Inhaltsverzeichnis
- Was ist ein FOG?
- Was sind die grundlegenden Komponenten eines FOG?
- Visuelle Aufschlüsselung der FOG-Komponenten
- Häufige Anwendungen von faseroptischen Gyroskopen (FOGs)
- Warum faseroptische Gyroskope (FOGs) in Navigations- und Positionierungssystemen von entscheidender Bedeutung sind
- Praktische Vorteile von FOGs in Navigations- und Positionierungssystemen
- Bias-Instabilität
- Drift
- Größe, Leistung und Kosteneffizienz
- Umweltresilienz und Außenanwendung
- Dynamikbereich
- Bias-Instabilität
- Angle Random Walk (ARW)
- Linearität und Wiederholbarkeit des Skalenfaktors
- Temperaturkompensationsbereich
- Definieren Sie Ihre Bewerbungsanforderungen
- Priorisierung der Anforderungen an Bias-Instabilität und Drift
- Berücksichtigen Sie den Dynamikbereich und den Winkel-Random-Walk
- Temperaturkompensationsbereich auswerten
- Ausgewogene Berücksichtigung von Größe, Leistung und Kosten
- Vergleich der GuideNav FOG-Modelle
- Links zu verwandten Artikeln
Einführung
Herkömmliche Gyroskope sind zwar in manchen Anwendungsbereichen brauchbar, stoßen aber in rauen Umgebungen oder bei geschäftskritischen Anwendungen oft an ihre Grenzen. Hier spielen Faseroptikgyroskope (FOGs) ihre Stärken voll aus. Ich bin seit über 15 Jahren in diesem Bereich tätig und kann Ihnen versichern, dass nur wenige Technologien mit der Zuverlässigkeit von FOGs mithalten können, wenn es auf Genauigkeit, Langlebigkeit und Stabilität ankommt.
In diesem umfassenden Leitfaden erkläre ich Ihnen die Grundlagen von FOGs, ihre Kernkomponenten und wie Sie das richtige Gerät für Ihre Bedürfnisse auswählen. Lesen Sie weiter, um die bahnbrechenden Möglichkeiten der FOG-Technologie zu verstehen und zu erfahren, wie sie sich von herkömmlichen Gyroskopen unterscheidet. Außerdem erfahren Sie, welche Faktoren Sie bei der Auswahl eines FOG für Ihre spezifische Anwendung berücksichtigen sollten.
Was ist ein faseroptisches Gyroskop (FOG)?
Ein faseroptisches Gyroskop (FOG) ist ein Präzisionssensor, der Rotationen mithilfe des Sagnac-Effekts misst. Dabei erfasst Licht in gewickelten optischen Fasern Änderungen der Winkelgeschwindigkeit. Dieses nicht-mechanische Gyroskop bietet hohe Stabilität und Genauigkeit auch unter anspruchsvollen Bedingungen und eignet sich daher ideal für Anwendungen wie die Luft- und Raumfahrtnavigation, die Satellitenlageregelung, Robotik und autonome Fahrzeuge.
Im Gegensatz zu herkömmlichen Gyroskopen, die auf rotierenden Bauteilen basieren, sind FOGs Halbleiterbauelemente. Sie sind von Natur aus robuster und widerstehen starken Vibrationen, Stößen und Temperaturschwankungen. Diese Stabilität macht FOGs in Bereichen, in denen zuverlässige und langfristige Genauigkeit entscheidend ist, unverzichtbar.

Was sind die grundlegenden Komponenten eines FOG?
Die grundlegenden Komponenten eines faseroptischen Gyroskops (FOG) sind faszinierend präzise und effizient und liefern exakte Winkelgeschwindigkeitsmessungen mit minimaler Drift. In meiner langjährigen Tätigkeit in dieser Branche hatte ich unzählige Male Gelegenheit, diese Komponenten zu analysieren, und jede einzelne spielt eine entscheidende Rolle für die Funktion des FOG. Ich möchte Ihnen die wesentlichen Bestandteile eines FOG vorstellen und erklären, warum sie so wichtig für seine Funktion sind.
| Komponente | Beschreibung | Funktion |
|---|---|---|
| Optische Faserspule | Eine lange, aufgewickelte optische Faser, in der sich das Licht in entgegengesetzte Richtungen ausbreitet, um eine Drehung zu erkennen. | Erkennt Phasenverschiebungen und ermöglicht so eine präzise Rotationsmessung. |
| Laserdiode | Die Lichtquelle, typischerweise ein stabiler Laser, der kohärentes Licht erzeugt. | Liefert die für genaue Messungen erforderlichen gleichmäßigen Lichtstrahlen. |
| Strahlteiler und Koppler | Vorrichtungen, die das Laserlicht in zwei Strahlen aufteilen und diese durch die Spule leiten. | Lenkt Lichtstrahlen in entgegengesetzte Richtungen, um Interferenzmessungen durchzuführen. |
| Fotodetektor | Ein Sensor, der das zurückkehrende Licht auffängt, nachdem es die Spule durchlaufen hat. | Erkennt jegliche Phasenverschiebung, die durch Rotation verursacht wird. |
| Signalverarbeitungseinheit | System zur Umwandlung von Phasenverschiebungsdaten in nutzbare Winkelgeschwindigkeitsinformationen. | Verarbeitet Daten für Echtzeit-Rotationsrückmeldung. |
Nun wollen wir uns jedes einzelne Detail etwas genauer ansehen.
