Inertialmesseinheiten (IMUs) sind die stillen Arbeitspferde der modernen Navigation. Sie erfassen jede Bewegung, Drehung und Beschleunigung und liefern wichtige Daten für UAVs, Schiffe, Landfahrzeuge und Luft- und Raumfahrtsysteme. Trotz ihrer entscheidenden Rolle werden IMUs jedoch oft missverstanden oder falsch eingesetzt. Kleine Fehler in der Integrationsphase können sich zu massiven Betriebsstörungen ausweiten – mit Folgen wie Drift, Instabilität oder sogar Missionsverlust. Die Integration von IMUs ist also kein einfaches „Plug-and-Play“. Sie erfordert Präzision, Disziplin und Weitsicht.
Integrationsfehler bei IMUs können die Zuverlässigkeit der Navigation erheblich beeinträchtigen. Von Fehlausrichtung und Vibrationen bis hin zu mangelhafter Kalibrierung und übermäßiger Nutzung von Sensordatenfusion – Ingenieure wiederholen oft dieselben Fehler. In diesem Leitfaden untersuchen wir die zehn häufigsten Fehler bei der IMU-Integration, erläutern ihre Folgen und bieten Expertenlösungen, die Sie in Ihren eigenen Projekten anwenden können.
Inhaltsverzeichnis
Fehlausrichtung während der Installation
Fehler:
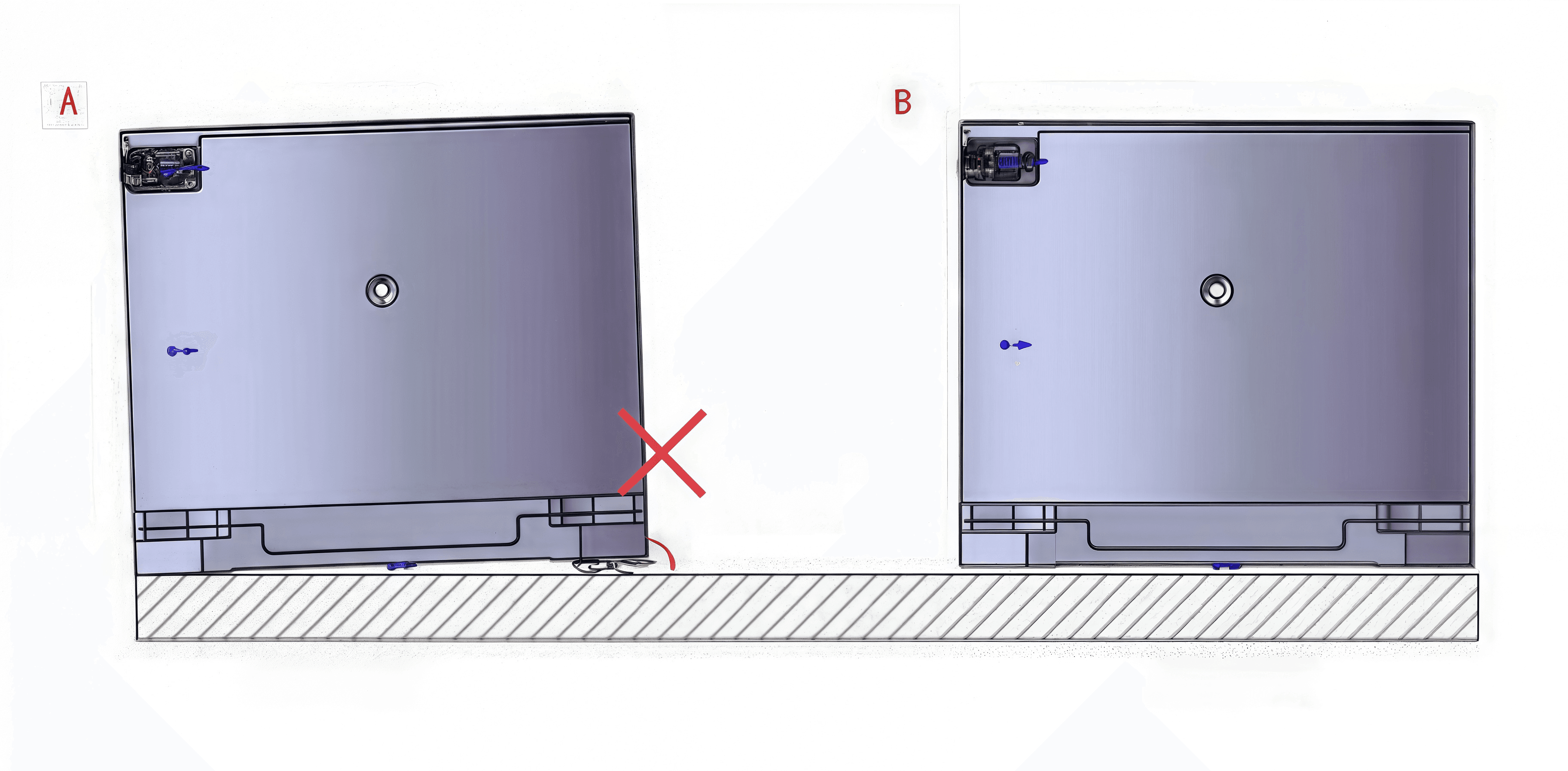
