Inertialsensoren sind naturgemäß unvollkommen. Bias-Drift, Random-Walk und thermische Empfindlichkeit sind keine Anomalien, sondern erwartbare Verhaltensweisen. Entscheidend ist nicht die Beseitigung dieser Fehler, sondern deren Bewältigung.
Im Laufe der Jahre habe ich gelernt, dass zuverlässige Trägheitsnavigation nicht allein von den Sensorspezifikationen abhängt, sondern davon, wie gut man die Ungenauigkeiten versteht und kompensiert. Ob man nun MEMS oder FOG verwendet, der Erfolg hängt davon ab, was passiert, nachdem der Sensor Daten liefert.
der Trägheitsnavigation ist letztendlich durch die Qualität der Modellierung und Kompensation von Sensorfehlern begrenzt. Von systematischer Abweichung bis hin zu zufälligen Abweichungen erfordert eine effektive Korrektur eine Kombination aus Hardware-Design, Kalibrierungsroutinen und algorithmischer Echtzeitkorrektur.
Die Trägheitsnavigation ist nicht allein durch die Hardware begrenzt. Die Hardwareleistung bildet die Untergrenze, aber die Obergrenze wird durch die Effektivität des Fehlermanagements bestimmt.
Inhaltsverzeichnis
Warum ist die Fehlerkompensation der eigentliche Flaschenhals in INS?
Trägheitsnavigationssysteme fallen in der Regel nicht plötzlich aus – ihre Genauigkeit verschlechtert sich schleichend . Was mit einer minimalen Abweichung im Gyroskop oder einem leichten Offset im Beschleunigungsmesser , entwickelt sich langsam zu einem zunehmenden Fehler in Lage, Geschwindigkeit und Position . Ich habe erlebt, wie ein Trägheitsnavigationssystem innerhalb von Minuten von einer Genauigkeit im Submeterbereich auf unbrauchbar abdriftete – nicht weil die Sensoren defekt waren, sondern weil der Fehler nicht kompensiert wurde .
Egal wie genau Ihre IMU laut Datenblatt sein soll, ein unkompensiertes INS driftet immer . Und in Umgebungen ohne GNSS-Empfang wird diese Drift missionskritisch. Eine effektive Kompensation ist kein Bonus, sondern die Grundlage eines zuverlässigen INS .
Kategorisierung von INS-Fehlern: Was Sie modellieren können vs. was Sie nicht modellieren können
Bei der Arbeit mit Trägheitsnavigationssystemen achte ich als Erstes darauf, wie sich die Fehler im Zeitverlauf entwickeln. Manche sind vorhersehbar, andere nicht. Und dieser Unterschied ist bei der Kompensation von großer Bedeutung.
Systematische Fehler: vorhersehbar und korrigierbar
Diese Effekte sind, wenn sie nicht korrigiert werden, über Zeit und Temperatur hinweg reproduzierbar:
- Bias-Drift bei Gyroskopen und Beschleunigungsmessern
- Nichtlinearität des Skalierungsfaktors
- Geringfügige Fehlausrichtungen zwischen den Sensorachsen
- Thermische Empfindlichkeit, die die Leistung je nach Umgebung verändert
Mit einer soliden Kalibrierungsroutine lassen sich diese Fehler in der Regel einmal messen und konsequent kompensieren – solange Ihre Bedingungen innerhalb der Grenzen bleiben.
Zufällige Fehler: unvorhersehbar, aber charakterisierbar
Dann gibt es Fehler, die nicht behoben, sondern nur modelliert werden können. Dazu gehören:
- Winkel-Zufallswanderung (ARW)
- Velocity Random Walk (VRW)
- Sensorweißrauschen
- Vibrationsbedingte Artefakte, insbesondere bei mobilen Plattformen
Fazit: Systematische Fehler werden im Labor behoben. Zufällige Fehler werden im Feld bekämpft.
Wie breiten sich INS-Fehler im Laufe der Zeit aus?
Bevor wir über Kompensation sprechen, ist es wichtig zu verstehen, wie sich Fehler in einem INS tatsächlich verhalten. Sie entstehen nicht einfach – sie wachsen, akkumulieren sich und interagieren mit der Systemdynamik auf oft unterschätzte Weise. Schauen wir uns das genauer an.
Kleine Fehler bleiben nicht klein.
In einem Trägheitsnavigationssystem verstärkt sich selbst eine geringfügige Abweichung des Gyroskops oder ein Beschleunigungsfehler im Mikro-g-Bereich mit der Zeit. Das liegt daran, dass INS durch die Integration von Sensordaten arbeitet – das heißt, jeder Fehler kumuliert sich mit jedem Schritt.
Integration ist ein Multiplikator.