1. Optische Faserspule
Die optische Faserspule ist das Herzstück eines FOG (Focused Optical Gating System), hier findet die eigentliche Magie statt. Diese Spule ist üblicherweise mehrere hundert Meter lang und eng gewickelt. Die Faser ermöglicht es Lichtstrahlen, sich in entgegengesetzte Richtungen auszubreiten, wodurch ein hochempfindliches Messsystem zur Rotationserkennung mittels des Sagnac-Effekts .
Die Länge und Qualität der Faser beeinflussen die Genauigkeit des FOG direkt. Längere Faserspulen bieten typischerweise eine höhere Empfindlichkeit gegenüber Rotationen, da sie die Distanz vergrößern, über die die Phasenverschiebung auftreten kann.
Beispiel : Hochwertige FOGs verwenden unter Umständen bis zu 1 km Faser, die zu einer kompakten, stabilen Spule gewickelt ist, um eine extrem niedrige Drift zu erreichen.
2. Laserdiode
Die Laserdiode dient als Lichtquelle des FOG. Sie emittiert einen stabilen, kohärenten Strahl, der für präzise Phasenmessungen unerlässlich ist. Die Stabilität und Konsistenz dieses Lasers sind von entscheidender Bedeutung, da jede Abweichung in der Lichtquelle Rauschen verursachen und die Genauigkeit des Gyroskops beeinträchtigen könnte.
Technischer Einblick : Die Wellenlängenstabilität des Lasers beeinflusst direkt die Phasenverschiebungsdetektion. Aus diesem Grund verwenden viele FOGs Laser mit strenger Wellenlängenkontrolle, um konsistente Messwerte zu gewährleisten.
3. Strahlteiler und Koppler
Der Strahlteiler teilt das Laserlicht in zwei identische Strahlen. Ein Strahl verläuft im Uhrzeigersinn, der andere gegen den Uhrzeigersinn durch die Glasfaser. Koppler lenken diese Strahlen anschließend in die Glasfaserspule. Diese Komponenten müssen präzise ausgerichtet sein, um sicherzustellen, dass jeder Strahl den korrekten Weg ohne Verluste oder Interferenzen durchläuft.
Praxisbeispiel : In Anwendungen der Verteidigungs- oder Luft- und Raumfahrt werden Strahlteiler und -koppler sorgfältig ausgewählt und getestet, um die Ausrichtung auch unter rauen Bedingungen wie starken Vibrationen oder extremen Temperaturen aufrechtzuerhalten.
4. Fotodetektor
Der Fotodetektor erfasst die beiden Lichtstrahlen beim Austritt aus der Faserspule. Er misst dabei jegliche Phasendifferenz zwischen den im Uhrzeigersinn und gegen den Uhrzeigersinn rotierenden Strahlen – eine Differenz, die die Rotationsgeschwindigkeit angibt. Dieses Bauteil muss hochempfindlich sein, um selbst kleinste Phasenverschiebungen, die oft im Nanometerbereich liegen, zu erfassen.
Experten-Tipp : Ein hochwertiger Fotodetektor ist für Anwendungen mit geringen Anforderungen an die Drift unerlässlich. Selbst geringfügige Ungenauigkeiten bei der Phasendetektion können sich mit der Zeit summieren und die Stabilität des FOG beeinträchtigen.
5. Signalverarbeitungseinheit
Die Signalverarbeitungseinheit ist der Ort, an dem die Daten aussagekräftig werden. Sie wandelt die vom Fotodetektor erfasste Phasenverschiebung in eine Rotationsrate um und verwendet dabei häufig fortschrittliche Algorithmen, um Rauschen zu filtern und präzise Messwerte zu liefern. Diese verarbeiteten Daten werden dann in Echtzeit an das System ausgegeben.
Für Präzisionsanwendungen sind Signalprozessoren häufig mit Fehlerkompensationsalgorithmen ausgestattet. Dadurch kann sich das FOG selbst korrigieren und Umwelteinflüsse berücksichtigen, die die Genauigkeit beeinträchtigen könnten.
