihre Präzision und Vielseitigkeit machen sie unverzichtbar in Branchen wie autonomen Fahrzeugen, Luft- und Raumfahrt, Robotik, Virtual Reality, Gesundheitswesen, Sportanalyse und Unterhaltungselektronik. Im Folgenden stellen wir einige der wichtigsten Anwendungsbereiche vor, in denen IMUs unverzichtbar sind.
1. Autonome und selbstfahrende Fahrzeuge
autonomer Fahrzeuge unerlässlich . Sie helfen, die Bewegung und Ausrichtung des Fahrzeugs in Echtzeit zu erfassen und so Stabilität und präzise Navigation zu gewährleisten. Obwohl GPS- Daten zur Positionsbestimmung verwendet werden, IMUs unverzichtbar, wenn GPS-Signale schwach oder nicht verfügbar sind (z. B. in Tunneln, Straßenschluchten oder abgelegenen Gebieten).
| Anwendung | Rolle der IMU |
|---|---|
| Autonome Autos | Liefert Daten zur Fahrzeugausrichtung und -bewegung, um eine stabile Navigation zu ermöglichen. |
| Drohnen | Gewährleistet die präzise Steuerung von Flugbahn und Position. |
| Roboterfahrzeuge | Verfolgt Bewegungen im Gelände oder in Umgebungen ohne GPS-Empfang. |
2. Luft- und Raumfahrt
IMUs sind seit Langem ein unverzichtbarer Bestandteil der Luft- und Raumfahrtindustrie . Sie liefern Echtzeitdaten zur Ausrichtung und Bewegung von Flugzeugen und Raumfahrzeugen. IMUs werden sowohl in der zivilen Luftfahrt als auch der Weltraumforschung und bieten hohe Zuverlässigkeit und Genauigkeit in anspruchsvollen Umgebungen, in denen GPS nicht verfügbar oder praktikabel ist.
| Anwendung | Rolle der IMU |
|---|---|
| Flugzeugnavigation | Liefert Lage- (Orientierungs-) Daten für einen stabilen Flug. |
| Raumschiffnavigation | Gewährleistet präzise Orientierung und Bewegungssteuerung im Raum. |
| Satellitenausrichtung | Hält die Satellitenausrichtung und -flugbahn während des Betriebs aufrecht. |
3. Robotik
In der Robotik werden IMUs zur Überwachung von Bewegung, Orientierung und Gleichgewicht von Robotern eingesetzt, sei es in industriellen, medizinischen oder Konsumanwendungen. IMUs liefern Rückmeldungen an Robotersteuerungssysteme und gewährleisten so eine reibungslose und präzise Bewegung in unterschiedlichsten Umgebungen.
| Anwendung | Rolle der IMU |
|---|---|
| Industrieroboter | Gewährleistet eine stabile Bewegung während der Fertigungsprozesse. |
| Medizinische Roboter | Ermöglicht eine präzise Bewegungssteuerung für Operationen und Rehabilitationsmaßnahmen. |
| Autonome Roboter | Erfasst Position und Orientierung zur Navigation in dynamischen Umgebungen. |
4. Virtuelle Realität (VR) und Erweiterte Realität (AR)
In der Welt der virtuellen Realität (VR) und der erweiterten Realität (AR) sind IMUs Schlüsselkomponenten zur Erfassung der Kopf- und Körperbewegungen der Nutzer. Durch die Messung von Rotation, Beschleunigung und teilweise auch Magnetfeldern liefern IMUs Bewegungsdaten in Echtzeit, die das immersive Erlebnis verbessern.
| Anwendung | Rolle der IMU |
|---|---|
| VR-Headsets | Erfasst Kopfbewegungen, um die virtuelle Umgebung anzupassen. |
| AR-Geräte | Überwacht Handbewegungen zur Interaktion mit virtuellen Objekten. |
| Gestensteuerung | Erkennt Benutzergesten zur Interaktion in AR/VR-Systemen. |
5. Medizinprodukte
IMUs werden zunehmend in medizinische Geräte für verschiedene Zwecke integriert, darunter Bewegungserfassung, Rehabilitation und Diagnostik. Ihre Fähigkeit, präzise Bewegungen zu messen, macht sie unentbehrlich für das Verständnis und die Überwachung des Patientenfortschritts.
| Anwendung | Rolle der IMU |
|---|---|
| Physikalische Rehabilitation | Überwacht die Bewegungen der Patienten während der Therapie, um den Therapiefortschritt zu verfolgen. |
| Tragbare Geräte | Erfasst Bewegungsstörungen, beispielsweise bei Patienten mit Parkinson. |
| Bewegungserfassung für Diagnosezwecke | Misst abnorme Bewegungen zu diagnostischen Zwecken. |
6. Sportanalyse und Bewegungserfassung
IMUs werden in der Sportanalyse und Bewegungserfassung , um die Leistung von Athleten zu überwachen und ihre Bewegungen zu optimieren. Die präzise Bewegungserfassung durch IMUs trägt zur Verletzungsprävention, Leistungsanalyse und -verbesserung bei.
| Anwendung | Rolle der IMU |
|---|---|
| Athletenleistung | Erfasst Bewegungsdaten zur Analyse von Geschwindigkeit, Beschleunigung und Effizienz. |
| Verletzungsprävention | Überwacht Bewegungsabläufe, um Risiken zu erkennen und das Training zu optimieren. |
| Bewegungserfassung | Erfasst menschliche Bewegungen zur Verwendung in Film, Animation und Videospielen. |
7. Unterhaltungselektronik
IMUs sind auch in vielen Unterhaltungselektronikprodukten wie Smartphones, Wearables und Spielecontrollern integriert. Diese Geräte nutzen IMUs zur Bewegungs- und Orientierungserkennung, wodurch verschiedene Funktionen ermöglicht und das Benutzererlebnis verbessert werden.
| Anwendung | Rolle der IMU |
|---|---|
| Smartphones | Ermöglicht Bildschirmdrehung, bewegungsbasierte Steuerung und Aktivitätsverfolgung. |
| Fitness-Tracker | Erfasst Schrittzahl, zurückgelegte Strecke und körperliche Aktivität. |
| Gaming-Controller | Erfasst die Spielerbewegungen für ein immersives Spielerlebnis. |
Typen von Inertialmesseinheiten (IMU): MEMS-IMU vs. FOG-IMU
Inertialmesseinheiten (IMUs) sind in vielen Branchen unverzichtbar, insbesondere in der Verteidigungs- und Luftfahrtindustrie , wo höchste Präzision entscheidend ist. Die beiden Haupttypen von IMUs, MEMS-IMUs (mikroelektromechanische Systeme) und FOG-IMUs (faseroptische Gyroskop-IMUs) , unterscheiden sich deutlich hinsichtlich Leistung, Größe, Kosten und Eignung für verschiedene Anwendungen.