Eine Abweichung der Ausrichtung beeinflusst die Geschwindigkeit. Ein Geschwindigkeitsfehler wiederum wirkt sich auf die Position aus. Diese Kettenreaktion ist der Grund, warum ein System mit scheinbar guten technischen Daten nach 30 Minuten ohne GNSS-Signal immer noch Hunderte von Metern abdriften kann.
Das Bewegungsprofil ist wichtig. Sehr wichtig.
Die Bewegungsart Ihres Systems beeinflusst, welche Fehler dominieren. Bei statischen Plattformen spielen Langzeitabweichungen und thermische Drift eine entscheidende Rolle. In hochdynamischen Systemen – wie Drohnen, Raketen oder schnellen Rovern – werden Skalenfaktor-Nichtlinearität und Zeitverzögerung kritischer als die Abweichung selbst.
Lange Missionen verstärken alles.
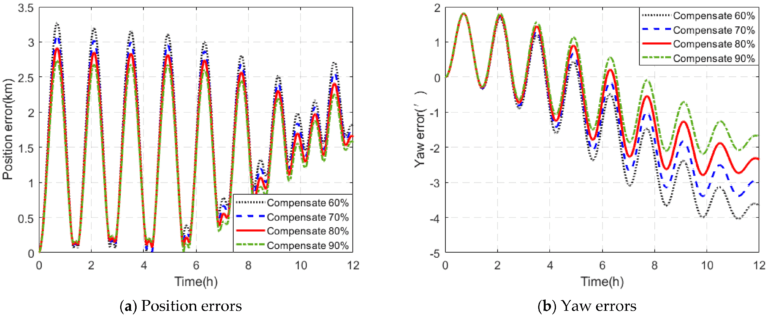
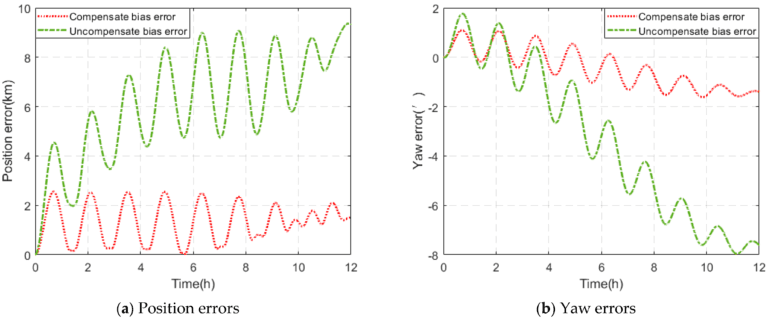
Ob es sich um eine 12-stündige Vermessungsroute oder einen 2-minütigen Raketenflug handelt, je länger Ihr INS ohne Korrektur arbeitet, desto wichtiger wird Ihre Fehlermodellierung.
Modellierung von Sensorfehlern zur effektiven Kompensation
Bevor Sie in einem INS etwas korrigieren können, müssen Sie verstehen, was Sie korrigieren. Die systematische Abweichung, die Drift und das Rauschen eines Sensors sind keine Fehler – sie sind charakteristische Verhaltensweisen. Und solange Sie diese nicht korrekt modellieren, ist Ihre Kompensationsstrategie reine Spekulation.
Ich stütze mich üblicherweise auf vier zentrale Modellierungsmethoden. Jede zielt auf unterschiedliche Fehlertypen ab, und zusammen ergeben sie ein klares Bild davon, wie sich Ihr System verhalten wird – nicht nur im Labor, sondern auch im Feld.
| Modellierungsmethode | Hauptzweck | Behandelte Fehlertypen | Warum das wichtig ist |
|---|---|---|---|
| Allan-Varianz | Analysieren Sie, wie sich das Sensorrauschen im Laufe der Zeit entwickelt | ARW, Bias-Instabilität, zufällige Drift | Unverzichtbar für die Filterabstimmung und Sensorbewertung |
| Sechs-Positionen-Kalibrierung | Schätzung von festen Verzerrungen und Fehlausrichtungen | Verzerrung, Skalierungsfaktor, Achsenfehlausrichtung | Ermöglicht die präzise Beseitigung statischer Fehler |
| Thermische Kalibrierung | Variation der Kartenausgabe über verschiedene Temperaturen hinweg | Temperaturinduzierte Vorspannung und Verstärkungsdrift | Unerlässlich für reale Outdoor- und mobile Plattformen |
| PSD-Analyse | Sensorrauschen anhand der Frequenz verstehen | Weißes Rauschen, niederfrequente Wanderung | Unterstützt die Filterentwicklung, ohne die tatsächliche Bewegung zu unterdrücken |
Tipp: Kombinieren Sie mindestens drei dieser Methoden, bevor Sie sich bei GNSS-unfähigen oder länger andauernden Missionen auf Ihr INS verlassen.