| Nummer | Inhalt |
|---|---|
| 01 | Rekursives Kleinste-Quadrate-Verfahren, Herleitung der Kalman-Filtergleichungen |
| 02 | Diskretisierung von kontinuierlichen Systemen, Kalman-Filterung im kontinuierlichen Zeitbereich, Kalman-Filterung unter Rauschkorrelationsbedingungen, sequentielle Filterung |
| 03 | Informationsfilterung und Informationsfusion, Quadratwurzelfilterung |
| 04 | Vergessensfilterung, adaptive Filterung, Messfehlererkennung und robuste Tracking-Filterung, Filterglättung, erweiterte Kalman-Filterung/Filterung zweiter Ordnung/iterative Filterung |
| 05 | Unscented Kalman Filtering, Federated Filtering |
| 06 | Filterstabilitätsanalyse, Fehlerverteilungs- und Beobachtbarkeitsanalyse der Zustandschätzung, Schätzung mit minimaler Varianz und lineare Schätzung mit minimaler Varianz |
| 07 | Maximum-Likelihood-Schätzung, Maximum-A-Posteriori-Schätzung, gewichtete Kleinste-Quadrate-Schätzung, Wiener-Filterung, rekursive Bayes-Schätzung, Strapdown-Trägheitsnavigation, Abschnitt: Vektoren und ihre schiefsymmetrischen Matrizen, Richtungskosinusmatrizen, äquivalente Rotationsvektoren |
| 08 | Differentialgleichungen von Lagematrizen und ihre Lösungen, Differentialgleichungen von Quaternionen und ihre Lösungen, Differentialgleichungen von äquivalenten Rotationsvektoren und ihre Taylorreihenlösungen |
| 09 | Multi-Subsample-Optimierungsalgorithmen unter Bedingungen konischer Bewegung, Erdform und Gravitationsfeld |
| 10 | Vollständige numerische Aktualisierungsalgorithmen für Strapdown-Trägheitsnavigation, Fehlerfortpflanzungsgleichungen, Anfangsausrichtung, SINS/GNSS-integrierte Navigation |
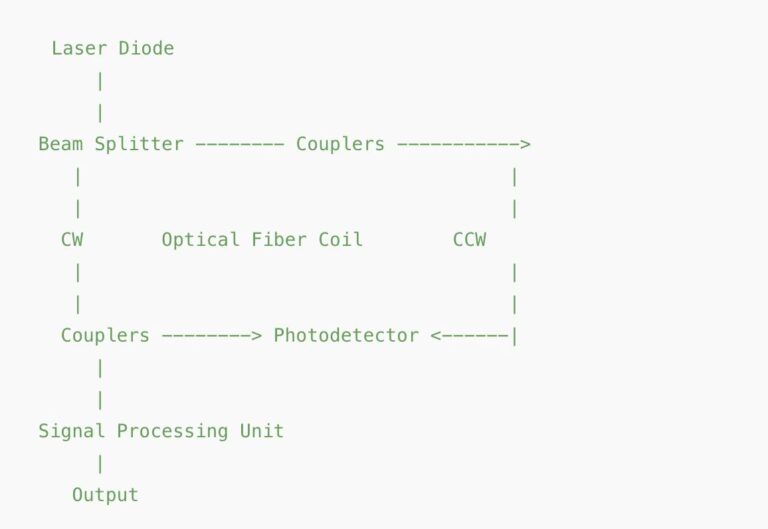
Visuelle Aufschlüsselung der FOG-Komponenten
Hier ist ein vereinfachtes Diagramm, das veranschaulicht, wie diese Komponenten in einem FOG interagieren:
Häufige Anwendungen von faseroptischen Gyroskopen (FOGs)
| Anwendungsgebiet | Spezielle Anwendungsgebiete | Wichtigste FOG-Vorteile in diesem Bereich |
|---|---|---|
| Luft- und Raumfahrt | Flugzeugnavigation, Satellitenstabilisierung | Hohe Genauigkeit, geringe Drift, Robustheit unter extremen Bedingungen |
| Verteidigung & Militär | Raketenlenkung, Panzernavigation, unbemannte Luftfahrzeuge und Drohnen | Stoßfestigkeit, Zuverlässigkeit, präzise Ausrichtung |
| Marine & U-Boote | Unterwassernavigation, ROVs, Schiffe | Geringer Wartungsaufwand, hohe Genauigkeit in GPS-freien Umgebungen |
| Autonome Fahrzeuge | Selbstfahrende Autos, Industriedrohnen | Genaue, driftfreie Ausrichtung, entscheidend für komplexe Umgebungen |
| Industrierobotik | Roboterarme, automatisierte Maschinen | Präzision und Stabilität bei Hochgeschwindigkeitsbetrieb |
1. Luft- und Raumfahrt
FOGs sind in der Luftfahrt unverzichtbar geworden, wo Zuverlässigkeit und Präzision unerlässlich sind. In Flugzeugen beispielsweise müssen Navigation und Orientierung unabhängig von schnellen Höhenänderungen oder Turbulenzen stabil bleiben. Dank ihrer geringen Drift und hohen Präzision liefern FOGs konsistente Daten, die für Flugsteuerungssysteme unerlässlich sind. In Satelliten erhalten FOGs die Orientierung im Vakuum des Weltraums aufrecht, wo Temperatur- und Vibrationsbeständigkeit von entscheidender Bedeutung sind.
- Hauptmerkmale für die Luftfahrt:
- Geringe Drift gewährleistet Datengenauigkeit auch über längere Flugzeiten.
- Die Temperaturresistenz gleicht extreme Höhenschwankungen aus.
- Eine lange Betriebsdauer verringert den Wartungsaufwand, was insbesondere bei Anwendungen in großen Höhen oder im Orbit von entscheidender Bedeutung ist.

2. Verteidigung & Militär
Aus meiner Erfahrung mit militärischen Anwendungen kann ich sagen, dass FOGs im Verteidigungsbereich unersetzlich sind. Sie liefern entscheidende Steuerungsdaten für alles, von gepanzerten Fahrzeugen und Panzern bis hin zu Raketen und Drohnen. FOGs sind so konstruiert, dass sie starken Stößen und Vibrationen standhalten und sich daher für die schnellen Manöver und die risikoreichen Szenarien eignen, die in Militäroperationen üblich sind.
- Hauptmerkmale für die Verteidigung:
- Die hohe Stoßfestigkeit gewährleistet die Betriebsstabilität auch unter extremen Belastungen.
- Präzise Lenkung verbessert die Zielgenauigkeit von Raketen und Drohnen.
- Zuverlässigkeit unter extremen Umweltbedingungen ist für militärische Missionen unerlässlich.
