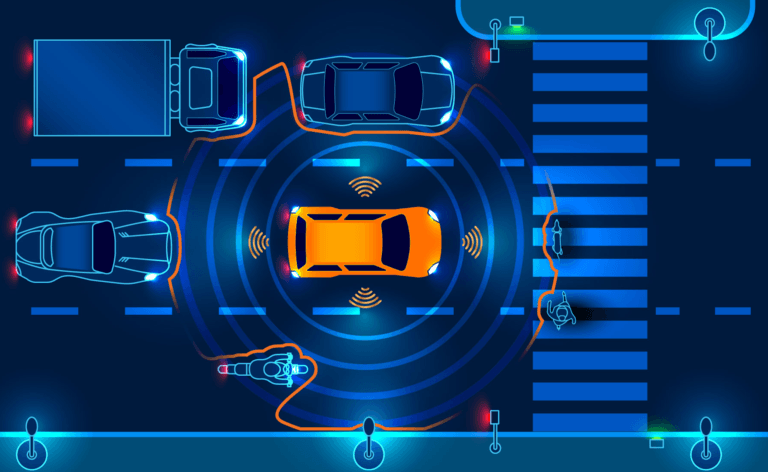
Autonome Fahrzeuge können sich ohne genaue Positionsbestimmung nicht sicher fortbewegen – doch herkömmliches GPS mit seiner Fehlertoleranz von 1–3 m ist für spurgenaue Entscheidungen viel zu unpräzise. In Straßenschluchten oder Tunneln brechen die Signale komplett ab, sodass das System quasi „blind“ ist. Um zentimetergenaue Positionsbestimmung zu erreichen, nutzen moderne Plattformen für autonomes Fahren die Fusion mehrerer Sensoren. Sie kombinieren GNSS, IMU, LiDAR und visuelle Wahrnehmung, um unter allen Fahrbedingungen eine kontinuierliche und zuverlässige Lokalisierung zu gewährleisten.
Autonome Fahrzeuge erreichen eine Genauigkeit im Zentimeterbereich durch GNSS/INS-Integration, LiDAR-Kartierung und visuelle Wahrnehmung, wobei hochpräzise IMUs den Kern der Lokalisierung bilden, wenn GPS-Signale ausfallen.
Die Lokalisierung ist das unsichtbare Rückgrat des autonomen Fahrens. Sie teilt einem Fahrzeug seine genaue Position mit, selbst wenn Satellitenempfang fehlt. Durch die Kombination von IMU-, GNSS-, LiDAR- und Kameradaten gewährleisten moderne Systeme eine präzise Positionierung auf jeder Straße, in jedem Tunnel und in jeder Straßenschlucht.
Inhaltsverzeichnis
Die Kerntechnologien hinter der autonomen Lokalisierung
Moderne autonome Fahrlokalisierungssysteme kombinieren vier wichtige Sensortechnologien, von denen jede eine einzigartige Rolle bei der Wahrnehmung und Navigation spielt:
- GNSS (Globales Navigationssatellitensystem): Liefert globale Koordinaten und absolute Positionsreferenz.
- INS (Inertiales Navigationssystem): Verfolgt Bewegungen mithilfe von Beschleunigungsmessern und Gyroskopen und überbrückt so Lücken, wenn GNSS-Signale ausfallen.
- LiDAR (Light Detection and Ranging): Erzeugt dreidimensionale Umgebungskarten für die zentimetergenaue räumliche Zuordnung.
- Bildverarbeitungssysteme: Kameras werden eingesetzt, um Fahrbahnmarkierungen, Verkehrszeichen und Orientierungspunkte für ein semantisches Verständnis zu identifizieren.
