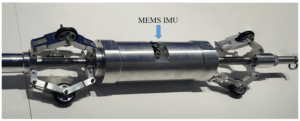
Anwendung von MEMS-IMU in Pipeline-Inspektionsrobotern
MEMS-IMUs ermöglichen eine präzise Trägheitsnavigation für Pipeline-Inspektionsroboter, die in GNSS-freien Umgebungen operieren. Durch die Bereitstellung stabiler Lage-, Geschwindigkeits- und Positionsdaten gewährleisten sie eine zuverlässige Fehlerkartierung, eine reibungslose Bahnsteuerung und einen kontinuierlichen Betrieb in beengten unterirdischen oder Unterwasserpipelines.

Die versteckten Fallstricke beim Einsatz hochpräziser MEMS-IMUs: Was jeder Integrator wissen sollte
Hochpräzise MEMS-IMUs bieten eine unübertroffene Bewegungserkennungsleistung – jedoch nur bei korrekter Anwendung. Dieser Artikel zeigt vier kritische Anwendungsfehler auf, die häufig zu Genauigkeitseinbußen führen, und wie diese in der Praxis vermieden werden können.
Vor- und Nachteile der Honeywell MEMS IMU HG1930
Der Honeywell HG1930 ist ein kompakter, taktischer MEMS-IMU, der zuverlässige Leistung und ein robustes Design für UAVs, Roboter und Verteidigungssysteme bietet. Er liefert stabile Genauigkeit auch unter rauen Bedingungen, ist jedoch mit höheren Kosten und Exportbeschränkungen verbunden.

Einblick in die INS-basierte Lokalisierungstechnologie hinter dem autonomen Fahren
Autonome Fahrzeuge erreichen eine Genauigkeit im Zentimeterbereich durch GNSS/INS-Integration, LiDAR-Kartierung und visuelle Wahrnehmung, wobei hochpräzise IMUs den Kern der Lokalisierung bilden, wenn GPS-Signale ausfallen.

Kann eine IMU allein eine Odometrie durchführen?
Theoretisch kann eine IMU die Odometrie durch doppelte Integration berechnen, jedoch führen systematische Fehler und Rauschen zu einer exponentiellen Drift im Laufe der Zeit. Navigationssysteme in der Praxis nutzen daher die Fusion von IMU-Daten mit GNSS, LiDAR oder Kameras, um Präzision und Stabilität zu gewährleisten.
Wann sollte man eine FOG-IMU neu kalibrieren oder austauschen?
Kalibrieren Sie Ihre FOG-IMU alle 12–24 Monate neu, um die Stabilität der Abweichung zu gewährleisten. Tauschen Sie sie nach 5–8 Jahren oder bei Überschreitung der Spezifikationen aus, um die langfristige Navigationszuverlässigkeit sicherzustellen.