Ingenieure montieren IMUs manchmal „nahe genug“ am Bezugssystem der Plattform, ohne sie präzise auszurichten. Ein paar Grad Fehler mögen geringfügig erscheinen, aber in der Navigation summieren sich diese Abweichungen zu massiven Fehlern.
Auswirkungen:
Falsch ausgerichtete Achsen verursachen systematische Abweichungen bei den Lage- und Geschwindigkeitsmessungen. Bei längeren Missionen führt dies zu zunehmender Abweichung, insbesondere bei GPS-losen Operationen, wo die IMU die einzige verlässliche Datenquelle darstellt. Eine Drohne kann dadurch langsam vom Kurs abkommen oder ein Roboterfahrzeug seine Richtung falsch einschätzen.
Fix:
CAD stets Referenzachsen und verwenden Sie bei der Montage Präzisionswerkzeuge wie Laser-Ausrichtvorrichtungen. Führen Sie nach der Montage eine Ausrichtungskalibrierung durch, um kleine Abweichungen zu messen und auszugleichen.
💡Profi-Tipp: Verlassen Sie sich niemals allein auf mechanische Toleranzen – die Kalibrierung nach der Integration ist Ihr Sicherheitsnetz.
Vernachlässigung der Schwingungsisolierung
Fehler:
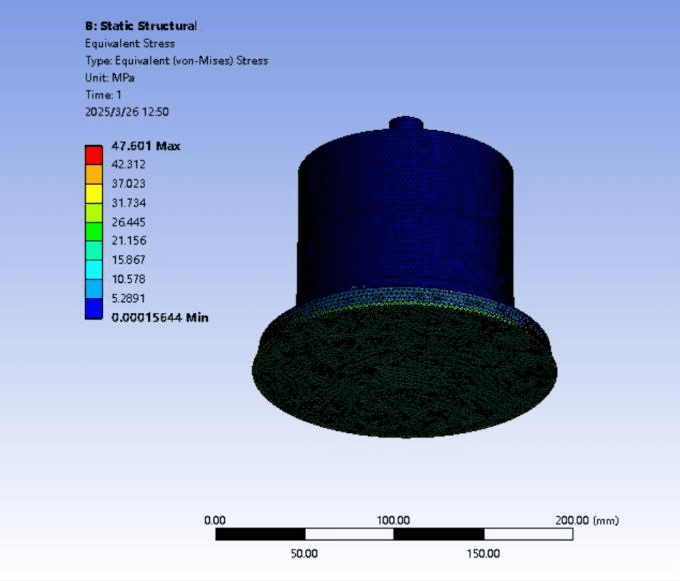
Die Montage einer IMU direkt an vibrierenden Strukturen wie Propellerarmen, Motoren oder Fahrzeugchassis, unter der Annahme, dass die internen Filter des Sensors dies kompensieren.