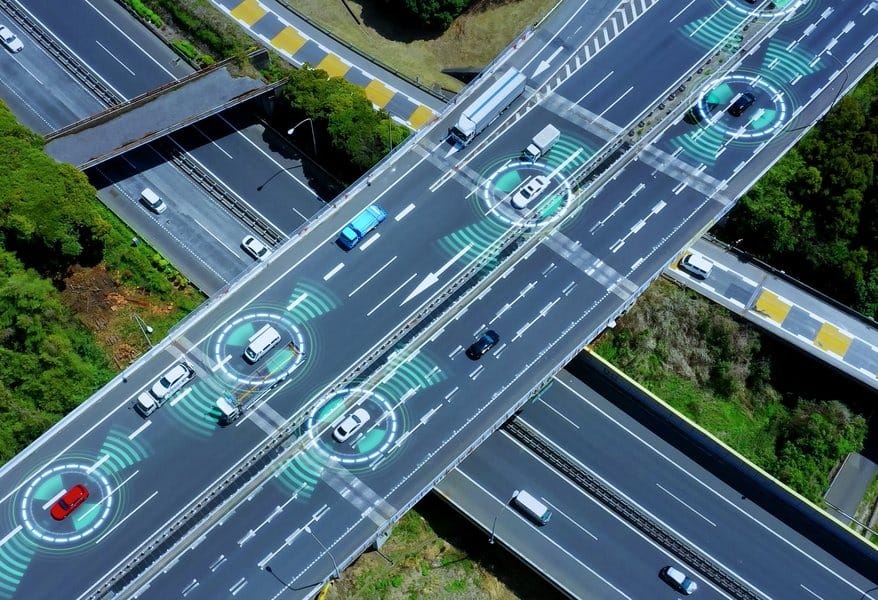
Zusammen bilden diese Systeme eine redundante, komplementäre Architektur , die eine präzise Lokalisierung unter komplexen Straßen-, Wetter- und Lichtverhältnissen gewährleistet. GNSS bleibt jedoch der Ausgangspunkt – und seine Grenzen verdeutlichen, warum die Fusion dieser Systeme unerlässlich ist.
Warum GNSS allein Autos nicht autonom machen kann
Standard -GPS bietet nur eine Genauigkeit von 1–3 m – für Smartphones ausreichend, aber fatal für autonome Fahrzeuge die Fahrbahnmarkierungen überfährt oder eine Abbiegekurve falsch interpretiert wird.
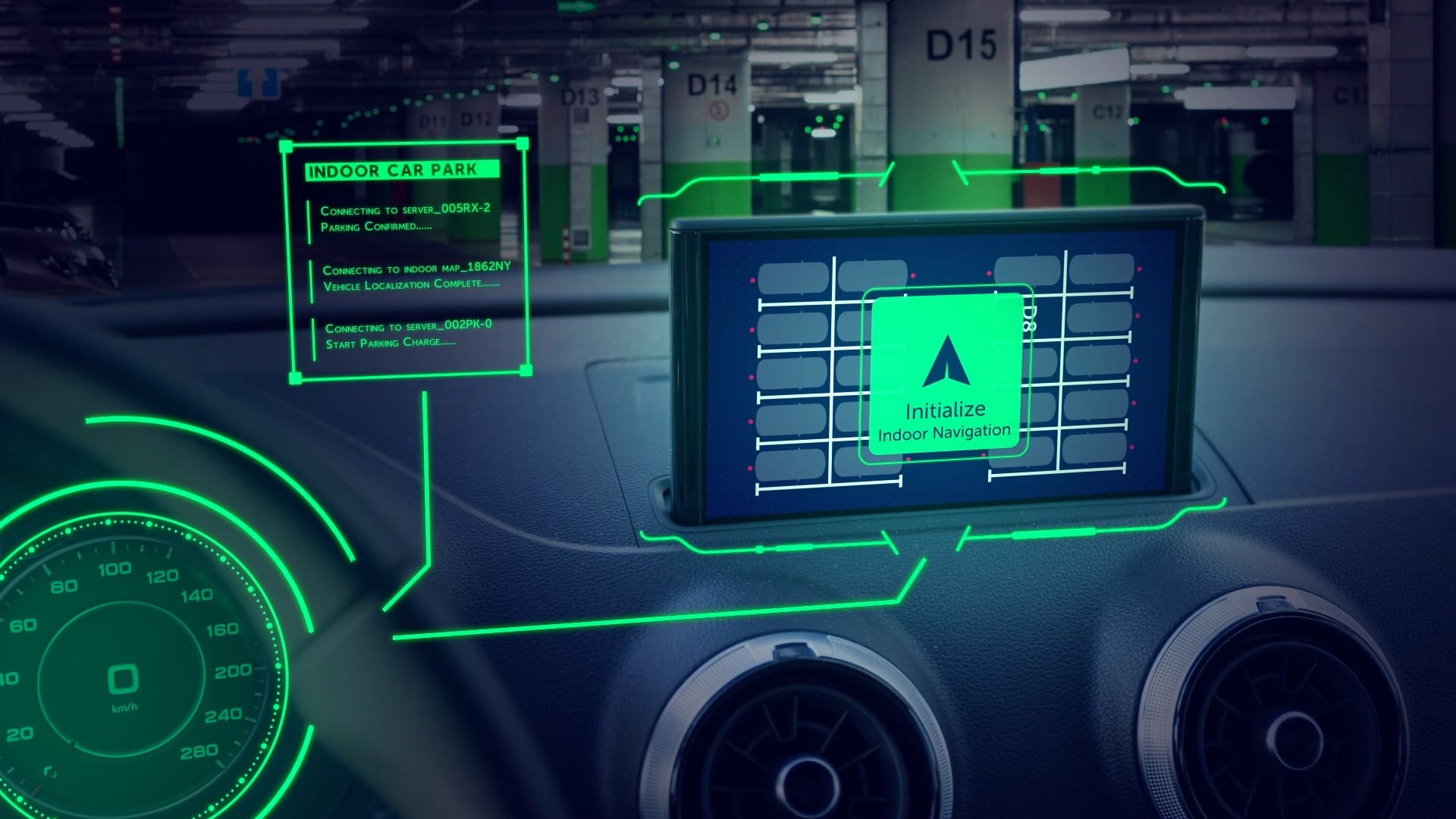
In Straßenschluchten oder Tunneln werden Signale reflektiert oder gehen vollständig verloren, was zu unregelmäßigen Aussetzern, sogenannten Mehrwegeausbreitungsfehlern . Diese Lücken machen reines GPS unzuverlässig und beweisen, dass autonome Systeme Sensorfusion für eine kontinuierliche, zentimetergenaue Lokalisierung benötigen .
Verbesserung der GNSS-Genauigkeit für autonomes Fahren
Zur Verbesserung der Standard -GPS- Leistung nutzen autonome Systeme erweiterte GNSS-Korrekturverfahren wie RTK . Durch den Empfang von Echtzeit-Fehlerdaten von Referenzstationen erreichen diese Systeme eine Genauigkeit von 5–10 cm und ermöglichen so die Positionierung auf Fahrspurebene .