3. Anwendungen im Bereich Marine und U-Boote
In den Tiefen des Ozeans versagen herkömmliche Navigationsinstrumente wie GPS. FOGs hingegen behalten ihre Präzision und Stabilität auch in GPS-freien Umgebungen bei und sind daher unverzichtbar für Tauchboote, ferngesteuerte Unterwasserfahrzeuge (ROVs) und Schiffe. Da diese Systeme oft über lange Zeiträume an abgelegenen Orten im Einsatz sind, machen der geringe Wartungsaufwand und die Unempfindlichkeit gegenüber Druckschwankungen FOGs zur idealen Wahl.
- Hauptmerkmale für Marine:
- Unabhängig von GPS- Signalen, ermöglicht dies eine zuverlässige Navigation unter Wasser.
- ihren geringen Wartungsaufwand eignen sie sich für Langzeiteinsätze.
- Umweltresilienz schützt vor Korrosion und Druckschwankungen bei Tiefseeoperationen.

4. Autonome Fahrzeuge
Für autonome Fahrzeuge – ob am Boden, in der Luft oder unter Wasser – müssen Navigationssysteme sowohl hochpräzise als auch driftresistent sein. Bei selbstfahrenden Autos sind beispielsweise präzise Orientierungsdaten entscheidend, um eine stabile Fahrspur zu halten, Hindernisse zu erkennen und auf plötzliche Bewegungen zu reagieren. Auch Drohnen und andere industrielle UAVs nutzen FOGs (Focused Orientation Systems), um selbst bei schnellen Manövern eine stabile Orientierung zu gewährleisten.
- Hauptmerkmale für autonome Fahrzeuge:
- Eine stabile, driftfreie Ausrichtung ermöglicht eine gleichbleibende Navigation in dynamischen Umgebungen.
- Schnelle Reaktionszeiten sind für blitzschnelle Anpassungen in Echtzeit unerlässlich.
- Das kompakte Design ermöglicht die einfache Integration in verschiedene autonome Plattformen.
5. Industrierobotik
In der Robotik spielen FOGs eine wichtige Rolle bei der Verbesserung der Präzision und Stabilität von Robotersystemen, insbesondere bei solchen, die in Hochgeschwindigkeits- oder risikoreichen Anwendungen eingesetzt werden. Ob es sich um einen Roboterarm handelt, der filigrane Montagearbeiten durchführt, oder um automatisierte Maschinen, die schwere Lasten handhaben – FOGs liefern das stetige und präzise Feedback, das für die Kontrolle unerlässlich ist.
- Hauptmerkmale für Roboter:
- Präzisionsdaten ermöglichen eine genaue Positionierung bei Aufgaben, die eine präzise Steuerung erfordern.
- Hohe Stabilität ist entscheidend für eine gleichbleibende Leistung bei schnellen, sich wiederholenden Bewegungen.
- Langlebigkeit reduziert den Wartungsaufwand und hält die Betriebskosten niedrig.

Warum faseroptische Gyroskope (FOGs) in Navigations- und Positionierungssystemen von entscheidender Bedeutung sind
1. Unübertroffene Präzision und Stabilität
FOGs sind für höchste Genauigkeit ausgelegt. Im Gegensatz zu herkömmlichen Gyroskopen, bei denen sich mit der Zeit eine Drift ansammeln kann, weisen FOGs extrem niedrige Driftraten auf, was für Langzeitanwendungen unerlässlich ist. In Bereichen wie der Luft- und Schifffahrt können sich kleine Fehler schnell summieren und zu erheblichen Abweichungen führen. FOGs mit einer Bias-Instabilität von oft unter 0,001°/h bieten die Präzision, die erforderlich ist, um Systeme über lange Zeiträume auf Kurs zu halten.
| Leistungskennzahl | Faseroptische Gyroskope (FOGs) | Traditionelle Gyroskope |
|---|---|---|
| Drift | Minimale Drift (±0,001°/h) | Hohe Drift im Laufe der Zeit |
| Langzeitstabilität | Konsistent | Verschlechtert sich durch mechanischen Verschleiß |
| Eignung | Ideal für Langzeitmissionen | Auf kurze Zeiträume beschränkt |
2. Zuverlässigkeit in GPS-freien Umgebungen
Einer der überzeugendsten Gründe für den Einsatz von FOGs ist ihre Zuverlässigkeit bei schwachen oder nicht verfügbaren GPS-Signalen, beispielsweise in der Tiefsee, in dicht besiedelten Stadtgebieten oder sogar im Weltraum. In solchen Szenarien ist die Koppelnavigation – bei der das System die aktuelle Position anhand der zuletzt bekannten Position und Bewegung berechnet – unerlässlich. FOGs liefern die stabilen, kontinuierlichen Orientierungsdaten, die Navigationssysteme präzise halten, ohne dass ein externes Signal erforderlich ist.
Nehmen wir beispielsweise U-Boote. Diese operieren häufig außerhalb der GPS-Reichweite. Hier ermöglichen FOGs die präzise, autonome Navigation, die für einen sicheren Betrieb in GPS-freien Umgebungen erforderlich ist.