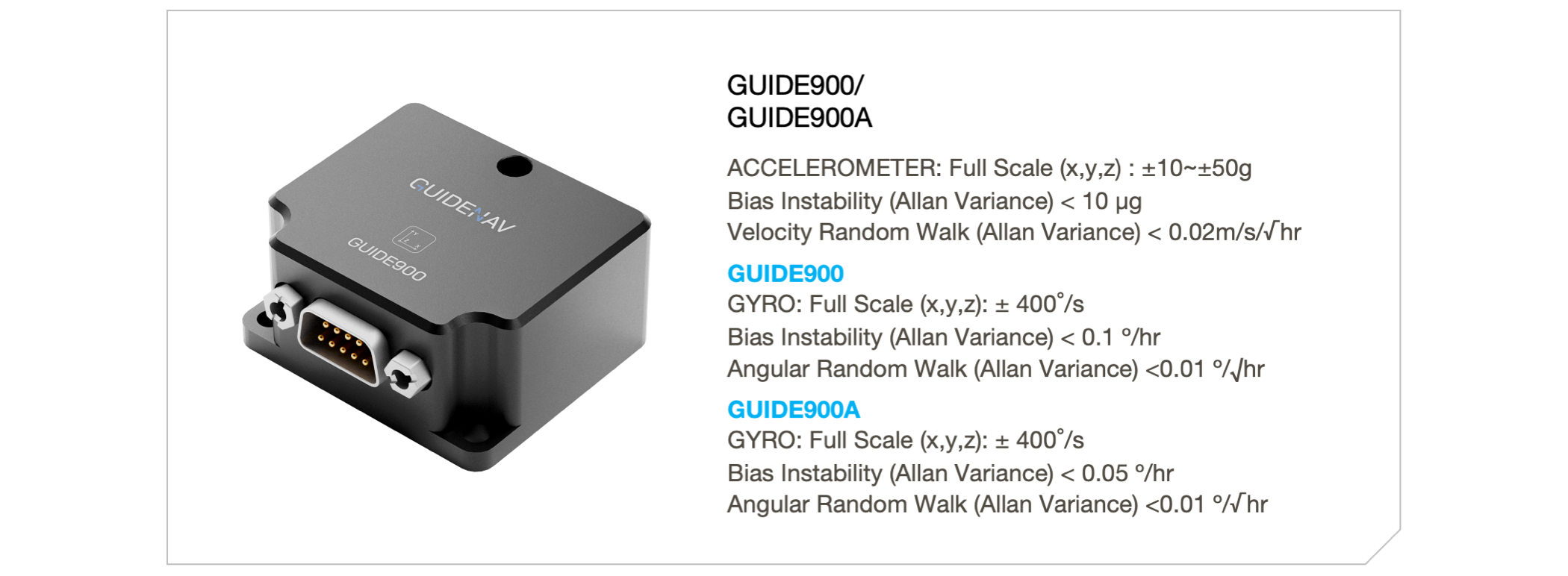
Obwohl FOG-IMUs traditionell in hochpräzisen Bereichen wie Luft- und Raumfahrt, Verteidigung und Robotik eingesetzt wurden, bieten jüngste Fortschritte bei MEMS-IMUs , wie beispielsweise dem GUIDE900 und dem GUIDE900A , nun Präzisionswerte von 0,1°/h bzw. 0,05°/h , die mit denen von Einstiegs- FOG-IMUs . Diese Verbesserung ermöglicht den Einsatz von MEMS-IMUs hochpräzisen Anwendungen FOG-IMUs dominiert wurden .
MEMS-IMU vs. FOG-IMU: Wichtigste Unterschiede
| Parameter | MEMS IMU | Nebel-IMU |
|---|---|---|
| Technologie | Basierend auf mikroelektromechanischen Systemen (MEMS) -Sensoren. | Verwendet faseroptische Gyroskope (FOGs) zur Winkelgeschwindigkeitsmessung. |
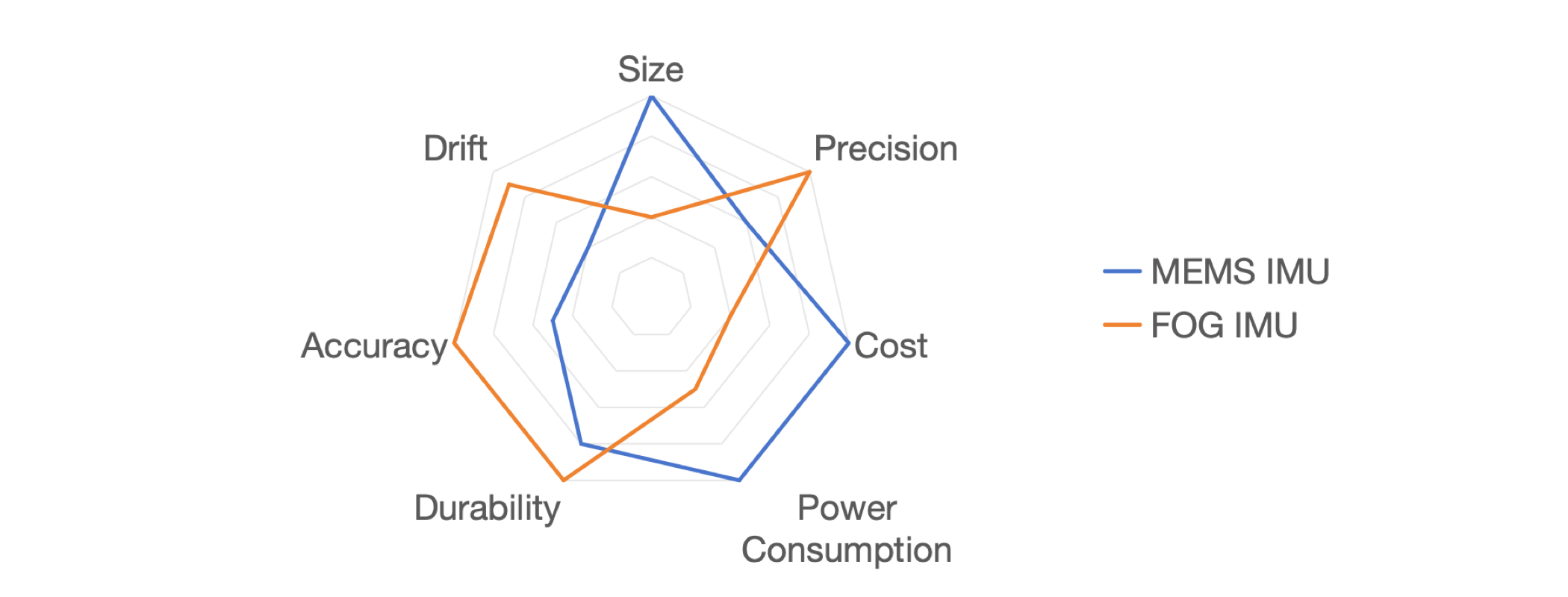
| Größe | Kompakt und leicht , ideal für mobile Geräte. | Größer, robuster, geeignet für Präzisionsanwendungen in großtechnischen Systemen. |
| Präzision | Mäßige Präzision, aber neuere hochpräzise MEMS-IMUs erreichen 0,1°/h oder 0,05°/h . | Extrem hohe Präzision, minimale Abweichung und über die Zeit hinweg stabilere Eigenschaften. |
| Kosten | Niedrige Kosten machen sie ideal für Massenmarktanwendungen. | Höhere Kosten aufgrund fortschrittlicher Technologie, die in High-End-Systemen zum Einsatz kommt. |
| Stromverbrauch | Geringer Stromverbrauch , geeignet für batteriebetriebene Geräte. | Höherer Stromverbrauch, besser geeignet für Systeme mit höherem Energiebudget. |
| Haltbarkeit | Weniger beständig unter extremen Umweltbedingungen. | Sehr robust, geeignet für den Einsatz unter rauen Umgebungsbedingungen. |
| Genauigkeit | Geeignet für Anwendungen mit niedriger bis mittlerer Präzision. | Hohe Genauigkeit, geeignet für hochpräzise Navigation und Stabilität. |