GNSS jedoch weiterhin auf klare Sicht und stabile Kommunikation . In Tunneln oder städtischen Gebieten verschlechtern sich die Signale oder fallen ganz aus, was beweist, dass die Satellitenpositionierung allein nicht ausreicht und für eine kontinuierliche Lokalisierung INS .
Wenn GNSS ausfällt, hält INS das Fahrzeug auf dem Laufenden
Wenn Satelliten ausfallen, übernimmt das Trägheitsnavigationssystem (INS) die Steuerung. Mithilfe einer bordeigenen Trägheitsmesseinheit (IMU) erfasst es die Bewegung anhand von Beschleunigung und Winkelgeschwindigkeit – so kann das Fahrzeug seine Position auch ohne externe Signale präzise bestimmen.
Diese Unabhängigkeit macht INS zur Brücke durch Tunnel, Unterführungen oder Straßenschluchten. Allerdings akkumulieren sich Fehler mit der Zeit und führen zu einer allmählichen Drift LiDAR und Kameras korrigiert werden .
Im Inneren des INS: Der Kern der Trägheitslokalisierung
Das Trägheitsnavigationssystem (INS) ist das Herzstück der autonomen Lokalisierung – eine in sich geschlossene Navigationslösung, die es Fahrzeugen ermöglicht, ihre Position, Geschwindigkeit und Lage auch dann zu verfolgen, wenn externe Signale ausfallen.
Woraus besteht eine INS?
- Ein Satz aus drei Gyroskopen misst die Winkelgeschwindigkeit, um die Rotationsbewegung zu erfassen.
- Ein Satz aus drei Beschleunigungsmessern misst die lineare Beschleunigung über alle Achsen.
