Nachdem ich über ein Jahrzehnt mit Trägheitssensoren gearbeitet habe, weiß ich aus erster Hand, wie schnell sich die Systemanforderungen entwickeln. Vor einigen Jahren reichte eine 6-Achsen-IMU – nur Gyroskope und Beschleunigungsmesser – für die meisten Navigations- und Steuerungsaufgaben aus. Aber das ist nicht mehr der Fall. Heutige Plattformen erfordern mehr als nur Bewegung – sie benötigen Orientierung, Höhe und Umgebungsbewusstsein. Deshalb bin ich für komplexe Anwendungen zu 10-Achsen-MEMS-IMUs greife. Durch Hinzufügen eines Magnetometers und eines barometrischen Sensors gewinnen wir zwei zusätzliche Datendimensionen: absolute Richtung und vertikale Positionierung. Das sind nicht nur Zahlen – sie ermöglichen eine stabile Steuerung in GNSS-freien Zonen, eine genaue Lokalisierung in Innenräumen und Präzision in mehrschichtigen Umgebungen. Je mehr Daten wir haben, desto mehr Probleme können wir lösen.
Eine 10-Achsen-MEMS-IMU bietet einen deutlichen Fortschritt gegenüber herkömmlichen 3- oder 6-Achsen-Sensoren, indem sie Gyroskope, Beschleunigungsmesser, Magnetometer und ein Barometer in einem kompakten Modul vereint. Diese umfassendere Sensorfusion ermöglicht nicht nur Bewegungsverfolgung, sondern auch die absolute Kurs- und Höhenerkennung – entscheidend für zuverlässige Navigation, Steuerung und Stabilität in komplexen oder GPS-freien Umgebungen.
Möchten Sie wissen, wie die einzelnen Sensoren funktionieren und warum sie wichtig sind? Lassen Sie uns alle Komponenten genauer betrachten.

Inhaltsverzeichnis
Was bedeutet „10-Achsen“ wirklich?
In der Industrie kombiniert eine 10-Achsen-MEMS-IMU typischerweise vier Sensortypen in einem einzigen kompakten Modul:
- 3-Achsen-Gyroskope für Rotationsbewegungen
- 3-Achsen-Beschleunigungssensoren für lineare Beschleunigung und Neigung
- 3-Achsen-Magnetometer für absolute Kursrichtung
- 1-Achsen-Luftdrucksensor zur Höhenschätzung
Diese Kombination liefert volle 10 Grad Trägheits- und Umgebungssensorik und verschafft Ingenieuren Zugriff auf ein umfassenderes und vollständigeres Bild der Plattformbewegung und räumlichen Ausrichtung – insbesondere in Umgebungen mit GNSS-Problemen.