Auswirkungen:
Vibrationen verfälschen die Signale von Beschleunigungsmessern und erzeugen falsche Winkelgeschwindigkeiten in Gyroskopen. Die Folge sind verrauschte Ausgänge, instabile Navigationsfilter und sichtbares Zittern in Stabilisierungssystemen. In Flugzeugen oder Kardanaufhängungen können Vibrationen die Zielgenauigkeit erheblich beeinträchtigen.
Fix:
Verwenden Sie Schwingungsdämpfer, die auf die dominanten Frequenzen Ihrer Plattform abgestimmt sind. Kombinieren Sie Hardware-Dämpfung mit digitaler Filterung, um Resteffekte zu minimieren. Validieren Sie die Leistung unter realen Einsatzbedingungen, nicht nur unter Laborbedingungen.
💡Profi-Tipp: Führen Sie immer eine Schwingungsspektrumanalyse Ihrer Plattform durch, bevor Sie die Isolationskonstruktion endgültig festlegen.
Vernachlässigung des Wärmemanagements
Fehler:
Unter der Annahme, dass die im IMU integrierte Temperaturkompensation alle thermischen Probleme löst.
Auswirkungen:
Reale Missionen beinhalten schnelle Erwärmung durch Elektronik, Triebwerksabgase oder Kälteperioden. Dies führt zu Instabilitäten der Messgenauigkeit, Skalierungsfaktordrift und verminderter Genauigkeit. Im Weltraum kann die thermische Belastung katastrophale Folgen haben, wenn sie nicht berücksichtigt wird.
Fix:
Die thermische Regelung sollte auf Systemebene erfolgen. Zu den Optionen gehören isolierende Gehäuse, der Einsatz von Wärmeverteilern oder auch gesteuerte Heizungen. Die Temperaturstabilität wird durch die Überwachung der bordeigenen Sensoren während des gesamten Missionsverlaufs sichergestellt.
💡Profi-Tipp: Testen Sie IMUs unter realistischen Temperaturzyklen, nicht nur bei statischen Temperaturpunkten.
Die falsche Leistungsnote wählen
Fehler:
Die Auswahl einer IMU ausschließlich auf Basis von Kosten, Größe oder Verfügbarkeit, ohne Berücksichtigung der Missionsdauer oder der Anforderungen an die Präzision.
Auswirkungen:
MEMS für Endverbraucher mögen in Kurzzeittests akzeptabel erscheinen, driften aber in stundenlangen oder GPS-losen Szenarien unkontrolliert ab. Taktische MEMS oder FOG-IMUs sind für anspruchsvolle Missionen erforderlich, werden aber aus Kostengründen oft vernachlässigt – was später zu kostspieligen Neuentwicklungen führt.
Fix:
Die IMU-Leistung (Bias-Instabilität, Random Walk, Bandbreite) sollte den Missionsanforderungen angepasst werden. Für Hobbydrohnen werden Consumer-MEMS, für UAVs und Verteidigungsfahrzeuge taktische MEMS und für maritime oder Luft- und Raumfahrtoperationen FOGs verwendet.
| IMU-Typ | Häufiger Missbrauch | Korrekte Anwendung |
|---|---|---|
| Consumer MEMS | Aus Kostengründen ausgewählt | Kurzfristige, nicht kritische Robotik |
| Taktisches MEMS | Aufgrund des Preises übersehen | UAVs, UGVs, Verteidigungsplattformen |
| Nebel-IMU | Wird als übertrieben angesehen | Schifffahrt, Luft- und Raumfahrt, GPS-freie Operationen |
💡Profi-Tipp: Wägen Sie stets die Lebenszykluskosten eines Missionsausfalls gegen die Anschaffungskosten des Sensors ab.
Schlechte Kalibrierungsstrategie
Fehler:
Sich ausschließlich auf die Kalibrierung des Herstellers zu verlassen und davon auszugehen, dass diese allgemein gültig ist.
Auswirkungen:
Mechanische Toleranzen, Montagefehler und Spannungen in den Steckverbindern erzeugen systemspezifische Abweichungen. Ohne sekundäre Kalibrierung beeinträchtigen diese Fehler die Navigationsleistung und die Fusionsergebnisse.