| Anwendungen | Unterhaltungselektronik, Automobilsysteme, Drohnen, UAVs, **militärische Systeme**. | Luft- und Raumfahrt, Verteidigung, Industrierobotik, High-End-Navigationssysteme. |
| Drift | Stärkere Drift im Laufe der Zeit, die eine Neukalibrierung erfordert. | Sehr geringe Drift, ideal für den Langzeitbetrieb ohne Neukalibrierung. |
| Ansprechzeit | Schnellere Reaktionszeit dank geringerer Größe und einfacherem Design. | Die Reaktionszeit ist etwas langsamer, dafür bietet dies aber eine höhere Stabilität über die Zeit. |
MEMS-IMU: Überblick und Eigenschaften
MEMS- Inertialmesseinheiten IMUs nutzen der mikroelektromechanischen Systeme (MEMS) , bei der kleine mechanische Komponenten mit Elektronik auf einem Mikrochip integriert werden. Die Hauptvorteile von MEMS-IMUs sind ihre geringe Größe , die niedrigen Kosten und der geringe Stromverbrauch . Diese Eigenschaften machen MEMS-IMUs ideal für Anwendungen in der Unterhaltungselektronik, in Automobilsystemen und zunehmend auch militärischen Bereich
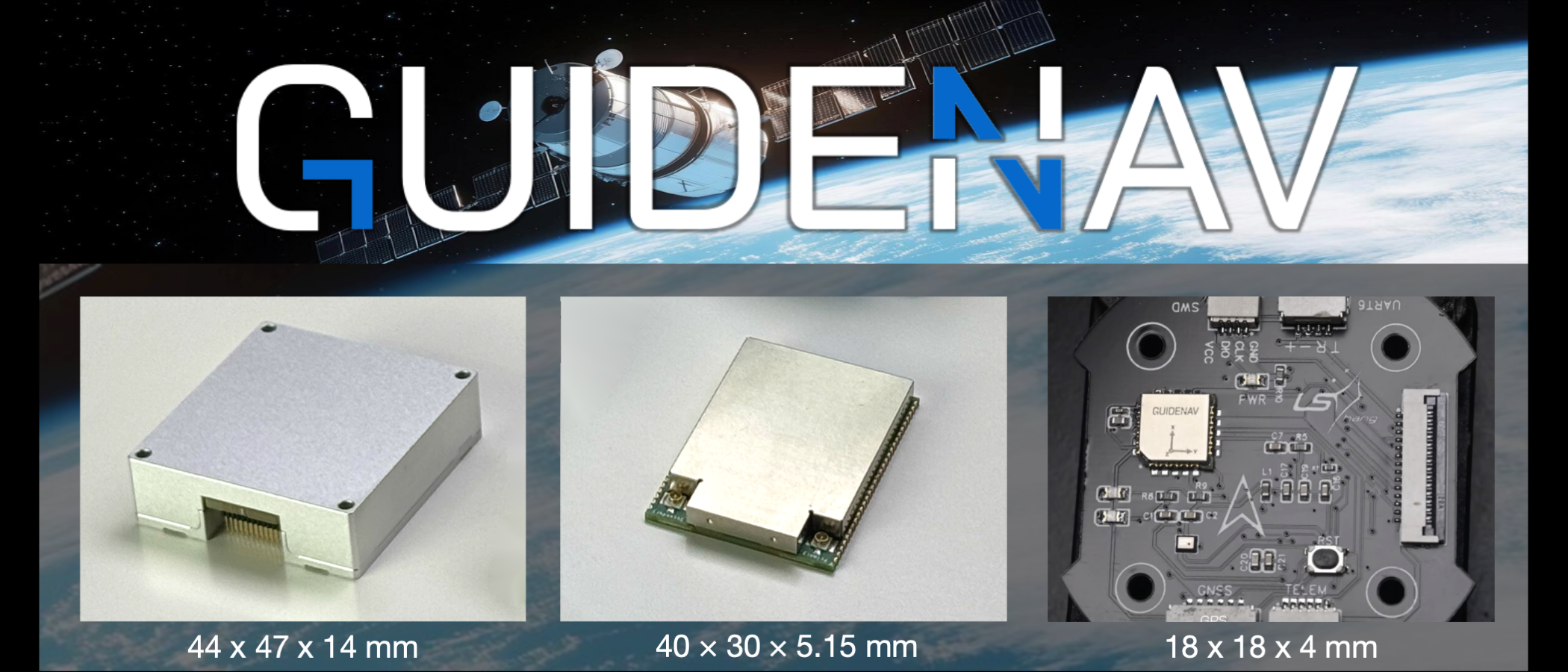
Bei GuideNav sind wir besonders stolz auf unsere hochpräzisen MEMS-IMUs wie die GUIDE900 und GUIDE900A , die Genauigkeiten von 0,1°/h bzw. 0,05°/h hochpräzise eignen , die traditionell von FOG-IMUs .
Hauptmerkmale von MEMS-IMUs:
- Kleine Größe : Ideal für kompakte Anwendungen wie Smartphones , Wearables und Militärdrohnen .
- Niedrige Kosten : Ideal für Anwendungen mit großen Stückzahlen, wie z. B. Automobilsysteme , Unterhaltungselektronik und Verteidigungssysteme , bei denen Leistung und Wirtschaftlichkeit in Einklang gebracht werden müssen.
