Hochpräzise MEMS-IMUs weisen nach der Integration häufig Leistungseinbußen auf. Drift, Fehlausrichtung und Umwelteinflüsse beeinträchtigen die Genauigkeit schleichend – bis es zu Ausfällen im Feld kommt. Um die volle Präzision zu erhalten, sollten vier Regeln befolgt werden: exakte Ausrichtung, kontrollierte Umgebung, regelmäßige Kalibrierung und disziplinierter Betrieb.
Hochpräzise MEMS-IMUs bieten eine unübertroffene Bewegungserkennungsleistung – jedoch nur bei korrekter Anwendung. Dieser Artikel zeigt vier kritische Anwendungsfehler auf, die häufig zu Genauigkeitseinbußen führen, und wie diese in der Praxis vermieden werden können.
Hochpräzise MEMS-IMUs bilden das Rückgrat moderner Navigationssysteme – von Drohnen bis hin zu autonomen Fahrzeugen. Doch selbst Premium-Sensoren versagen bei unsachgemäßer Handhabung. Dieser Leitfaden deckt die versteckten Fallstricke auf, die die Genauigkeit unbemerkt beeinträchtigen, und zeigt Systemintegratoren, wie sie diese vermeiden können.
Inhaltsverzeichnis
Installation: Der Ausgangspunkt jeder hochpräzisen MEMS-IMU
Montieren Sie es fest – nicht locker
Ein MEMS-IMU erfasst ausschließlich seine eigene Bewegung und muss sich daher exakt mit der Plattform bewegen. Für zuverlässige Ergebnisse befestigen Sie das Gerät mit Metall- oder Kohlefaserhalterungen direkt an einer starren Struktur. Vermeiden Sie Gummipads oder andere weiche Materialien, die sich biegen oder Vibrationen absorbieren – sie unterbrechen die mechanische Verbindung und verfälschen die Sensordaten.
Ist eine Schwingungsisolierung unvermeidbar, muss diese sorgfältig ausgelegt werden. Es muss sichergestellt werden, dass die Dämpfungseigenschaften die Ausgangsfrequenz oder Phasenantwort des IMU nicht verfälschen.
Richten Sie die Achsen perfekt aus
Bereits geringe Winkelabweichungen können erhebliche Positionsfehler verursachen. Bei einer Fehlausrichtung eines hochpräzisen MEMS-IMU um nur ein Grad kann die resultierende Drift nach längerem Betrieb Kilometer betragen. Richten Sie die Achsen des IMU daher stets am Bezugssystem des Fahrzeugs aus oder führen Sie nach der Installation eine präzise Ausrichtungskalibrierung durch.
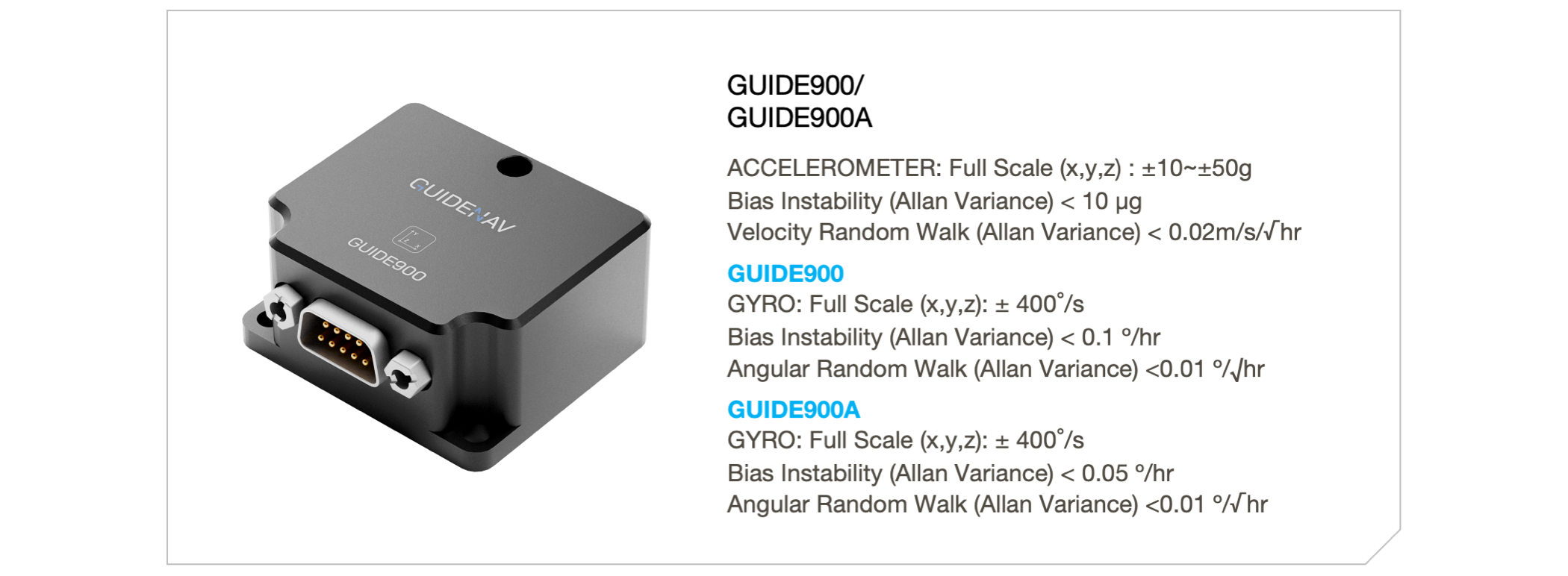