3. Umweltresilienz
In der Luft- und Raumfahrt sowie im Militärbereich sind die Umgebungsbedingungen alles andere als vorhersehbar. Schnelle Temperaturänderungen, Vibrationen und Stöße gehören zu den ständigen Herausforderungen. FOGs (Functional Occlusion Sensors) sind gegenüber diesen Faktoren äußerst widerstandsfähig. Dank ihrer Halbleiterbauweise – sie besitzen also keine beweglichen Teile – sind sie im Vergleich zu mechanischen Gyroskopen deutlich weniger verschleißanfällig.
| Umweltfaktor | Faseroptische Gyroskope (FOGs) | Mechanische Gyroskope |
|---|---|---|
| Temperatur | Toleranz gegenüber extremen Schichtwechseln | Begrenztes Sortiment |
| Vibration | Hoher Widerstand | Die Leistungsfähigkeit verschlechtert sich bei Stößen |
| Schock | Ausgezeichnete Widerstandsfähigkeit | Risiko eines mechanischen Versagens |
4. Minimaler Wartungsaufwand und lange Betriebsdauer
FOGs bieten eine lange Lebensdauer bei praktisch keinem Wartungsaufwand. Dies ist ein wesentlicher Vorteil für Systeme, die an abgelegenen oder schwer zugänglichen Orten eingesetzt werden, wie beispielsweise Satelliten oder Militärdrohnen. Da FOGs keine beweglichen Teile besitzen, besteht kaum ein Risiko von mechanischem Verschleiß. Dadurch sind sie eine wartungsarme Lösung, die die Gesamtbetriebskosten senkt.
Praktische Vorteile von FOGs in Navigations- und Positionierungssystemen
Fassen wir zusammen, wie FOGs zentrale Herausforderungen in verschiedenen Umgebungen lösen:
| Umfeld | Probleme konventioneller Systeme | Lösung gegen Beschlag |
|---|---|---|
| Tiefseeoperationen | GPS nicht verfügbar, Drift nimmt schnell zu | Daten mit geringer Drift ermöglichen eine genaue Koppelnavigation |
| Weltraumforschung | Extreme Temperaturschwankungen, Signalverlust | Zuverlässige Daten, Temperaturbeständigkeit |
| Stadtnavigation | GPS-Signalverlust in dicht besiedelten Gebieten | Kontinuierliche Daten ohne Abhängigkeit von externen Signalen |
| Militärische Feldoperationen | Stöße und Vibrationen beeinträchtigen die Genauigkeit | Stoßfest, stabile Leistung |
FOG vs. hochpräzises MEMS-Gyroskop: Ein umfassender Vergleich
1. Bias-Instabilität
Die Bias-Instabilität ist ein Maß für die Stabilität der Gyroskop-Vorspannung über kurze Zeiträume, üblicherweise im Bereich von Sekunden bis Minuten. Moderne, hochpräzise MEMS-Gyroskope erreichen Bias-Instabilitätswerte von bis zu 0,1°/h , was mit einigen Gyroskopen der unteren und mittleren Preisklasse konkurrenzfähig ist, insbesondere in kommerziellen und industriellen Anwendungen. Gyroskope der unteren und mittleren Preisklasse weisen im Allgemeinen Bias-Instabilitätswerte zwischen 0,001°/h und 0,1°/h und eignen sich daher für Anwendungen, bei denen eine hohe Kurzzeitstabilität entscheidend ist.
| Metrisch | Hochpräzise MEMS-Gyroskope | Niedrig- bis mittelpreisige Nebelmaschinen |
|---|---|---|
| Bias-Instabilität | 0,1°/h bis 1°/h | 0,001°/h bis 0,1°/h |
| Anwendungseignung | Geeignet für die meisten Aufgaben mit mittlerer Präzision | Bevorzugt für Navigation in risikoreichen Situationen |
2. Drift
Die Drift ist die kumulative Abweichung der Gyroskop-Ausgangssignale im Laufe der Zeit, die häufig durch Temperaturänderungen, Vibrationen und Sensorauschen verursacht wird. Bei Anwendungen, die Langzeitstabilität erfordern, wie beispielsweise Satelliten- oder Tiefseenavigation, ist die Drift ein wichtiger Faktor.
FOGs sind für ihre sehr geringen Driftwerte bekannt und eignen sich daher hervorragend für den Langzeitbetrieb in sicherheitskritischen Umgebungen. MEMS-Gyroskope weisen trotz Verbesserungen typischerweise immer noch eine höhere Drift über längere Zeiträume auf, was ihren Einsatz in Anwendungen einschränken kann, die höchste Präzision über Stunden oder Tage ohne Neukalibrierung erfordern.
In der Praxis bedeutet dies, dass für Systeme, bei denen die Positionsgenauigkeit über lange Zeiträume aufrechterhalten werden muss, FOGs bevorzugt werden. MEMS-Gyroskope hingegen eignen sich gut für Anwendungen, bei denen eine gelegentliche Neukalibrierung möglich ist, wie beispielsweise bei UAVs und Industrieanlagen.
| Metrisch | Hochpräzise MEMS-Gyroskope | Niedrig- bis mittelpreisige Nebelmaschinen |
|---|---|---|
| Drift | Mäßig, bei längerer Dauer höher | Sehr niedrig, über längere Zeiträume stabil |
| Anwendungseignung | Kurzfristige Präzision mit möglicher Neukalibrierung | Langfristige Missionen mit hoher Stabilität |
3. Größe, Leistung und Kosteneffizienz
MEMS-Gyroskope sind im Allgemeinen kleiner, leichter und verbrauchen weniger Strom als FOGs. Dadurch eignen sie sich ideal für Anwendungen mit begrenztem Platz und Energiebedarf. Darüber hinaus profitiert die MEMS-Fertigung von etablierten Halbleiterprozessen, was eine höhere Skalierbarkeit und niedrigere Produktionskosten ermöglicht. Dies ist ein wesentlicher Faktor für die zunehmende Verbreitung von MEMS in preissensiblen Märkten wie Unterhaltungselektronik, Automobilindustrie und tragbaren Industriegeräten. FOGs mit ihren komplexen optischen Baugruppen sind weiterhin teurer und werden häufig nur in Anwendungen eingesetzt, in denen ihre überlegene Präzision die Investition rechtfertigt.