- Mittlere Präzision : Während MEMS-IMUs traditionell eine geringere Genauigkeit als FOG-IMUs , schließen hochpräzise Modelle diese Lücke mittlerweile für viele Verteidigungsanwendungen.
- Geringer Stromverbrauch : Besonders effizient für batteriebetriebene Geräte, entscheidend für Militärdrohnen , intelligente Waffensysteme und andere mobile Verteidigungstechnologien.
Anwendungsbereiche von MEMS-IMUs:
- Verteidigung : Einsatzgebiete sind Militärdrohnen , Navigationssysteme für gepanzerte Fahrzeuge und Raketenleitsysteme . Diese Anwendungen profitieren von der Kompaktheit und den geringen Kosten von MEMS-IMUs
- Unterhaltungselektronik : Zu finden in Smartphones , Fitness-Trackern und Spielecontrollern .
- Fahrzeugsysteme : Werden zur Fahrzeugstabilitätskontrolle und zur autonomen Navigation .
- Drohnen und UAVs : Bereitstellung von Orientierung und Stabilisierung bei militärischen Drohnen und UAVs für Endverbraucher .
FOG IMU: Überblick und Eigenschaften
FOG-IMUs nutzen faseroptische Gyroskope (FOGs) zur Messung der Winkelgeschwindigkeit, wodurch sie eine extrem hohe Präzision und Stabilität erreichen. Dies macht FOG-IMUs ideal für Anwendungen, die minimale Drift und langfristige Zuverlässigkeit erfordern, wie beispielsweise die Luft- und Raumfahrtnavigation , die Lenkung von Flugkörpern und die High-End-Robotik .
Während FOG-IMUs allgemein für ihre Präzision und Langlebigkeit geschätzt werden, schließen MEMS-IMUs militärischen Anwendungen , wo Kosten, Größe und Stromverbrauch entscheidende Faktoren sind.
Hauptmerkmale von FOG-IMUs:
- Hohe Präzision : FOG-IMUs bieten eine extrem geringe Drift und eignen sich daher ideal für hochpräzise Anwendungen wie Satellitennavigation und militärische Leitsysteme.
- Langlebigkeit : Dank ihrer Fähigkeit, extremen Umweltbedingungen standzuhalten, FOG IMUs ideal für Luft- und Militärsysteme , die in rauen Umgebungen eingesetzt werden müssen.
- Höherer Stromverbrauch : FOG-IMUs verbrauchen im Allgemeinen mehr Strom und eignen sich daher besser für Systeme mit ausreichenden Energieressourcen.
- Größere Abmessungen : FOG-IMUs sind im Vergleich zu MEMS-IMUs , weshalb sie in größeren Systemen wie Flugzeugen und Raumfahrzeugen .
Anwendungsbereiche von FOG-IMUs:
- Luft- und Raumfahrt : Wird in Flugzeugen und Satellitennavigation , wo hohe Präzision und Stabilität von entscheidender Bedeutung sind.
- Verteidigung : Weit verbreitet in der Raketenlenkung , unbemannten Militärfahrzeugen und militärischen Navigationssystemen .
- High-End-Robotik : Einsatzgebiete sind Industrieroboter , Operationsroboter und autonome Navigationssysteme, wo Präzision und Langzeitstabilität erforderlich sind.
Wann sollte man sich für eine MEMS-IMU oder eine FOG-IMU entscheiden?
| Anwendungsfall | MEMS IMU | Nebel-IMU |
|---|---|---|
| Unterhaltungselektronik | Ideal für Smartphones, Wearables und Fitness-Tracker. | Aufgrund hoher Kosten und des hohen Stromverbrauchs nicht geeignet. |
| Luft- und Raumfahrt | Geeignet für kostengünstige, kleine Systeme mit moderaten Präzisionsanforderungen. | Unverzichtbar für hochpräzise Navigations- und Orientierungssysteme. |
| Autonome Fahrzeuge | Gut geeignet für kostengünstigere Lösungen mit moderaten Leistungsanforderungen. | Notwendig für hochpräzise Navigation in komplexen Umgebungen. |
| Militär & Verteidigung | Wird verwendet in **Militärdrohnen**, **Navigationssystemen** für **Fahrzeuge** und **Raketenleitsystemen**. | Wird häufig zur Lenkung von Raketen, Drohnen und zur Navigation unter schwierigen Bedingungen eingesetzt. |
| Robotik | Geeignet für Roboter im Konsumbereich oder für Bildungsprojekte. | Bevorzugt für Industrieroboter, Operationsroboter und andere präzisionsbasierte Systeme. |
Leistung und Kalibrierung von Inertialmesseinheiten (IMU)
Die Leistung von Inertialmesseinheiten (IMUs) kann durch verschiedene Faktoren wie Sensordrift, Temperatur und Umgebungsbedingungen beeinflusst werden. Um eine optimale Leistung zu gewährleisten, ist es unerlässlich, die wichtigsten Leistungsindikatoren (KPIs) von IMUs und die Kalibrierungsmethoden zur Verbesserung ihrer Genauigkeit zu verstehen.
IMU-Leistungsindikatoren
Die Leistungsfähigkeit einer Inertialmesseinheit (IMU) wird anhand mehrerer Schlüsselfaktoren bewertet, die ihre Genauigkeit und Zuverlässigkeit direkt beeinflussen. Im Folgenden sind die wichtigsten Leistungsindikatoren für IMUs aufgeführt:
| Leistungsindikator | Beschreibung |
|---|---|
| Bias-Stabilität | Die Beständigkeit der IMU-Messwerte über die Zeit. Eine stabile IMU weist minimale Messabweichungen auf. |
| Skalierungsfaktor | Das Verhältnis zwischen der tatsächlichen physikalischen Bewegung und dem Ausgangssignal der IMU. Fehler in diesem Verhältnis können zu einer falschen Dateninterpretation führen. |
| Lärm | Zufällige Schwankungen in den Messwerten des IMU-Sensors. Niedrige Rauschpegel deuten auf eine höhere Messgenauigkeit hin. |
| Zufallspfad | Beschreibt die Drift der Messwerte im Laufe der Zeit. Sie gibt an, wie stark der Messwert aufgrund von zufälligem Rauschen von seinem wahren Wert abweicht. |
| Auflösung | Die kleinste messbare Änderung der Sensorwerte der IMU. Eine höhere Auflösung verbessert die Messgenauigkeit. |
| Nichtlinearität | Die Abweichung von einer linearen Beziehung zwischen Eingangs- und Ausgangsgröße. Nichtlinearitäten können bei höheren Beschleunigungen oder Winkelgeschwindigkeiten zu Fehlern führen. |
| Temperaturempfindlichkeit | Die Messungen der IMUs variieren aufgrund von Änderungen der Umgebungstemperatur. IMUs mit geringer Temperaturempfindlichkeit liefern unter schwankenden Umgebungsbedingungen genauere Ergebnisse. |
IMU-Kalibrierungsmethoden
Die Kalibrierung ist ein entscheidender Prozess zur Verbesserung der Genauigkeit einer Inertialmesseinheit (IMU). Sie korrigiert Fehler, die durch Sensordrift, Fehlausrichtung und andere Faktoren entstehen können. Die IMU-Kalibrierung umfasst typischerweise drei primäre Sensorsysteme: Beschleunigungsmesser , Gyroskop und Magnetometer . Jeder dieser Sensoren erfordert spezifische Kalibrierverfahren, um genaue und zuverlässige Messungen zu gewährleisten.