- Zusammen bilden diese Sensoren die Inertialmesseinheit (IMU) , die kontinuierlich jede noch so kleine Bewegung des Fahrzeugs in Echtzeit erfasst.
Wie das INS funktioniert
Lage, Geschwindigkeit und Position des Fahrzeugs relativ zu einem anfänglichen Referenzpunkt. Selbst bei Ausfall der GNSS-Signale schätzt das System die Bewegung weiterhin mittels Koppelnavigation und liefert so eine gleichmäßige und unterbrechungsfreie Lokalisierung.
Warum die Qualität von INS so wichtig ist
Die Genauigkeit eines INS hängt von der Sensorleistung ab – einschließlich Bias-Stabilität , Winkel-Random-Walk (ARW) und Temperaturkompensation . Ein hochwertiges INS gewährleistet über längere Zeiträume eine Präzision im Submeterbereich in Umgebungen ohne GNSS-Empfang und sichert so eine zuverlässige Navigation durch Tunnel, Städte und überdachte Strecken.
INS- und GNSS-Fusion: Der Goldstandard der Branche
Komplementäre Stärken
Keines der beiden Systeme kann allein perfekt funktionieren.
GNSS ermöglicht die globale Positionsbestimmung, verliert jedoch bei Signalstörungen an Zuverlässigkeit, während INS eine kontinuierliche Bewegungsverfolgung bietet, die sich mit der Zeit allmählich verschiebt.
Durch die Kombination beider Aspekte erreichen autonome Fahrzeuge absolute Genauigkeit und kurzfristige Stabilität .
Fusion in Aktion
Durch einen fortschrittlichen Kalman-Filter werden Daten von GNSS und INS in Echtzeit fusioniert:
- Wenn GNSS verfügbar ist, korrigiert es kontinuierlich die INS-Drift.
- Bei Ausfall des GNSS-Signals führt das INS so lange präzise Positionsaktualisierungen durch, bis die Satellitensignale zurückkehren.
Dieser Vorhersage-Aktualisierungs-Zyklus gewährleistet eine nahtlose und zuverlässige Lokalisierung – selbst in Tunneln oder dichten Stadtschluchten.
Industriestandard
Grundpfeiler der modernen autonomen Navigation geworden .
Ein gut kalibriertes GNSS/INS-System liefert unter dynamischen Bedingungen eine Genauigkeit im Zentimeterbereich und garantiert so Präzision und Zuverlässigkeit in allen Fahrumgebungen.
Von den Koordinaten zur Realität: Wie die Lokalisierungsmathematik funktioniert
Eine präzise Lokalisierung erfordert die Umrechnung von Daten zwischen zwei Koordinatensystemen: dem Fahrzeugkoordinatensystem , das sich mit dem Fahrzeug bewegt, und dem Kartenkoordinatensystem , das an der Erde fixiert ist. Mithilfe von Rotationsmatrizen oder Quaternionen werden Sensordaten wie Beschleunigung und Winkelgeschwindigkeit in ein globales Referenzsystem transformiert. Ohne diese Ausrichtung würden selbst hochpräzise Sensoren Bewegungen falsch erfassen, was zu Drift und Positionsfehlern führen würde.
Die Rolle von LiDAR bei der zentimetergenauen Präzision
Wenn GNSS die Sicht verliert, übernimmt LiDAR.
Im Gegensatz zur satellitengestützten Positionierung die LiDAR-Lokalisierung Echtzeit-3D-Scanning, um die Umgebung des Fahrzeugs zu „sehen“.
So funktioniert es:
- Das LiDAR-System sendet kontinuierlich Laserimpulse aus, um Punktwolken .
- Diese Scans werden mithilfe von Algorithmen wie ICP (Iterative Closest Point) oder NDT (Normal Distribution Transform) hochauflösenden Karte .
- Position und Ausrichtung des Fahrzeugs mit zentimetergenauer Präzision zu schätzen.
Warum das wichtig ist:
Dieses Verfahren gewährleistet eine zuverlässige Lokalisierung in Tunneln , Stadtschluchten oder bewaldeten Straßen , wo GNSS-Signale unzuverlässig sind oder vollständig verloren gehen.