| Besonderheit | Hochpräzise MEMS-Gyroskope | Niedrig- bis mittelpreisige Nebelmaschinen |
|---|---|---|
| Größe und Gewicht | Kompakt, geeignet für kleine Geräte | Größer aufgrund optischer Komponenten |
| Stromverbrauch | Niedriger, effizienter | Höher, insbesondere bei kontinuierlicher Nutzung |
| Kosten | Niedriger, massenproduziert | Höher aufgrund komplexer Montage |
4. Umweltresilienz und Anwendung im Freien
Moderne, hochpräzise MEMS-Gyroskope eignen sich hervorragend für den Außeneinsatz und arbeiten zuverlässig unter verschiedensten Bedingungen, einschließlich moderater Temperaturschwankungen und Vibrationen. Obwohl FOGs nach wie vor eine überlegene Temperaturbeständigkeit und Stabilität bei extremen Stößen bieten, sind hochpräzise MEMS-Gyroskope mittlerweile robust genug, um anspruchsvolle Außenanwendungen wie unbemannte Luftfahrzeuge (UAVs) , autonome Fahrsysteme und Industriemaschinen .
| Umweltfaktor | Hochpräzise MEMS-Gyroskope | Niedrig- bis mittelpreisige Nebelmaschinen |
|---|---|---|
| Temperaturtoleranz | Gut geeignet für moderate Extreme | Hervorragend geeignet für extreme Bedingungen |
| Stoß und Vibration | Hohe Widerstandsfähigkeit, langlebig bei mäßigen Stößen | Hervorragend geeignet für raue Umgebungen |
| Anwendungen im Freien | Weit verbreitet (z. B. Drohnen, Fahrzeuge) | Ideal für Systeme im Außenbereich mit hoher Wirkung und hohem Einsatz |
Erläuterung der FOG-Leistungsmerkmale
Faseroptische Gyroskope (FOGs) zeichnen sich durch ihre präzise und stabile Leistung aus und sind daher eine bewährte Wahl für kritische Navigationssysteme. Bei der Bewertung von FOGs ist das Verständnis bestimmter Leistungsspezifikationen unerlässlich – jede Spezifikation spielt eine entscheidende Rolle bei der Beurteilung, ob ein bestimmtes FOG-Modell den Anforderungen einer anspruchsvollen Anwendung gerecht wird. Ich werde Ihnen die wichtigsten FOG-Spezifikationen erläutern und erklären, wie sich diese auf Funktionalität und Leistung unter realen Bedingungen auswirken.
1. Dynamikbereich
Der Dynamikbereich gibt die maximale Winkelgeschwindigkeit an, die ein Gyroskop präzise messen kann, typischerweise in Grad pro Sekunde (°/s). FOGs weisen häufig Dynamikbereiche zwischen ±300°/s und ±500°/s , wodurch sie hohe Rotationsgeschwindigkeiten präzise erfassen können. Für Anwendungen wie Luft- und Raumfahrt sowie Verteidigung ist dieser Bereich essenziell, da plötzliche, schnelle Lageänderungen Gyroskope erfordern, die präzise mithalten können.
| Spezifikation | Typischer Wert | Anwendungsbeispiel |
|---|---|---|
| Dynamikbereich | ±300°/s bis ±500°/s | Systeme in der Luft- und Raumfahrt, wo Hochgeschwindigkeitsrotationen üblich sind |
2. Bias-Instabilität
Die Bias-Instabilität ist ein entscheidendes Maß für die Kurzzeitstabilität eines Gyroskops und wird üblicherweise in Grad pro Stunde (°/h) angegeben. Eine geringe Bias-Instabilität bedeutet minimale Drift über die Zeit, was für Langzeitmissionen unerlässlich ist, bei denen die Positionsdaten ohne externe Neukalibrierung präzise bleiben müssen. Hochwertige FOGs erreichen eine Bias-Instabilität von nur 0,001°/h und eignen sich daher ideal für Anwendungen, die über lange Zeiträume extrem stabile Messwerte erfordern, wie beispielsweise Satelliten und hochpräzise Trägheitsnavigation.
| Spezifikation | Hochwertiger FOG-Wert | Mittlerer FOG-Wert | Anwendungsbeispiel |
|---|---|---|---|
| Bias-Instabilität | 0,001°/h bis 0,05°/h | 0,1°/h bis 0,5°/h | Anwendungen im Bereich Raumfahrt und Verteidigung, die eine kontinuierliche Genauigkeit erfordern |
3. Angle Random Walk (ARW)
Der Winkel-Random-Walk (ARW) ist ein Indikator für das Rauschen im Gyroskopsignal und wird häufig in Grad pro Quadratwurzel der Stunde (°/√h) . Niedrigere ARW-Werte deuten auf ein saubereres, stabileres Signal mit geringeren zufälligen Schwankungen hin. Hochpräzise FOGs (Feinmotorische Gyroskope) weisen typischerweise ARW-Werte unter 0,01°/√h . Dies ist entscheidend für Anwendungen wie Robotik und Präzisionsführungssysteme, bei denen selbst geringfügiges Rauschen im Laufe der Zeit zu kumulativen Fehlern führen kann.