1. Beschleunigungsmesserkalibrierung
Der Beschleunigungsmesser in einer IMU misst die lineare Beschleunigung entlang der X-, Y- und Z-Achse. Er ist jedoch häufig fehlerbehaftet, beispielsweise durch Abweichungen des Skalierungsfaktors, Fehlausrichtungen und Nichtorthogonalität der Achsen.
| Kalibrierungsmethode | Beschreibung |
|---|---|
| Statische Kalibrierung | Eine gängige Methode besteht darin, die IMU in einer bekannten Ausrichtung zu platzieren (z. B. flach auf einer Oberfläche). Durch Messung der Erdbeschleunigung (9,81 m/s²) können die Sensorfehler korrigiert werden. |
| Dynamische Kalibrierung | Dabei wird die IMU durch verschiedene bekannte Beschleunigungen und Richtungen bewegt, um Skalierungsfaktorfehler, systematische Abweichungen und Fehlausrichtungen zwischen den Achsen zu korrigieren. |
| Temperaturkompensation | Da Beschleunigungsmesser temperaturempfindlich sind, umfasst die Kalibrierung auch den Ausgleich von Temperaturschwankungen, die Messfehler verursachen könnten. |

2. Gyroskopkalibrierung
Das Gyroskop misst die Winkelgeschwindigkeit um die X-, Y- und Z-Achse der IMU. Gyroskope können Drift (bei der sich die Messwerte des Sensors mit der Zeit langsam ändern) und Bias-Instabilität (bei der eine konstante Abweichung in den Messungen auftritt) aufweisen.
| Kalibrierungsmethode | Beschreibung |
|---|---|
| Nullpunkt-Offset-Kalibrierung | Bei dieser Methode wird das Gyroskop in einer stationären Position platziert (es wird keine Bewegung ausgeführt), und die Abweichung bzw. der Bias wird gemessen und korrigiert. |
| Kalibrierung der Ratentabelle | Dabei wird die IMU mit verschiedenen bekannten Winkelgeschwindigkeiten gedreht, um etwaige Nichtlinearitäten oder Skalierungsfaktorfehler zu ermitteln. |
| Temperaturkalibrierung | Ähnlich wie Beschleunigungsmesser reagieren Gyroskope empfindlich auf Temperaturänderungen. Die Kalibrierung gleicht Abweichungen im Verhalten des Sensors bei unterschiedlichen Temperaturen aus. |
Durch die Kalibrierung des Gyroskops wird sichergestellt, dass die Winkelgeschwindigkeitsmessungen des IMU präzise und driftfrei sind, wodurch seine Leistung in dynamischen Umgebungen verbessert wird.
3. Magnetometerkalibrierung
Das Magnetometer misst Stärke und Richtung des Erdmagnetfelds und liefert Orientierungsdaten zur Bestimmung der Flugrichtung. Lokale magnetische Störungen, Fehlausrichtungen des Sensors und Fehler im Skalierungsfaktor können die Leistung von Magnetometern beeinträchtigen.
| Kalibrierungsmethode | Beschreibung |
|---|---|
| Kalibrierung von Harteisen | Dieses Verfahren kompensiert Magnetfeldverzerrungen, die durch die eigenen Komponenten des IMU (z. B. elektronische Bauteile) verursacht werden. |
| Weicheisenkalibrierung | Korrigiert Verzerrungen, die durch die Umgebung oder Materialien in der Nähe der IMU verursacht werden. |
| Mehrpunktkalibrierung | Das Magnetometer wird einer Vielzahl bekannter Magnetfeldstärken und -richtungen ausgesetzt, um Fehler zu erkennen und zu korrigieren. |
Die Kalibrierung des Magnetometers ist unerlässlich, um genaue Richtungs- und Orientierungsdaten zu erhalten, insbesondere wenn die IMU in Umgebungen mit wechselnden magnetischen Bedingungen eingesetzt wird.
Vorteile und Grenzen von Inertialmesseinheiten (IMUs)
Inertialmesseinheiten (IMUs) bieten herausragende Echtzeitleistung, Unabhängigkeit von externen Systemen und sind branchenübergreifend vielseitig einsetzbar. Allerdings müssen bei der Auswahl der passenden Technologie Drift , ihre Empfindlichkeit gegenüber Umwelteinflüssen und die hohen Kosten präziser Modelle MEMS-IMUs bieten ein ausgewogenes Verhältnis zwischen Kosten und Leistung für viele Anwendungen im Konsumgüter- und Industriebereich, während FOG-IMUs die erste Wahl für hochpräzise und lang andauernde Aufgaben in der Luft- und Raumfahrt sowie im Verteidigungsbereich sind. Das Verständnis der Stärken und Schwächen von IMUs hilft Ihnen, das optimale System für Ihre spezifischen Anforderungen auszuwählen.