Fix:
Führen Sie eine Systemkalibrierung durch, z. B. Sechs-Positionen-Tests oder eine Kennlinienanalyse. Aktualisieren Sie die Kalibriertabellen in der Firmware und wiederholen Sie den Vorgang regelmäßig, um konsistente Ergebnisse zu gewährleisten.
💡Profi-Tipp: Betrachten Sie die Kalibrierung als einen regelmäßigen Wartungsschritt, nicht als einen einmaligen Werksvorgang.
Unzureichende Schnittstelle und Datenverarbeitung
Fehler:
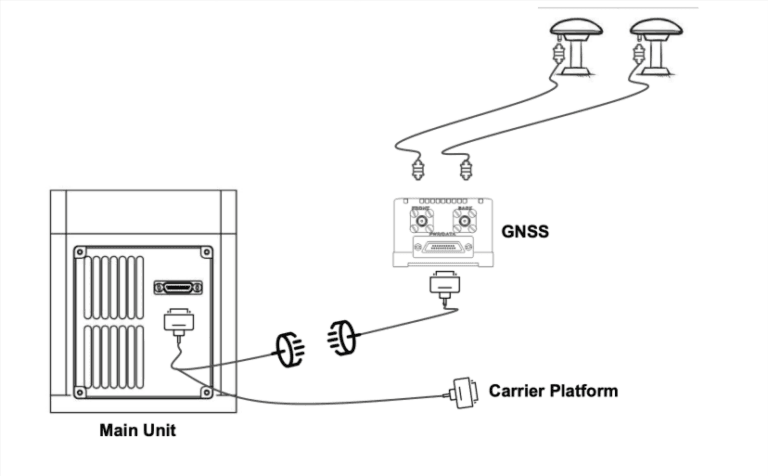
Falsch konfigurierte Abtastraten, Ignorieren der Latenz oder fehlende Synchronisierung der Daten mit anderen Sensoren.
Auswirkungen:
Selbst hochwertige IMUs werden unzuverlässig, wenn ihre Daten verzögert oder falsch ausgerichtet sind. Die Fusion mit GNSS, LiDAR oder Bildverarbeitung schlägt fehl, wenn die Zeitstempel nicht übereinstimmen.
Fix:
Entwerfen Sie robuste Datenpipelines. Verwenden Sie PPS- oder Hardware-Zeitstempel, um die Synchronisierung sicherzustellen. Validieren Sie die durchgängige Latenz vom Sensor bis zum Prozessor.
💡Profi-Tipp: Betrachten Sie die Zeitsynchronisation als Teil der Sensorqualität – nicht als nachträgliche Überlegung.
Magnetische und elektromagnetische Störungen werden vernachlässigt
Fehler:
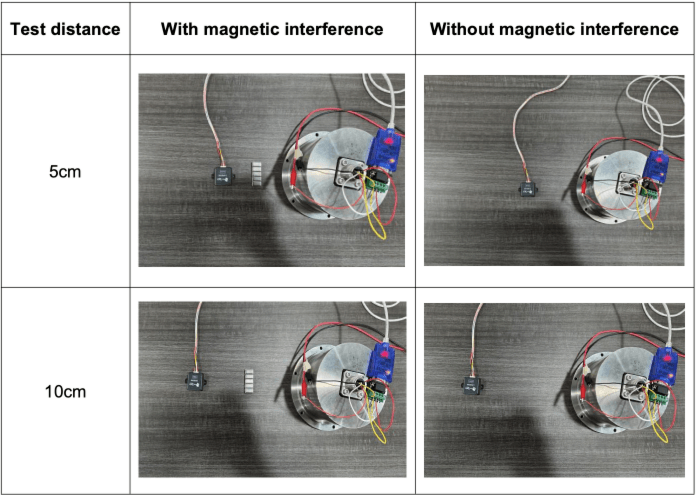
Installation von IMUs in der Nähe von Motoren, Hochstromkabeln oder HF-Antennen.
Auswirkungen:
Magnetfelder verzerren die Signale von Beschleunigungsmessern und Gyroskopen. Elektromagnetische Störungen koppeln sich in die Sensorelektronik ein und verursachen Fehlsignale. Dies tritt besonders häufig bei UAV-Gimbals auf, wo die kompakte Bauweise die Sensoren gefährlich nahe an die Motoren heranführt.