Sehen heißt Glauben: Visuelle Lokalisierung und Fahrspurkartierung
Mit der Weiterentwicklung autonomer Fahrsysteme die visuelle Lokalisierung zu einer unverzichtbaren Ergänzung von GNSS und LiDAR geworden. Während Satelliten globale Reichweite bieten und LiDAR geometrische Präzision gewährleistet, liefern Kameras Kontext und Bedeutung – und ermöglichen es Fahrzeugen so, ihre Umgebung ähnlich wie Menschen zu interpretieren.
Die Rolle des Sehens bei der Lokalisierung
Visuelle Sensoren ermöglichen ein semantisches Verständnis der autonomen Navigation. Kameras erfassen Fahrbahnmarkierungen , Verkehrszeichen und Straßenbegrenzungen und liefern so einen umfassenden Kontext, der über die reine Geometrie hinausgeht.
Kernprozess
Die aufgenommenen Bilder werden mit einer hochauflösenden Karte . Algorithmen analysieren visuelle Merkmale und wenden probabilistische Schätzungsverfahren (wie z. B. Partikelfilterung) an, um die wahrscheinlichste Fahrzeugposition zu bestimmen.
Hauptvorteil
Im Gegensatz zu LiDAR, das Formen misst, interpretiert die visuelle Lokalisierung die Bedeutung. Sie ermöglicht eine Genauigkeit auf Fahrspurebene und verbessert die Robustheit bei wechselnden Licht-, Verkehrs- oder Wetterbedingungen.
Welche Herausforderungen schränken die Lokalisierung in der realen Welt noch immer ein?
Selbst mit fortschrittlicher Fusion von GNSS, IMU, LiDAR und Bildverarbeitung die Lokalisierung in der realen Welt weiterhin vor großen praktischen Herausforderungen. Perfekte Genauigkeit im Labor lässt sich nicht immer auf unvorhersehbare Straßen übertragen.
Dynamische Umgebungen
Straßenbauarbeiten, parkende Fahrzeuge, Fußgänger und temporäre Objekte verursachen Diskrepanzen zwischen Echtzeit-Sensordaten und vorab erstellten Karten. Diese Inkonsistenzen können kurzfristige Positionsfehler zur Folge haben.
Kartenpflege
Hochauflösende Karten erfordern ständige Aktualisierungen. Jahreszeitliche Veränderungen, Pflanzenwachstum oder kleinere Anpassungen des Straßenverlaufs können die Genauigkeit der Lokalisierung beeinträchtigen, wenn sie nicht in der Datenbank berücksichtigt werden.
Sensorkalibrierung
Eine präzise Datenfusion setzt die exakte Ausrichtung von LiDAR-Systemen, Kameras und IMUs voraus. Selbst mechanische Verschiebungen im Millimeterbereich oder thermische Ausdehnungen können zu Winkelabweichungen führen und eine kumulative Drift .
Warum die IMU-Qualität die Zukunft der autonomen Navigation bestimmt
Die Inertialmesseinheit (IMU) ist die letzte Sicherheitsmaßnahme für die autonome Lokalisierung. Wenn GNSS und die Sichtverbindung ausfallen, sorgt sie allein dafür, dass das Fahrzeug seine tatsächliche Bewegung weiterhin erkennt. Die Stabilität eines jeden autonomen Fahrsystems hängt davon ab, wie präzise die IMU die Orientierung über die Zeit messen und beibehalten kann.
Hochwertige IMUs zeichnen sich durch Bias-Stabilität , Angle Random Walk (ARW) und thermische Kompensation . Diese Parameter bestimmen, wie lange das System ohne externe Korrektur eine präzise Koppelnavigation aufrechterhalten kann. Während Sensoren für Endverbraucher innerhalb von Sekunden um mehrere Meter abweichen können, taktische IMUs die Genauigkeit im Submeterbereich über mehrere Minuten – der entscheidende Unterschied zwischen Navigation und Orientierungslosigkeit.
Mit fortschreitender Autonomie bleibt die IMU deren Grundlage. Zukünftige Systeme werden die Inertialsensorik mit KI-gestützter Datenfusion und adaptiver Modellierung , doch wahre Zuverlässigkeit beruht weiterhin auf einem Kernprinzip: Die Qualität der Bewegungserfassung bestimmt die Zuverlässigkeit der Navigation.