Vorteile von Inertialmessgeräten
| Vorteil | Beschreibung |
|---|---|
| Hohe Präzision in dynamischen Umgebungen | IMUs liefern Echtzeitmessungen von Beschleunigung und Winkelgeschwindigkeit, die für Anwendungen in autonomen Fahrzeugen , der Luft- und Raumfahrt sowie der Robotik , wo GPS oder andere externe Referenzen nicht verfügbar sind. |
| Unabhängigkeit von externen Signalen | IMUs arbeiten ohne externe Signale wie GPS und sind daher in Umgebungen wie der U-Bahn-Navigation , der Weltraumforschung oder der Indoor-Robotik . |
| Kompakt und leicht | MEMS-IMUs sind klein und leicht und eignen sich daher ideal für Anwendungen wie Wearables , Drohnen und Unterhaltungselektronik, bei denen Platz und Gewicht entscheidend sind. |
| Geringer Stromverbrauch | MEMS-IMUs sind energieeffizient und eignen sich daher perfekt für batteriebetriebene Geräte wie Smartwatches und Fitness-Tracker , die über lange Zeiträume betrieben werden müssen. |
| Echtzeit-Datenverarbeitung | IMUs liefern hochfrequente Daten mit geringer Latenz und eignen sich daher für die Echtzeitsteuerung in der Robotik , die Stabilisierung von Drohnen und die Fahrzeugnavigation . |
| Langlebigkeit in rauen Umgebungen | FOG-IMUs und einige High-End -MEMS-IMUs starken Vibrationen , Temperaturschwankungen und Stößen standzuhalten , wodurch sie sich ideal für militärische und Luft- Raumfahrtanwendungen eignen. |
Grenzen von Inertialmessgeräten
| Einschränkung | Beschreibung |
|---|---|
| Drift im Laufe der Zeit | Die Gyroskope in IMUs weisen eine Drift , was ohne regelmäßige Neukalibrierung zu ungenauen Messungen . Dies stellt insbesondere bei Langzeitanwendungen ein erhebliches Problem dar. |
| Umweltsensibilität | IMUs reagieren empfindlich auf Umgebungsbedingungen wie Temperatur und Vibrationen , was zu Fehlern führen kann, insbesondere bei MEMS-IMUs , die anfälliger für diese Störungen sind. |
| Hohe Kosten (für hochpräzise Modelle) | Während MEMS-IMUs kostengünstig sind, hochpräzise IMUs wie FOG-IMUs teuer und aufgrund ihrer hohen Kosten und ihres hohen Stromverbrauchs möglicherweise nicht für alle Anwendungen geeignet. |
| Kurzfristige Genauigkeit vs. langfristige Stabilität | IMUs bieten eine hohe Kurzzeitgenauigkeit , aber ohne externe Korrektur (z. B. GPS ) kommt es zu Langzeitinstabilität – eine Herausforderung für hochpräzise Navigationsaufgaben über längere Zeiträume. |
| Komplexität bei der Datenfusion | IMUs benötigen oft eine Sensorfusion (z. B. die Integration von GPS und Magnetometern ), um Fehler im Laufe der Zeit zu korrigieren, was die Komplexität und den Rechenaufwand des Systems erhöht. |
| Begrenzte Genauigkeit bei hoher Dynamik | Bei hochdynamischen Anwendungen erreichen MEMS-IMUs möglicherweise nicht die Präzision von FOG-IMUs , insbesondere bei Anwendungen wie der Raketenlenkung oder der Raumfahrzeugausrichtung , die eine ultrahohe Präzision erfordern. |
Inertialmesseinheit (IMU) vs. andere Inertialsysteme: IMU vs. AHRS, IMU vs. INS
Inertialmesseinheiten (IMUs) sind in vielen Hightech-Anwendungen unverzichtbar, aber nicht die einzigen Systeme zur Messung von Bewegung, Orientierung und Navigation. Lageregelungssysteme (AHRS) und Inertialnavigationssysteme (INS) sind zwei weitere gängige Systeme, die ebenfalls auf Inertialsensoren basieren. Während IMUs die grundlegenden Daten für AHRS und INS liefern, bieten diese Systeme zusätzliche Funktionen und sind für spezifische Anwendungsfälle konzipiert. Im Folgenden vergleichen wir IMUs mit AHRS und INS .
IMU vs AHRS (Lage- und Kursreferenzsystem)
IMUs und AHRS werden beide zur Orientierungs- und Bewegungsverfolgung eingesetzt, unterscheiden sich jedoch hinsichtlich zusätzlicher Funktionen und ihrer jeweiligen Anwendungsfälle.
| Parameter | IMU | AHRS |
|---|---|---|
| Definition | Eine **Inertialmesseinheit (IMU)** misst Beschleunigung und Winkelgeschwindigkeit und liefert so Rohdaten der Bewegung. | Ein **Lage- und Kursreferenzsystem (AHRS)** kombiniert **IMU-Daten** mit zusätzlichen Sensoren (z. B. Magnetometern), um Orientierungs- und Kursdaten zu liefern. |
| Komponenten | Typischerweise umfasst es **Beschleunigungsmesser** und **Gyroskope**, manchmal auch **Magnetometer**. | Verwendet **IMU-Daten** (Beschleunigungsmesser und Gyroskope) sowie **Magnetometer** und manchmal andere Sensoren (z. B. **GPS**, **Barometer**). |
| Ausgabe | Liefert Rohdaten zu Beschleunigung und Winkelgeschwindigkeit. | Ausgabe der Orientierung (Lage) und der Richtung (Kompassrichtung) in einem globalen Bezugssystem (z. B. Norden, Osten, Unten). |
| Genauigkeit | IMUs ermöglichen eine genaue Bewegungserfassung, können aber im Laufe der Zeit aufgrund von Sensorfehlern **driften**. | AHRS verbessert die Genauigkeit durch die Verwendung externer Referenzen (Magnetometer, GPS) und reduziert so die Drift im Laufe der Zeit. |
| Komplexität | Einfacher in Design und Bedienung, typischerweise für grundlegende Bewegungserfassung. | Komplexer aufgrund der zusätzlichen |
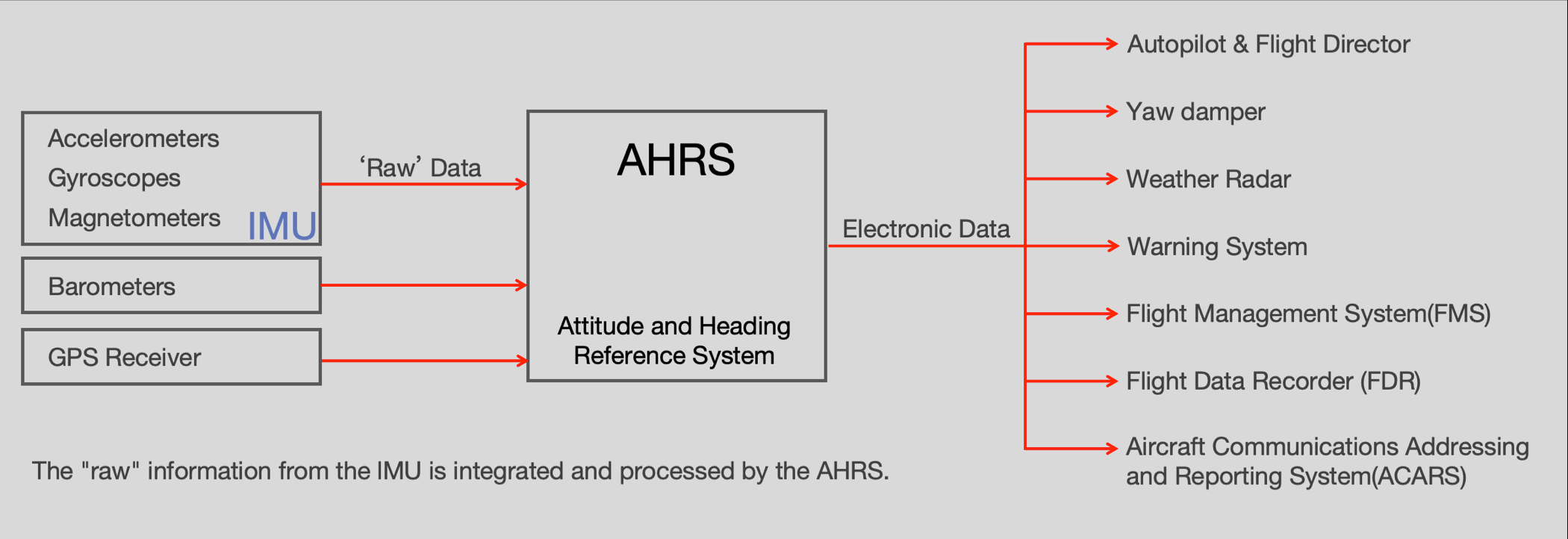
Hauptunterschied : IMUs liefern Rohsensordaten, während AHRS diese Daten mit Daten anderer Sensoren (wie Magnetometern) kombiniert, um präzise Orientierung und Kurs zu bestimmen. AHRS wird typischerweise eingesetzt, wenn genaue Lage- und Kursinformationen benötigt werden.
