Meiner Erfahrung nach übersehen Ingenieure bei der Entwicklung von Trägheitssystemen für den Außeneinsatz oft eine trügerisch einfache Zahl: den Winkel-Random-Walk. Er ist zwar nicht so auffällig wie die Bias-Stabilität oder die Bandbreite, definiert aber die reale Obergrenze dafür, wie lange Ihr System zuverlässig bleibt – insbesondere bei GNSS-Ausfällen. ARW ist kein Fehler, den man durch Kalibrierung herauskalibriert. Es ist das Rauschen, das von Sekunde zu Sekunde zunimmt. Sobald Sie verstehen, wie es funktioniert, ändert sich die Bewertung jeder IMU auf Ihrem Prüfstand.
ARW ist keine Spezifikation, sondern eine Uhr. Sobald Ihre IMU startet, zeigt sie Ihnen, wie schnell die Orientierungssicherheit abnimmt. Je niedriger sie ist, desto länger bleibt Ihr System korrekt.
Im Laufe der Jahre habe ich Teams erlebt, die IMUs anhand von Bias-Spezifikationen und Bandbreitendiagrammen auswählten und dann auf eine Drift stießen, die sich jeder Simulation widersetzte. Diese Drift ist oft nicht auf das zurückzuführen, was sie übersehen haben, sondern auf das, was sie nicht ausreichend gewichtet haben: ARW. Sobald man erkennt, dass ARW den Rauschhorizont definiert, beginnt man, Datenblätter anders zu lesen. Man hört auf zu fragen: „Wie hoch ist die Präzision?“, sondern: „Wie lange kann ich mich darauf verlassen, bevor die Unsicherheit überhandnimmt?“
Inhaltsverzeichnis
Was genau ist ein Angle Random Walk (ARW)?
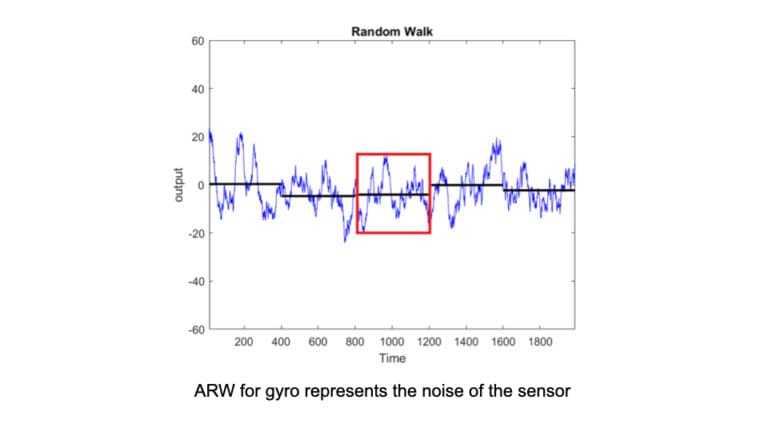
Vereinfacht ausgedrückt der Angle Random Walk (ARW) das Rauschen, das Ihr Gyroskop ansammelt, sobald Sie mit der Integration der Winkelgeschwindigkeit beginnen. Um es klarzustellen: Es handelt sich hierbei nicht um Messfehler oder Bias-Drift. ARW ist die Zunahme der Unsicherheit mit der Quadratwurzel der Zeit , die durch weißes Rauschen im Signalpfad des Gyroskops entsteht. Man kann es nicht durch Kalibrierung beseitigen und nicht warten, bis es sich stabilisiert – es ist immer da und tickt im Hintergrund.
Ich beschreibe ARW gegenüber Nachwuchsingenieuren oft als die „Grundlinienunschärfe“ Ihrer Orientierungsschätzung . Dabei spielt es keine Rolle, ob sich Ihre Plattform bewegt oder stillsteht. Selbst im Labor , mit einem absolut stabilen, am Tisch befestigten Sensor, summiert sich ARW. Das macht es so grundlegend. Es ist kein Leistungsmangel – es ist Physik.
Wie wird ARW in der Praxis gemessen?