Fix:
Platzieren Sie IMUs fernab von EMI-Quellen. Verwenden Sie abgeschirmte Gehäuse, verdrillte Doppeladerkabel und Erdungsmaßnahmen. Testen Sie unter Volllast, um versteckte Störungen aufzudecken.
💡Profi-Tipp: Eine saubere mechanische Konstruktion kann EMV-Probleme effektiver lösen als komplexe Filter.
Langzeitdrift nicht berücksichtigen
Fehler:
Validierung von IMUs mit Kurzzeittests, wobei die Drift über Stunden oder Tage hinweg ignoriert wird.
Auswirkungen:
Die Bias-Instabilität akkumuliert sich und verursacht Positionsfehler von mehreren Kilometern. Systeme, die ausschließlich auf IMUs angewiesen sind (U-Boote, Raumfahrzeuge, GPS-gestörte UAVs), werden unbrauchbar.
Fix:
Führen Sie Ausdauertests durch, die Missionsdauern simulieren. Wählen Sie taktische oder FOG-IMUs für langfristige Navigationsstabilität.
💡Profi-Tipp: Bewerten Sie die Drift immer über einen Zeitraum von mehr als 100 Stunden, nicht nur über 10 Minuten im Labor.
Übermäßige Abhängigkeit von Sensorfusion
Fehler:
Angenommen, Kalman-Filter oder KI-basierte Fusion können schwache IMUs korrigieren.
Auswirkungen:
Unzureichende Sensordaten verfälschen lediglich den Filter. Anstatt die Genauigkeit zu verbessern, vervielfacht die Datenfusion die Fehler – „Müll rein, Müll raus“
Fix:
Beginnen Sie mit zuverlässigen IMU-Daten. Die Datenfusion soll die Leistung verbessern, nicht fehlerhafte Sensoren kompensieren. Nutzen Sie nach Möglichkeit Redundanz, um Signale zu verifizieren.
💡Profi-Tipp: Ein guter IMU reduziert die Filterkomplexität und erhöht die Robustheit drastisch.
Unterschätzung der Umweltqualifizierung
Fehler:
Die IMUs werden nur unter Laborbedingungen getestet, und es wird angenommen, dass die Ergebnisse im Feld dieselben sind.
Auswirkungen:
Feuchtigkeit, Staub, Stöße und extreme Wetterbedingungen überschreiten die Spezifikationen für kommerzielle Anwendungen. Ohne entsprechende Qualifizierung versagen IMUs in kritischen Missionen.
Fix:
Wählen Sie IMUs, die gemäß MIL-STD-810G, DO-160 oder einem gleichwertigen Standard getestet wurden. Fordern Sie Testdaten an, nicht nur Angaben im Datenblatt.
💡Profi-Tipp: Fragen Sie Anbieter nach Qualifikationsberichten – echte Daten sind aussagekräftiger als Marketingversprechen.
Abschluss
Die Integration von IMUs ist sowohl Kunst als auch Wissenschaft. Selbst die fortschrittlichsten Algorithmen und Steuerungssysteme können eine fehlerhafte Installation, mangelhafte Kalibrierung oder unzureichende Tests nicht kompensieren. Indem Ingenieure die hier beschriebenen zehn Fehler vermeiden, können sie das wahre Potenzial von IMUs ausschöpfen und Systeme entwickeln, die im praktischen Einsatz nicht nur bestehen, sondern auch erfolgreich sind.
Bei GuideNav bieten wir eine breite Palette an IMUs (Inertial Measurement Units) mit leistungsstarken MEMS-/Glasfaser-/Mini-Glasfaser-Gyroskopen und MEMS-/Quarz-Beschleunigungsmessern an. Alle unsere Produkte erfüllen strenge Umweltstandards. Sie sind für UAVs, maritime Systeme, Verteidigungsfahrzeuge und Luft- und Raumfahrtplattformen konzipiert, wo absolute Zuverlässigkeit unerlässlich ist. Benötigen Sie eine einsatzbereite IMU? Unsere Experten unterstützen Sie gerne bei der Integration.