Die GuideNav MEMS IMU GUIDE900 ist werkseitig kalibriert mit einer Skalierungsfaktor-Nichtlinearität von weniger als 100 ppm und einer Kopplung zwischen den Achsen unter 200 ppm – doch eine mangelhafte Ausrichtung bei der Installation kann diese Präzision schnell zunichtemachen.
Meiden Sie Vibrations- und Stresszonen
Kontinuierliche Vibrationen oder strukturelle Belastungen verändern allmählich die internen Eigenschaften eines MEMS-IMU. Vermeiden Sie die Montage des Sensors in der Nähe von Motoren, Getrieben oder Schweißverbindungen. Diese mechanischen Einflüsse können mit der Zeit zu einer Abweichung der Messgenauigkeit führen und die Langzeitstabilität beeinträchtigen.
Umgebungssteuerung: Der versteckte Feind der IMU-Genauigkeit
Temperaturstabilität ist alles
Die Temperatur ist die häufigste Ursache für Drift bei hochpräzisen MEMS-IMUs. Jeder Sensor hat einen definierten thermischen Betriebsbereich – typischerweise −40 °C bis +85 °C. Plötzliche Schwankungen können den Nullpunkt oder den Skalierungsfaktor verschieben.
Halten Sie die MEMS-IMU in einer stabilen Umgebung, indem Sie sie gegebenenfalls isolieren, die Luftzirkulation steuern oder Heizelemente einsetzen. Alle GuideNav MEMS-IMUs sind über den gesamten Bereich temperaturkompensiert und gewährleisten so eine gleichbleibende Genauigkeit auch unter extremen Bedingungen.
Feuchtigkeit kann die Präzision unbemerkt beeinträchtigen
Feuchtigkeit stellt eine weitere unsichtbare Gefahr dar. Bei einer relativen Luftfeuchtigkeit von über 85 % kann sie in das Gehäuse eindringen, Schaltkreise korrodieren und das Verhalten des Sensors verändern. Selbst kurzzeitige Kondensation kann vorübergehende Bias-Sprünge auslösen. Schützen Sie die hochpräzise IMU in einem abgedichteten Gehäuse stets mit Trockenmitteln, wenn Sie sie in maritimen oder tropischen Klimazonen betreiben.
Vermeiden Sie elektromagnetische Störungen (EMI)
Hochstromleitungen und Schaltnetzteile können Störungen in den analogen Eingangsbereich einer MEMS-IMU einspeisen. Um diese Störungen zu vermeiden, trennen Sie die Stromleitungen von den Signalleitungen, sorgen Sie für eine ordnungsgemäße Erdung und verwenden Sie abgeschirmte Kabel. Eine störungsfreie elektromagnetische Umgebung ist für die langfristige Präzision ebenso wichtig wie die mechanische Stabilität.
Kalibrierung: Die Lebensader einer hochpräzisen MEMS-IMU
Die Werkskalibrierung hält nicht ewig .