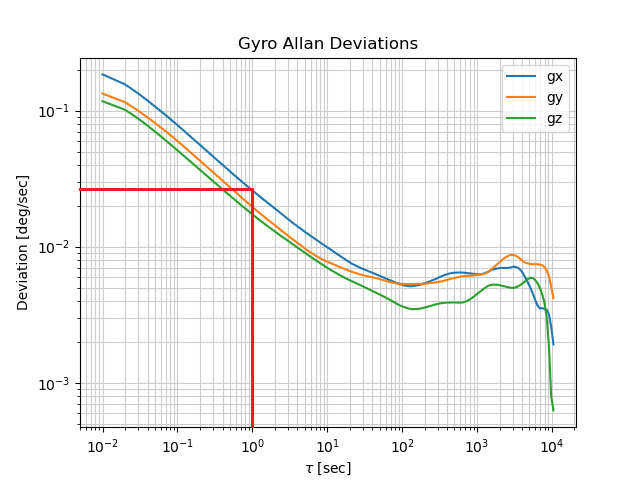
Der Goldstandard zur Messung von ARW ist die Allan-Varianzanalyse.
Diese Technik zerlegt verschiedene Arten von Rauschen über unterschiedliche Zeitintervalle. Bei kurzen Mittelungszeiten zeigt sich ARW als charakteristische -½-Steigung in einem log-log Allan-Abweichungsdiagramm. Es ist das Kennzeichen des weißen Rauschens in der Ausgabe Ihres Kreisels und legt die Grundlage für die Genauigkeit Ihrer Fluglage fest.
Aber Sie können dem Datenblatt nicht einfach vertrauen.
In meinem Arbeitsablauf führe ich stets kontrollierte statische Tests auf einer mechanisch isolierten Plattform durch, protokolliere die Rohdaten des Kreisels und erstelle meine eigenen Allan-Diagramme. Eine saubere Kurzzeitsteigung zeigt mir, dass der Kreisel stabil ist. Ist die Steigung verrauscht oder unregelmäßig, weiß ich, dass die angegebenen „0,05°/√h“ im Einsatz möglicherweise nicht stimmen.
ARW ist nicht nur eine Zahl – es ist ein Muster, das Sie in realen Daten sehen sollten.
Aus diesem Grund betrachte ich ARW als etwas, das validiert werden muss, nicht nur als etwas, das zitiert werden muss. Wenn Ihre Allan-Varianz nicht mit der Spezifikation übereinstimmt, könnte Ihr gesamter Fusion-Stack später darunter leiden.
Warum ist ARW für die IMU-Genauigkeit entscheidend?
Lärm, der niemals schläft
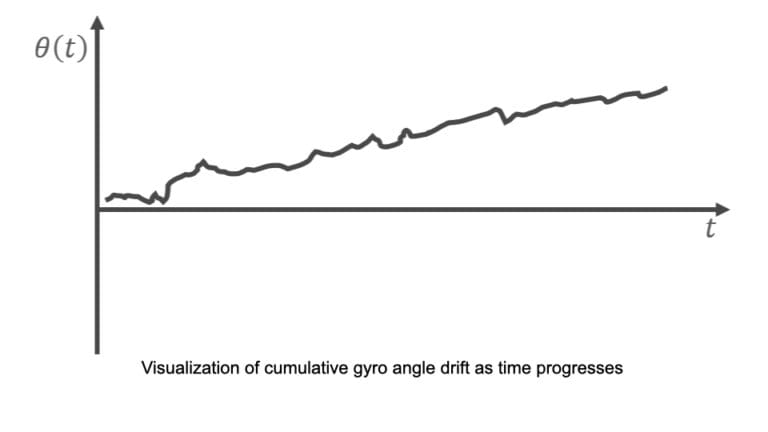
Im Gegensatz zu deterministischen Fehlern wie Bias oder Skalierungsfaktor führt ARW kontinuierlich zu Unsicherheiten bei Ihrer Orientierungsschätzung. Da Gyroskope die Winkelgeschwindigkeit messen und diese Geschwindigkeiten über die Zeit integriert , summieren sich selbst kleine zufällige Schwankungen zu einer erheblichen Winkeldrift. Sie brauchen keine Minuten oder Stunden, um die Auswirkungen zu spüren – auf hochempfindlichen Plattformen beginnt ARW innerhalb von Sekunden, die Genauigkeit zu beeinträchtigen .
Die unsichtbare Decke der Navigation
Der ARW setzt eine harte Grenze dafür, wie lange Ihre IMU eine zuverlässige Orientierung liefern kann, wenn externe Korrekturen (wie GNSS oder Magnetometer) nicht verfügbar sind. Ich habe erlebt, wie perfekt abgestimmte Kalman-Filter allmählich die Kursstabilität verloren, einfach weil der zugrunde liegende Kreisel einen für die Missionsdauer zu hohen ARW hatte . Das ist kein Softwareproblem, sondern eine physikalische Einschränkung. Bei jedem von mir entwickelten Trägheitssystem kann ich, sobald ich den ARW kenne, vorhersagen, wann die Navigation fehlschlägt. Und das ist wirkungsvoll.