IMU vs INS (Inertialnavigationssystem)
Ein Inertialnavigationssystem (INS) ist ein fortschrittlicheres System, das IMU- Daten mit zusätzlichen Verarbeitungsmöglichkeiten integriert und häufig Algorithmen wie den Kalman-Filter , um die Position, Geschwindigkeit und Orientierung eines Objekts zu berechnen.
| Parameter | IMU | INS |
|---|---|---|
| Definition | Eine **Inertialmesseinheit (IMU)** misst Beschleunigung und Winkelgeschwindigkeit und liefert so Rohdaten der Bewegung. | Ein **Inertialnavigationssystem (INS)** kombiniert eine **IMU** mit computergestützter Datenverarbeitung (z. B. Kalman-Filter), um Position, Geschwindigkeit und Orientierung zu erfassen. |
| Komponenten | Beinhaltet **Beschleunigungsmesser** und **Gyroskope**; manchmal **Magnetometer**. | Kombiniert eine **IMU**, **Algorithmen** zur Sensorfusion und manchmal weitere Sensoren (z. B. **GPS**). |
| Ausgabe | Liefert Beschleunigungs- und Winkelgeschwindigkeitsdaten. | Gibt **Position**, **Geschwindigkeit** und **Orientierung** aus und bietet somit vollständige Navigationsdaten. |
| Genauigkeit | Die Genauigkeit von IMUs ist aufgrund von Drift im Laufe der Zeit begrenzt. | **INS** verbessert die Genauigkeit im Laufe der Zeit durch die Fusion von IMU-Daten mit Algorithmen und manchmal externen Korrekturen (z. B. GPS). |
| Komplexität | Einfach gehalten, liefert es nur Bewegungsdaten. | Komplex aufgrund von Datenfusion, Sensorverarbeitung und dem Bedarf an Rechenalgorithmen. |
| Anwendungen | Wird für grundlegende Bewegungserfassung eingesetzt, beispielsweise bei Drohnen, in der Automobilindustrie und in der Robotik. | Wird zur **Navigation** in **Flugzeugen**, **U-Booten**, **Raumfahrzeugen** und **militärischen Anwendungen** eingesetzt, wo die langfristige Positionsverfolgung von entscheidender Bedeutung ist. |
Hauptunterschied : Während IMUs Bewegung und Orientierung messen, INS diese Daten zusammen mit Algorithmen, um Position , Geschwindigkeit und Orientierung im Zeitverlauf zu berechnen und bietet so eine vollständige Navigationslösung.
Markt für Inertialmesseinheiten und zukünftige Entwicklung: Typen, Marktaussichten und Trends
Inertialmesseinheiten (IMUs) sind integraler Bestandteil moderner Navigations-, Bewegungserfassungs- und Stabilitätskontrollsysteme in verschiedenen Branchen. Die steigende Nachfrage nach autonomen Systemen , Robotik , Luft- und Raumfahrt sowie Unterhaltungselektronik hat die Entwicklung von IMU-Technologien vorangetrieben und deren weltweite Verbreitung erhöht. Angesichts des kontinuierlichen Wachstums des IMU-Marktes ist es unerlässlich, die verschiedenen IMU-Typen, ihre aktuelle Marktlage und die Trends, die ihre zukünftige Entwicklung prägen, zu verstehen.
Verschiedene IMU-Typen und ihr Marktüberblick
IMUs gibt es in verschiedenen Ausführungen, die jeweils unterschiedliche Anforderungen an Genauigkeit, Größe, Kosten und Leistung erfüllen. Die gängigsten IMU-Typen sind MEMS-IMUs , FOG-IMUs und RLG-IMUs (Ringlasergyroskop-IMUs) . Jeder Typ besitzt seine spezifischen Eigenschaften und eignet sich daher für bestimmte Anwendungen. Im Folgenden betrachten wir diese Typen und ihre aktuelle Marktposition genauer.
1. MEMS-IMUs
MEMS-IMUs sind aufgrund ihrer kompakten Bauweise , der geringen Kosten und des niedrigen Stromverbrauchs . Diese IMUs nutzen mikroelektromechanische Systeme (MEMS) zur Messung von Beschleunigung und Winkelgeschwindigkeit. MEMS-IMUs eignen sich hervorragend für Unterhaltungselektronik, Automobilanwendungen und kostengünstige Systeme.
| Merkmal | MEMS IMU |
|---|---|
| Größe | Kompakt , klein und leicht. |
| Kosten | Niedrige Kosten, wodurch sie für den Massenmarkt erschwinglich sind. |
| Präzision | Mäßige Präzision, wobei neuere Modelle eine höhere Genauigkeit erreichen (z. B. **0,1°/h**). |
| Anwendungen | Wird eingesetzt in **Unterhaltungselektronik**, **Automobilsystemen**, **Drohnen**, **Robotik** und **Wearables**. |
| Marktwachstum | Starkes Wachstum wird durch **Smartphones**, **Fahrzeugsicherheit**, **Drohnentechnologie** und **IoT-Geräte** angetrieben. |
Marktausblick für MEMS-IMUs:
Der Markt für MEMS-IMUs dürfte aufgrund ihrer Erschwinglichkeit und Vielseitigkeit weiter wachsen. Diese IMUs finden zunehmend Anwendung in Smartphones , Wearables , Fahrzeugsicherheitssystemen , Drohnenstabilisierung und Robotik . Die Automobil- und Unterhaltungselektronikbranche bleiben die wichtigsten Wachstumstreiber, insbesondere durch die steigende Verbreitung von autonomen Fahrzeugen und Geräten (Internet der Dinge)
2. FOG-IMUs (Fiber Optic Gyroscope IMUs)
FOG-IMUs bieten hohe Präzision und geringe Drift und eignen sich daher ideal für Luft- und Raumfahrt , Verteidigung und Navigationssysteme in Umgebungen, die langfristige Stabilität und Genauigkeit erfordern. FOGs nutzen Glasfasertechnologie zur Messung der Winkelgeschwindigkeit und sind für ihre Robustheit unter extremen Bedingungen bekannt.
