Thermische Empfindlichkeit in faseroptischen Gyroskopen: Designstrategien für extreme Umgebungen
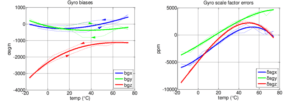
Die thermische Empfindlichkeit von faseroptischen Gyroskopen entsteht durch Materialausdehnung, Brechungsindexänderungen und das Verhalten der optischen Quelle. Fortschrittliche Strategien – thermische Kompensation, Optimierung der Spulenwicklung und robuste Kalibrierung – ermöglichen es faseroptischen Gyroskopen, ihre Genauigkeit auch unter extremen Bedingungen aufrechtzuerhalten.
ARW-basiertes Design: Praktische Ingenieursleistungen zur IMU-Auswahl (Teil 2)
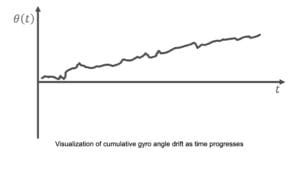
Angle Random Walk (ARW) setzt der Genauigkeit von IMUs die ultimative Grenze. Es lässt sich nicht softwareseitig beseitigen, sondern nur durch die Auswahl rauscharmer Sensoren, ein stabiles thermisches Design, Schwingungsisolierung und effektive Multisensorfusionsstrategien reduzieren.
ARW verstehen: Die versteckte Grenze der IMU-Genauigkeit (Teil 1)
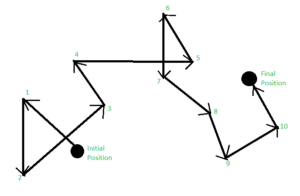
ARW ist keine Spezifikation, sondern ein Taktgeber. Vom Startzeitpunkt Ihrer IMU an zeigt er an, wie schnell die Orientierungstreue abnimmt. Je niedriger der Wert ist, desto länger bleibt Ihr System korrekt.
10 Konstruktionsfehler, die Ingenieure bei der Integration von IMUs begehen
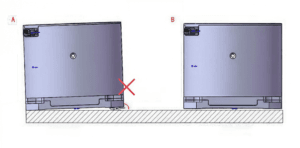
Integrationsfehler bei IMUs können die Zuverlässigkeit der Navigation erheblich beeinträchtigen. Von Fehlausrichtung und Vibrationen bis hin zu mangelhafter Kalibrierung und übermäßiger Nutzung von Sensordatenfusion – Ingenieure wiederholen oft dieselben Fehler. In diesem Leitfaden untersuchen wir die zehn häufigsten Fehler bei der IMU-Integration, erläutern ihre Folgen und bieten Expertenlösungen, die Sie in Ihren eigenen Projekten anwenden können.
FOG-Technologie in der Raumfahrzeug-Lageregelung: Jenseits der Grenzen von MEMS
Faseroptische Gyroskope übertreffen MEMS durch ihre Langzeitstabilität, Strahlungsbeständigkeit und über Jahre hinweg zuverlässige Präzision. Sie sind unverzichtbar für Satelliten, Satellitenkonstellationen und Weltraumsonden, bei denen höchste Genauigkeit unerlässlich ist.
Wie die Fusion mehrerer Sensoren die Trägheitsnavigationssysteme neu definiert
Die Genauigkeit der Trägheitsnavigation ist letztendlich durch die Qualität der Modellierung und Kompensation von Sensorfehlern begrenzt. Von systematischer Abweichung bis hin zu zufälligen Bewegungen erfordert eine effektive Fehlerkorrektur eine Kombination aus Hardware-Design, Kalibrierungsroutinen und algorithmischer Echtzeitkorrektur.