| Spezifikation | Typischer FOG-Wert | Bedeutung für die Anwendung |
|---|---|---|
| Angle Random Walk | 0,01°/√h oder niedriger | Verringert kumulative Fehler in hochpräzisen Systemen wie Robotern |
4. Linearität und Wiederholbarkeit des Skalierungsfaktors
Die Linearität des Skalenfaktors gibt an, wie genau die Messwerte des Gyroskops den tatsächlichen Winkelgeschwindigkeitsänderungen entsprechen und wird typischerweise in Teilen pro Million (ppm) angegeben. Hochpräzise FOGs erreichen Werte unter 20 ppm und gewährleisten so konsistente und zuverlässige Messwerte über einen weiten Rotationsbereich. Die Wiederholbarkeit des Skalenfaktors misst die Fähigkeit des Gyroskops, bei wiederholten Tests konsistente Messwerte zu liefern und liegt bei High-End-Modellen üblicherweise innerhalb von ±10 ppm . Diese Kennzahlen sind essenziell für Systeme, in denen konsistente Messwerte für Rückkopplungs- und Regelkreise entscheidend sind, wie beispielsweise in Stabilisierungsplattformen.
| Metrisch | Hochwertiger FOG-Wert | Auswirkungen auf die Leistung |
|---|---|---|
| Linearität des Skalierungsfaktors | < 20 ppm | Gewährleistet zuverlässige Daten über verschiedene Rotationsgeschwindigkeiten hinweg |
| Skalierungsfaktor Wiederholbarkeit | ±10 ppm | Schlüssel für eine gleichbleibende Leistung in Steuerungssystemen |
5. Temperaturkompensationsbereich
FOGs werden häufig in Umgebungen mit extremen oder schwankenden Temperaturen eingesetzt. Hochwertige FOGs bieten typischerweise einen Temperaturkompensationsbereich von -40 °C bis +85 °C und gewährleisten so die Genauigkeit sowohl in der Luft- und Raumfahrt als auch unter Wasser. Die gleichbleibende Leistung über diesen Bereich verhindert Signalabweichungen oder -schwankungen aufgrund von Wärmeausdehnung oder -kontraktion interner Komponenten.
| Spezifikation | Typischer Bereich | Wichtige Anwendungsbeispiele |
|---|---|---|
| Temperaturkompensationsbereich | -40 °C bis +85 °C | Luft- und Raumfahrt, Schifffahrt und andere extreme Umgebungen |
Wichtige Faktoren, die bei der Auswahl eines FOG zu berücksichtigen sind
Die Auswahl des richtigen Faseroptikgyroskops (FOG) für eine Anwendung kann komplex sein. In meinen 15 Jahren Erfahrung mit FOG-Systemen habe ich festgestellt, dass der Schlüssel darin liegt, die spezifischen FOG-Spezifikationen mit den Betriebsanforderungen Ihres Systems in Einklang zu bringen. Von der Stabilität der Vorspannung bis hin zur Robustheit gegenüber Umwelteinflüssen spielt jeder Aspekt eine entscheidende Rolle bei der Beurteilung, ob ein FOG-Modell den Anforderungen genügt. Im Folgenden erläutere ich Ihnen die wichtigsten Faktoren und zeige Ihnen einen strukturierten Ansatz, wie Sie die beste Wahl für Ihre individuelle Anwendung treffen können.
1. Definieren Sie Ihre Bewerbungsanforderungen
Zunächst ist es wichtig, die Anforderungen Ihrer Anwendung genau zu verstehen. Benötigt sie hohe Stabilität über lange Zeiträume oder wird sie unter extremen Umgebungsbedingungen betrieben? Beginnen Sie mit einer Auflistung der spezifischen Anforderungen hinsichtlich Genauigkeit, Betriebsdauer, Umgebungsfaktoren und verfügbarem Platz. Lassen Sie uns diese Aspekte in der folgenden Tabelle aufschlüsseln:
| Anforderungsaspekt | Schlüsselfragen | Anwendungsbeispiele |
|---|---|---|
| Genauigkeit | Welches Maß an Bias-Instabilität und -Drift ist akzeptabel? | Luft- und Raumfahrt, autonome Navigation |
| Umweltresilienz | Wird das FOG starken Vibrationen, Stößen oder extremen Temperaturen ausgesetzt sein? | Militär- und Industrierobotik |
| Größen- und Leistungsbeschränkungen | Ist die Systemgröße oder die Leistungsaufnahme der limitierende Faktor? | Tragbare Geräte, UAVs |
2. Priorisierung der Anforderungen an Bias-Instabilität und Drift
In hochpräzisen Anwendungen Bias-Instabilität und Drift entscheidend. Benötigt Ihr System langfristige Genauigkeit, wählen Sie einen FOG mit geringer Bias-Instabilität (z. B. 0,001°/h für anspruchsvolle Anwendungen), um die Drift im Laufe der Zeit zu minimieren. Anwendungen in der Luft- und Raumfahrt sowie der Tiefseenavigation profitieren beispielsweise stark von FOGs mit minimaler Drift.