| Merkmal | Nebel-IMU |
|---|---|
| Größe | Größer und robuster als MEMS-IMUs, entwickelt für hochpräzise Anwendungen. |
| Kosten | **Höhere Kosten**, wodurch sie sich für Spezialanwendungen in der **Luft- und Raumfahrt** sowie im **Militärbereich** eignen. |
| Präzision | **Hohe Präzision** bei minimaler Drift, ideal für **Langzeitstabilität** in **Luft- und Raumfahrt**, **Verteidigung** und **Navigationssystemen**. |
| Anwendungen | Einsatzgebiete sind **Luft- und Raumfahrt**, **militärische Verteidigung**, **hochwertige Navigationssysteme** und **Präzisionsleitsysteme**. |
| Marktwachstum | Stetiges Wachstum in den Bereichen **Luft- und Raumfahrt**, **Militär** und **Hochpräzisionsnavigation**, jedoch begrenzt durch hohe Kosten. |
Marktaussichten für FOG-IMUs:
Der für FOG-IMUs wird voraussichtlich in Luft- und Raumfahrt , militärische Verteidigung und hochpräzise Navigation . Die steigende Nachfrage nach autonomen Fahrzeugen , Weltraumforschung und Raketenleitsystemen wird die Verbreitung von FOG-IMUs vorantreiben. Allerdings stellen die hohen Kosten und der hohe Stromverbrauch weiterhin limitierende Faktoren für eine breitere Marktdurchdringung dar, insbesondere im Bereich kostengünstiger Verbraucheranwendungen.
3. RLG-IMUs (Ringlasergyroskop-IMUs)
RLG-IMUs ähneln FOG-IMUs , verwenden jedoch Ringlasergyroskope zur Messung der Winkelgeschwindigkeit. RLG-IMUs zeichnen sich durch extrem hohe Präzision und Stabilität aus und werden häufig im Militärbereich, in der Luft- und Raumfahrt sowie in anderen Hochleistungsbranchen eingesetzt.
| Merkmal | RLG IMU |
|---|---|
| Größe | Ähnlich wie **FOG IMUs**, **größer** und robuster, entwickelt für **hochpräzise Anwendungen** in rauen Umgebungen. |
| Kosten | **Sehr hohe Kosten**, im Allgemeinen Premium-Systemen mit kritischer Missionsleistung in der **Luft- und Raumfahrt** sowie der **Militärindustrie** vorbehalten. |
| Präzision | **Extrem hohe Präzision** bei minimaler Drift, häufig verwendet in **Raumschiffnavigationssystemen** und **militärischen Raketenleitsystemen**. |
| Anwendungen | Wird verwendet in **Militärsystemen**, **Raumfahrzeugen**, **Satellitennavigationssystemen** und anderen **hochpräzisen Verteidigungssystemen**. |
| Marktwachstum | Obwohl **RLG-IMUs** eine Nischenlösung darstellen, sind sie weiterhin unverzichtbar für **Hochleistungssysteme in den Bereichen Verteidigung, Luft- und Raumfahrt** sowie Weltraumtechnik. Der Markt ist aufgrund hoher Kosten stabil und verzeichnet ein moderates Wachstum. |
Marktausblick für RLG IMUs:
Obwohl der für RLG-IMUs aufgrund der hohen Kosten begrenzt ist, bleiben sie für militärische Verteidigungs- und Luftfahrtanwendungen , insbesondere für Raketenlenk- und Satellitenorientierungssysteme FOG-IMUs und neuen Technologien konkurrieren
Zukunftstrends und Entwicklung von Inertialmessgeräten
Die Zukunft von IMUs ist geprägt von mehreren Schlüsselentwicklungen, die durch Fortschritte in der Sensortechnologie, Datenverarbeitungsalgorithmen und die wachsende Nachfrage nach Präzisionssystemen in verschiedenen Branchen vorangetrieben werden. Hier einige der wichtigsten Trends:
1. Miniaturisierung und Integration mit anderen Sensoren
Mit steigender Nachfrage nach kompakten und effizienten Systemen geht ein zunehmender Trend zur Miniaturisierung von IMUs . MEMS-IMUs werden sich weiterentwickeln und noch kleiner, kostengünstiger und leistungsfähiger werden. Darüber hinaus die Sensorfusion ein wichtiges Entwicklungsgebiet, in dem IMUs mit anderen Sensoren wie Magnetometern , GPS und Barometern , um Leistung und Genauigkeit zu verbessern.
2. Hohe Präzision zu geringeren Kosten
Jüngste Fortschritte in der MEMS-IMU- Technologie treiben den Trend zu höherer Präzision bei geringeren Kosten . Modelle wie GUIDE900 und GUIDE900A erreichen nun von 0,1°/h bzw. 0,05°/h und schließen damit die Lücke zu FOG-IMUs . Dies bedeutet, dass MEMS-IMUs hochpräzisen Anwendungen eingesetzt werden der Luft- sowie im Militärbereich FOG-IMUs bisher weit verbreitet waren .
3. Integration in autonomen Systemen
IMUs sind integraler Bestandteil der Entwicklung autonomer Fahrzeuge , Drohnen und Roboter . Das wachsende Interesse an autonomer Navigation und präziser Bewegungssteuerung wird die Nachfrage nach fortschrittlichen IMUs weiter steigern. Die Integration von IMUs mit KI-Algorithmen und maschinellem Lernen ermöglicht es Systemen, sich effektiver an reale Umgebungen anzupassen.
4. Einsatz von KI und Sensorfusion
KI-Algorithmen der IMU-Datenverarbeitung eine zunehmend wichtige Rolle spielen . Durch die Kombination von IMU-Daten mit anderen Sensordaten und den Einsatz von maschinellem Lernen werden autonome Systeme präzisere Vorhersagen treffen und Anpassungen vornehmen können. Die Kombination von IMUs mit Technologien wie Bildverarbeitungssystemen , LiDAR und Radar dürfte die Grenzen der Echtzeitnavigation und -stabilisierung erweitern.
5. Verbesserte Haltbarkeit und Umweltbeständigkeit
Es wird erwartet, dass IMUs noch robuster und widerstandsfähiger gegenüber extremen Bedingungen wie Temperaturen, Vibrationen und elektromagnetischen Störungen werden. FOG-IMUs und MEMS-IMUs werden sich weiterentwickeln, um der steigenden Nachfrage in der Luft- und Raumfahrt , der Verteidigung und in industriellen Anwendungen .