Hardwarebasierte Fehlerkorrekturverfahren
Gute Software kann schlechte Hardware nicht retten. Bei Trägheitsnavigationssystemen beeinflussen mechanische, thermische und elektrische Konstruktionsentscheidungen die Langzeitstabilität unmittelbar . Dies sind die Kerntechniken, auf die ich mich beim Aufbau robuster INS-Plattformen stütze.
- Schwingungsisolierung ist unerlässlich.
Ungefilterte mechanische Vibrationen erzeugen falsche Bewegungssignale. Der Einsatz abgestimmter Isolatoren oder geeigneter, gedämpfter Sensorhalterungen kann hochfrequentes Rauschen deutlich reduzieren, insbesondere bei Kettenfahrzeugen oder Hubschraubern.
- Die thermische Konstanz gewährleistet die Gültigkeit Ihrer Kalibrierung.
Die Sensorausgabe driftet mit der Temperatur. Passive Isolierung oder aktive Heizung können dazu beitragen, die Betriebstemperatur innerhalb des kalibrierten Bereichs zu halten.
- Netzrauschen wird zu Signalrauschen.
Spannungswelligkeit und elektromagnetische Störungen verursachen subtile, aber anhaltende Beeinträchtigungen analoger und digitaler Signale. Ich verwende daher stets saubere Spannungsversorgungen, rauscharme Regler und eine strikte Trennung von analogen und digitalen Signalen.
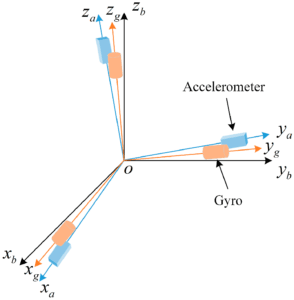
- Die Montagegenauigkeit beeinflusst die Ausrichtung.
Selbst geringfügige mechanische Verschiebungen können zu erheblichen Fehlern in Lage und Geschwindigkeit führen. Verwenden Sie starre, präzisionsgefertigte Halterungen und kontrollieren Sie die Ausrichtung und das Drehmoment der IMU sorgfältig.
- Verwenden Sie Sensoren, die zur Mission passen.
Wählen Sie nicht einfach den „besten“ Sensor, sondern einen, der zu Ihrem Toleranzbereich passt. Bei längeren GNSS-Ausfällen ist die Stabilität der Messgenauigkeit entscheidend. Bei schnellen Plattformen haben niedrige ARW und Bandbreite Priorität.
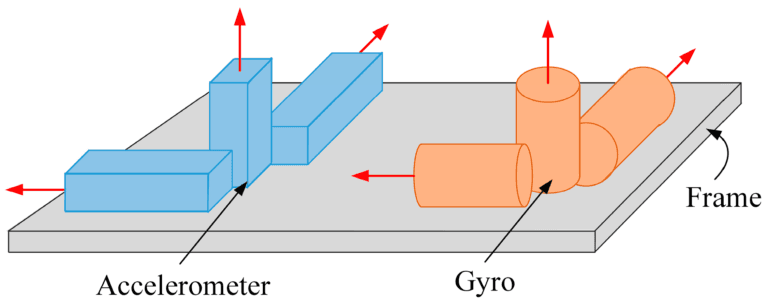
Fazit: Die beste Leistung bei der Trägheitsmessung beginnt lange vor der Datenerfassung – sie beginnt damit, wie der Sensor am Rahmen befestigt wird.
Softwarebasierte Vergütungstechniken
Sobald die Hardware stabil läuft, übernimmt die Software. Hier findet der Großteil der Driftkorrektur statt , und hier kann ein gutes Modell auch einen mittelmäßigen Sensor wie einen Spitzensensor funktionieren lassen. So gehe ich in der Praxis vor:
- Beginnen Sie mit einer ordnungsgemäßen Kalibrierung.
Nutzen Sie statische und dynamische Verfahren, um Abweichungen, Skalierungsfaktoren, Fehlausrichtungen und das Temperaturverhalten zu messen. Ohne eine gute Kalibrierungsbasislinie ist alles Weitere reine Spekulation.
- Verwenden Sie Filter, die zu Ihrer Dynamik passen.
Erweiterte Kalman-Filter (EKF), Unscented Kalman-Filter (UKF) oder komplementäre Filter – wählen Sie je nach Bewegungsprofil und verfügbaren Hilfsquellen. Die falsche Filterstruktur ist schlimmer als gar kein Filter.
- Die Temperaturkompensation ist nicht verhandelbar.