Jede MEMS-IMU verlässt das Werk kalibriert hinsichtlich Bias, Skalierungsfaktor und Orthogonalität – diese Parameter verändern sich jedoch im Laufe der Zeit durch Temperaturschwankungen, Vibrationen und mechanische Belastung. Um die spezifikationsgemäße Leistung einer hochpräzisen IMU zu gewährleisten, sollte eine regelmäßige Neukalibrierung alle 6–12 Monate oder bei missionskritischen Systemen auch häufiger durchgeführt werden.
Wählen Sie den richtigen Kalibrierungsansatz
Wenn das Entfernen der IMU nicht praktikabel ist, führen Sie eine On-Board- oder Echtzeitkalibrierung mit Hilfe statischer Ausrichtungsroutinen oder GNSS-gestützter Schätzung durch.
Die vollständige Wiederherstellung der Präzision erfordert jedoch eine Laborkalibrierung auf einem Messtisch oder in einer Klimakammer. Dieses Verfahren korrigiert alle sechs Achsen und kompensiert temperaturabhängige Drift, wodurch sichergestellt wird, dass die MEMS-IMU in jeder Umgebung ihre taktische Leistungsfähigkeit beibehält.
Überprüfen Sie stets das Ergebnis
Die Kalibrierung ist erst nach der Verifizierung abgeschlossen. Vergleichen Sie die Daten nach der Kalibrierung mit Referenzbewegungsprofilen oder Referenzsensoren, um Stabilität und Genauigkeit zu bestätigen.
Wird die Überprüfung vernachlässigt, können versteckte Fehler zurückbleiben, die die Leistung unbemerkt beeinträchtigen – und damit den Zweck der Neukalibrierung zunichtemachen.
Bedienung und Handhabung: Präzision steckt im Detail
Bevor Sie den Daten vertrauen, sollten Sie sich erst einmal aufwärmen
Ein MEMS-IMU benötigt nach dem Einschalten Zeit, um thermische und elektronische Stabilität zu erreichen. Die meisten hochpräzisen IMUs benötigen je nach Modell und Umgebung eine Aufwärmphase von 1–30 Minuten. Eine zu frühe Datenerfassung kann zu einer vorübergehenden Abweichung führen, die um ein Vielfaches höher ist als der Nennwert.
Vermeiden Sie häufiges Ein- und Ausschalten
Das wiederholte Ein- und Ausschalten der IMU setzt deren interne Filter zurück und führt zu vorübergehenden Bias-Änderungen. Um eine gleichbleibende Leistung und nahtlose Datenkontinuität zu gewährleisten, muss die MEMS-IMU während der kritischen Datenerfassung kontinuierlich mit Strom versorgt werden.
Vorsichtig behandeln – immer
Trotz ihrer robusten Bauweise enthalten hochpräzise MEMS-IMUs empfindliche Mikrostrukturen. Stürze, Stöße oder unsachgemäße Handhabung können zu einer schleichenden, aber dauerhaften Beeinträchtigung der Genauigkeit führen. Verwenden Sie beim Transport gepolsterte Behälter und sichern Sie die Steckverbinder. Überprüfen Sie regelmäßig Kabel, Halterungen und Gehäuse – mechanische Belastung oder lose Verkabelung gehen häufig einer Sensordrift voraus.

GuideNav-Experteneinblicke
Wir bei GuideNav haben erlebt, wie ein einfacher Fehler – mangelhafte Montage, unterlassene Kalibrierung oder thermische Drift – einen hochpräzisen MEMS-IMU in einen unzuverlässigen Sensor verwandeln kann. Die Integration in die Praxis hängt nicht nur von den technischen Daten ab, sondern erfordert Disziplin bei Installation, Kalibrierung und langfristiger Wartung.
Deshalb wurden die GuideNav MEMS-IMUs für professionelle Systemintegratoren entwickelt, die auf gleichbleibende, praxiserprobte Genauigkeit Wert legen. Jede Einheit ist vollständig temperaturkompensiert, orthogonal kalibriert und durch ein robustes Aluminiumgehäuse geschützt, das selbst härtesten Vibrationen und Umgebungsbedingungen standhält.
Ob es sich bei Ihrem Projekt um UAVs, autonome Fahrzeuge oder Industrieroboter handelt – die Anwendung der richtigen Verfahren sorgt dafür, dass Ihre MEMS-IMU genau so funktioniert, wie sie konzipiert wurde: stabil, zuverlässig und bereit für missionskritische Aufgaben.