| Erfordernis | Empfohlene FOG-Spezifikation | Beispielanwendung |
|---|---|---|
| Bias-Instabilität | 0,001°/h bis 0,05°/h | Satelliten- und U-Boot-Navigation |
| Drift | Sehr niedrig, über lange Zeiträume stabil | Hochriskante, lang andauernde Missionen |
3. Berücksichtigen Sie den Dynamikbereich und den Winkel-Random-Walk
Der Dynamikbereich eines FOG (Focused Observatory) gibt die maximale Winkelgeschwindigkeit an, die er präzise messen kann, während der Angle Random Walk (ARW) das Rauschen im Sensorausgang widerspiegelt. Für Anwendungen wie UAVs (Unmanned Aerial Vehicles) oder Robotik, bei denen plötzliche Drehungen und präzise Korrekturen erforderlich sind, verbessern ±500°/s ) und ein niedriger ARW (z. B. < 0,01°/√h
| Spezifikation | Typischer Wert | Hauptvorteil |
|---|---|---|
| Dynamikbereich | ±300°/s bis ±500°/s | Geeignet für schnelle Rotationsszenarien |
| Angle Random Walk (ARW) | < 0,01°/√h | Reduziert kumulatives Rauschen für mehr Präzision |
4. Temperaturkompensationsbereich auswerten
Bei Anwendungen, die extremen Temperaturen ausgesetzt sind – wie beispielsweise Höhendrohnen, militärische Ausrüstung oder Tiefsee-Explorationsfahrzeuge – muss der Temperaturkompensationsbereich des FOGs Ihre Betriebsumgebung abdecken. Hochwertige FOGs bieten typischerweise Bereiche von -40 °C bis +85 °C und gewährleisten so eine gleichbleibende Leistung in verschiedenen Klimazonen.
| Temperaturbereich | Anwendungseignung |
|---|---|
| -40 °C bis +85 °C | Luft- und Raumfahrt, Militär, Schifffahrt |
| -20 °C bis +60 °C | Industrieroboter, Standard-Außenanwendungen |
5. Größe, Leistung und Kosten in Einklang bringen
Bei tragbaren oder batteriebetriebenen Systemen sind Größe und Stromverbrauch von FOGs oft entscheidende Faktoren. Hochpräzise FOGs sind aufgrund der Anforderungen an die Glasfasern tendenziell größer, einige Modelle bieten jedoch ein gutes Verhältnis von kompakter Größe und Energieeffizienz. Zudem ist zu beachten, dass High-End-FOGs zwar teurer sind, aber häufig eine höhere Zuverlässigkeit und Präzision bieten und sich daher für kritische Anwendungen wirtschaftlich lohnen.
| Faktor | Hochpräziser Nebel | Kompaktes, effizientes FOG |
|---|---|---|
| Größe und Gewicht | Größer, geeignet für Systeme mit hohem Einsatz und hoher Präzision | Kompakt, ideal für tragbare Geräte |
| Energieeffizienz | Mittel bis hoch, benötigt externe Stromversorgung | Hochwertig, geeignet für batteriebetriebene Geräte |
| Kosten | Höherwertig, ideal für unternehmenskritische Systeme | Moderat, bietet ein ausgewogenes Verhältnis zwischen Kosten und Leistung |
Einführung der FOG-Technologie von GuideNav
Die faseroptischen Gyroskope von GuideNav genießen das Vertrauen von Kunden in über 25 Ländern aufgrund ihrer Zuverlässigkeit, Genauigkeit und Belastbarkeit in anspruchsvollen Umgebungen. Jedes Gyroskop wird sorgfältig entwickelt und strengstens geprüft, um höchste Standards zu erfüllen und eine gleichbleibende Leistung dort zu gewährleisten, wo es am wichtigsten ist. Ob präzise Orientierung in einem Raumfahrzeug, robuste Navigation in einem autonomen Fahrzeug oder Stabilität in einem Hochseeschiff – die faseroptischen Gyroskope von GuideNav liefern die Leistung, auf die Sie sich verlassen können.
GuideNav ist mehr als nur ein Anbieter; wir sind ein Partner für präzise Navigation und bieten maßgeschneiderte Lösungen, die den individuellen Anforderungen jeder Anwendung gerecht werden.
Vergleich der GuideNav FOG-Modelle
| Modell | Typ | Bias-Instabilität | Dynamikbereich | Angle Random Walk (ARW) | Temperaturbereich | Beste Anwendungen |
|---|---|---|---|---|---|---|
| GFS40B | Einachsig | 0,001°/h | ±300°/s | 0,005°/√h | -40 °C bis +85 °C | Luft- und Raumfahrt, Verteidigung, Satellitensysteme |
| GFS70A | Einachsig | 0,01°/h | ±500°/s | 0,01°/√h | -40 °C bis +85 °C | UAVs, Robotik, industrielle Automatisierung |
| GFS120B | Einachsig | 0,05°/h | ±400°/s | 0,02°/√h | -40 °C bis +85 °C | Schifffahrt, Offshore-Plattformen, robuste Industrieausrüstung |
| GTF40 | Drei-Achsen | 0,01°/h (pro Achse) | ±300°/s pro Achse | 0,01°/√h (pro Achse) | -20 °C bis +70 °C | Autonome Fahrzeuge, Drohnen, Robotik |
| GTF70A | Drei-Achsen | 0,005°/h (pro Achse) | ±400°/s pro Achse | 0,005°/√h (pro Achse) | -40 °C bis +85 °C | Präzisionsnavigation, Hochgeschwindigkeitsrobotik |
| GTF120 | Drei-Achsen | 0,001°/h (pro Achse) | ±500°/s pro Achse | 0,002°/√h (pro Achse) | -40 °C bis +85 °C | Luft- und Raumfahrt, Verteidigung, komplexe Robotersysteme |