Unabhängig davon, ob Sie einen FOG- oder einen MEMS-IMU-Sensor verwenden, ändert sich das Sensorverhalten mit der Temperatur. Eine Echtzeitkorrektur mithilfe interner oder externer Temperatursensoren kann die Drift um eine Größenordnung reduzieren.
- Adaptive Filterung verbessert die Überlebensfähigkeit.
Bei mehrphasigen Missionen (z. B. Start, Flugphase, Abstieg) ändern sich die Rauscheigenschaften der Sensoren. Durch adaptive Filterabstimmung – basierend auf Geschwindigkeits-, Vibrations- oder Umgebungsdaten – kann sich Ihr System bedarfsgerecht anpassen.
- Die Regelung mit geschlossenem Regelkreis sorgt dafür, dass die Werte im Rahmen bleiben.
Um das Fehlerwachstum zu begrenzen, sollten GNSS-, Odometrie-, Barometer- oder Magnetometeraktualisierungen verwendet werden. Selbst eine Korrektur mit niedriger Rate alle paar Sekunden verbessert die Leistung bei lang andauernden Aufgaben deutlich.
Das Wichtigste ist: Software kann Genauigkeit nicht erfinden – aber sie kann sie schützen , erweitern und wiederherstellen, wenn etwas schiefgeht. Und genau das muss ein gutes INS leisten.
Die Rolle der Sensorfusion bei der Unterdrückung der INS-Drift
Selbst die besten Trägheitsnavigationssysteme driften – das ist kein Fehler, sondern ein physikalisches Gesetz . Die eigentliche Frage ist, wie man diese Drift mithilfe anderer Sensoren begrenzen kann. Hier erweist sich die Sensorfusion als das leistungsstärkste Werkzeug des Systems.
GNSS + INS: Die klassische Lösung
Wenn GNSS verfügbar ist, selbst wenn es nur zeitweise funktioniert, liefert es absolute Positionsaktualisierungen, um die INS-Drift zu begrenzen.
Ideal für: Langzeitmissionen, mobile Kartierung, UAVs
Vorteil: präzise Korrekturen, ausgereifte Filter (EKF)
Achtung: Anfällig für Störungen, Signalausfälle und Mehrwegeempfang
FOG + MEMS Hybrid: Präzision und Kosten im Gleichgewicht
Die Kombination eines stabilen FOG mit reaktionsschnellem MEMS bietet Ihnen das Beste aus beiden Welten – geringe Drift und schnelle Reaktion.
Ideal für: mittelgroße UAVs, Marineplattformen, Robotersysteme
Vorteil: besseres ARW + niedrigeres SWaP
Hinweis: Erfordert sorgfältige Integration und Kreuzkalibrierung
Vision / LiDAR + INS: GNSS-freie Kontinuität
Visuelle Odometrie oder LiDAR SLAM können relative Lagedaten liefern, wenn GNSS nicht verfügbar ist, beispielsweise in Innenräumen oder unterirdisch.
Ideal für: autonome Fahrzeuge, Tunnel, Lagerhallen, Bergwerke
Vorteil: vollständig autark
Hinweis: Sichtverbindung erforderlich, empfindlich gegenüber Beleuchtung und Objektdichte
Timing ist alles. Fusion funktioniert nur, wenn Ihre Sensoren synchronisiert sind. Nicht übereinstimmende Zeitstempel richten mehr Schaden als Nutzen an.
In der Praxis geht es bei Fusion nicht darum, mehr Sensoren hinzuzufügen, sondern darum, zu wissen, welchem Sensor man im richtigen Moment vertrauen kann.
GuideNavs Ansatz zur INS-Zuverlässigkeit
Nach allem, was ich in der Praxis gesehen habe – von unbemannten Luftfahrzeugen über Vermessungsfahrzeuge bis hin zu maritimen Systemen – bleibt eines gewiss: Die tatsächliche Leistungsfähigkeit eines INS hängt von allem ab, was den Sensor umgibt .
Bei GuideNav ist genau das unser Fokus.
- Jedes Gerät wird über alle Temperaturbereiche und Achsen hinweg vollständig kalibriert , nicht nur chargenweise geprüft.
- Wir liefern echte Allan-Varianzdaten und Unterstützung bei der Filteroptimierung – nicht nur Datenblätter.
- Unsere FOG- und MEMS-Modelle verfügen über sofort einsatzbereite Integrationswerkzeuge : stabiles Timing, saubere Schnittstellen und Unterstützung für Fusion.
- Und weil wir nicht den ITAR-Bestimmungen unterliegen , sind unsere Systeme für den weltweiten Einsatz in Verteidigungs-, Industrie- oder Forschungsprogrammen geeignet.
Sie erhalten nicht nur einen Sensor – Sie erhalten eine Navigationsplattform, auf die Sie sich verlassen können, wenn andere Systeme ausfallen.