Wie unterscheidet sich ARW von Bias-Instabilität?
| Angle Random Walk (ARW) | Bias-Instabilität |
|---|---|
| Kurzzeitiges Rauschen. Erscheint sofort in der Kreiselausgabe als kleine zufällige Schwankungen. | Mittel- bis langfristige Drift. Eine langsame Wanderung des Nullzinsniveaus im Laufe der Zeit. |
| Nimmt mit der Zeit zu. Bewirkt, dass sich der Orientierungsfehler kontinuierlich ansammelt. | Hat ein flaches Plateau in Allan-Varianzdiagrammen – es ist der „Buckel“, nach dem Ingenieure suchen. |
| Unvorhersehbar, aber begrenzt. Kann statistisch modelliert, aber nicht entfernt werden. | Langsam variierend. Oft modelliert und teilweise mit Filtern kompensiert. |
| Dominiert die Genauigkeit im Kurzzeitbereich. Besonders kritisch bei sich schnell bewegenden, hochdynamischen Systemen. | Dominiert die Langzeitpräzision. Wichtig bei Anwendungen wie INS in Vermessungsqualität oder Langzeitnavigation. |
Warum die Verwirrung?
Denn sowohl ARW als auch Bias-Instabilität verursachen Drift – allerdings auf unterschiedliche Weise und in unterschiedlichen Zeiträumen. Ingenieure, die sich noch nicht mit Inertialsystemen auskennen, verwechseln diese oft und denken, Bias-Drift sei die einzige Ursache für Navigationsfehler. Meiner Erfahrung nach ist es oft ARW, das die Leistung bei taktischen Missionen begrenzt , insbesondere wenn die Betriebszeit ohne GNSS in Minuten und nicht in Stunden gemessen wird.
Was sind typische ARW-Werte für verschiedene IMUs?
In echten Projekten frage ich selten: „Was ist die beste IMU ?“ – ich frage: „Was ist der niedrigste ARW, den ich bei dieser Größe, diesem Gewicht und diesem Budget bekommen kann?“ ARW ist oft die Spezifikation, die Ihnen im Stillen sagt, ob ein Sensor für den Verbraucherbereich, für taktische Zwecke oder für strategische Zwecke geeignet ist.
So habe ich die Aufteilung von ARW nach Sensorklassen gesehen:
| IMU-Klasse | Typische ARW (°/√h) | Wo es hingehört |
|---|---|---|
| Verbraucher-MEMS | 1 – 10 | Telefone, Wearables, Robotik für Einsteiger |
| Industrielle MEMS | 0.1 – 1 | Drohnen mit GNSS, leichte autonome Plattformen |
| Taktische MEMS | 0.05 – 0.1 | Verteidigungs-UAVs, Waffenstabilisierung, Fahrzeuge |
| Navigationsfähiges FOG | 0.001 – 0.01 | Seefahrt, Luft- und Raumfahrt, Schienenverkehr, Langstrecken-UAVs |
| Strategisches RLG | < 0.001 | U-Boote, Interkontinentalraketen, hochsichere Militärsysteme |
Ich behandle ARW bei Designentscheidungen wie einen Sperrfilter.
Wenn mein System 30 Minuten ohne GNSS auskommen und eine Kursgenauigkeit von 1° beibehalten muss, reichen MEMS-Einheiten mit 0,2°/√h einfach nicht aus. Taktische MEMS schaffen das vielleicht kaum. Wenn ich mehr Leistung brauche, heißt es FOG oder nichts.
Was kommt als Nächstes?
Sie sollten jetzt ein klares Verständnis davon haben, was ARW ist, wie es gemessen wird und warum es wichtig ist. Doch die Theorie ist nur die halbe Miete. Im zweiten Teil dieser Serie erkläre ich, wie sich ARW in realen Systemen manifestiert – von der Drift von Drohnen bis hin zu reinen Trägheitsmissionen – und wie Ingenieure wie wir es bei der Entwicklung berücksichtigen. Wir werden taktisch vorgehen: Softwarebeschränkungen, mechanische Isolierung, Fusionsstrategien und harte ARW-Schwellenwerte für kritische Anwendungen.
→ Weiter zu Teil 2: Design mit ARW im Hinterkopf