Gyroskop-Winkelgeschwindigkeit im Kern von 10-Achsen-MEMS-IMUs
Das Gyroskop ist die Grundlage jeder 10-Achsen-MEMS-IMU und liefert präzise Winkelgeschwindigkeitsdaten entlang der X-, Y- und Z-Achse. Es ermöglicht die Lagebestimmung und Stabilisierung schnell beweglicher Plattformen in Echtzeit. In taktischen Systemen sind geringe Drift und hohe Reaktionsfähigkeit entscheidend.
Schlüsselparameter:
| Sensor | Parameter | Beschreibung |
|---|---|---|
| Gyroskop | Winkelbereich | Misst die gesamte 3-Achsen-Rotationsbewegung |
| Bias-Instabilität | Unterstützt die langfristige Driftkorrektur | |
| Geräuschentwicklung | Ermöglicht reibungsloses, ruckelfreies Tracking | |
| Bandbreite und Ausgaberate | Hochfrequente Daten für schnelle Reaktion |
Beschleunigungsmesser – Lineare Bewegungs- und Vibrationserfassung für präzise Navigation
Der Beschleunigungsmesser in einer 10-Achsen-IMU erfasst sowohl die dynamische Beschleunigung als auch die statischen Gravitationskräfte entlang dreier Achsen. Dies ermöglicht eine genaue Erfassung von Bewegung, Vibration und Neigungsausrichtung , was insbesondere bei Koppelnavigation oder ohne GNSS-Verbindung wichtig ist.
Schlüsselparameter:
| Sensor | Parameter | Beschreibung |
|---|---|---|
| Beschleunigungsmesser | Beschleunigungsbereich | Erkennt Stöße, Bewegungen und Neigungen |
| Bias-Instabilität | Ermöglicht hochauflösende Trägheitssensorik | |
| Grundrauschen | Reduziert falsche Bewegungsauslöser | |
| Bandbreite und Antwort | Geeignet für hochdynamische Umgebungen |
Magnetometer – Absolute Kursbestimmung zur langfristigen Orientierungskorrektur
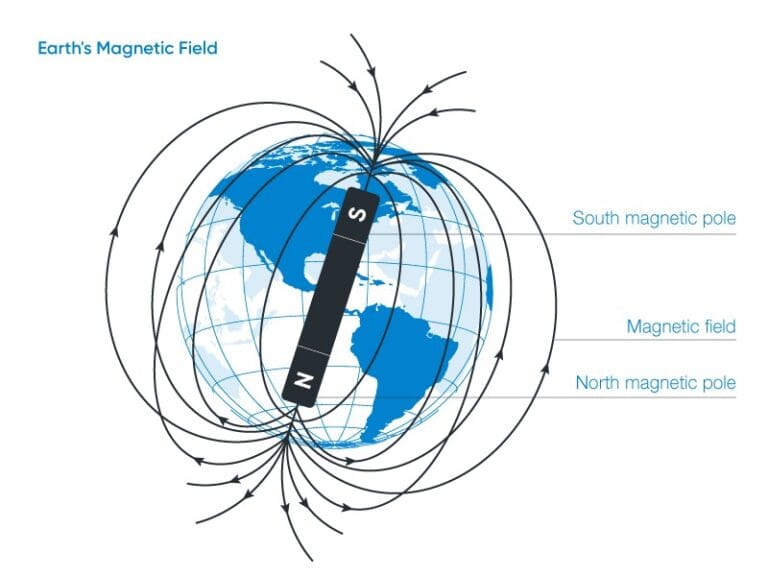
Das Magnetometer ergänzt die Kreiselsensorik, indem es einen stabilen Bezug zum Erdmagnetfeld bietet – unerlässlich für die Kursbestimmung bei langen Missionen. Es hilft bei der Korrektur von Drifts und ermöglicht eine zuverlässige Richtungsbestimmung , insbesondere in Innenräumen oder in Umgebungen mit eingeschränktem GPS-Empfang.
Schlüsselparameter:
| Sensor | Parameter | Beschreibung |
|---|---|---|
| Magnetometer | Magnetfeldbereich | Deckt eine breite Betriebsumgebung ab |
| Auflösung | Erfasst kleine Kursänderungen präzise | |
| Geräuscheigenschaften | Unterstützt eine konsistente Orientierungskorrektur |
Barometer – Vertikales Bewusstsein für 3D-Navigation
Der barometrische Drucksensor liefert eine 10-Achsen-MEMS-IMU und wandelt den Luftdruck in eine Höhenschätzung um . Dies ist wichtig für Indoor-UAVs, VTOL-Plattformen und intelligente Robotik, bei denen GNSS-Höhendaten möglicherweise nicht verfügbar sind.
Schlüsselparameter:
| Sensor | Parameter | Beschreibung |
|---|---|---|
| Barometer | Druckbereich | Ermöglicht Einsatzszenarien in großer Höhe |
| Auflösung | Erkennt kleine Höhenänderungen | |
| Messstabilität | Gewährleistet eine konsistente Positionierung der Z-Achse |
Warum machen 10-Achsen-IMUs in realen Anwendungen einen Unterschied?
3- oder 6-Achsen-IMUs können zwar grundlegende Bewegungen und Orientierungen erfassen, in komplexen Umgebungen mit GNSS-Problemen . Eine 10-Achsen-MEMS-IMU integriert Gyroskop-, Beschleunigungs-, Magnetometer- und Barometersensoren und bietet so ein umfassenderes Verständnis von Bewegung und Umgebung.
Diese umfangreicheren Daten ermöglichen:
- Absolute Kurskorrektur durch Magnetfeldmessung
- Vertikale Positionsbestimmung durch Luftdruckmessung
- Verbesserte Koppelnavigation bei fehlendem GPS oder in Innenräumen
- Höhere Robustheit gegenüber Drift, Vibration und Systemrauschen
Für Plattformen, die unabhängig denken, reagieren und navigieren müssen, bietet die 10-Achsen-Sensorik zusätzliche Dimensionen, die Standard-IMUs einfach nicht abdecken können.
Woher wissen Sie, ob Sie wirklich eine 10-Achsen-IMU benötigen?
Nicht jedes Projekt erfordert eine vollständige 10-Achsen-IMU. Wenn Ihre Anwendung jedoch Umgebungen ohne GPS, vertikale Mobilität oder lang anhaltende Kursstabilität umfasst, kann ein 10-Achsen-System unerlässlich sein.
Sie sollten die Wahl einer 10-Achsen-MEMS-IMU in Betracht ziehen, wenn:
- Sie benötigen eine absolute Richtung (nicht nur eine relative Drehung)
- Ihre Plattform muss in Innenräumen, unter der Erde oder in GNSS-beeinträchtigten Bereichen funktionieren
- Sie benötigen Höhenschätzung oder mehrstöckige Navigation
- Ihr System driftet mit der Zeit nur mit Gyro + Beschleunigungsmesser
- Sie möchten echtes räumliches 3D-Bewusstsein mit einem einzigen Sensormodul ermöglichen
Wenn einer der oben genannten Punkte zutrifft, ist die Aufrüstung von 6- auf 10-Achsen keine Überentwicklung, sondern dient der Missionssicherung.

Wo werden 10-Achsen-IMUs am häufigsten verwendet?
10-Achsen-IMUs sind nicht nur für Spezialsysteme gedacht – sie sind in vielen modernen Plattformen unverzichtbar geworden, in denen Bewegung, Orientierung und Umgebungswahrnehmung zusammenarbeiten müssen. In welchen Anwendungen werden sie am häufigsten eingesetzt?
1. Unbemannte Luftfahrzeuge (UAVs)
Eine 10-Achsen-IMU ermöglicht es UAVs, die Höhe mithilfe barometrischer Daten zu halten, Kursabweichungen mithilfe eines Magnetometers zu korrigieren und bei GNSS-Ausfällen oder unübersichtlichem Luftraum die Kontrolle zu behalten. Dies ist unerlässlich für autonomes Fliegen, VTOL-Stabilisierung und sichere Rückkehrfunktionen unter erschwerten Navigationsbedingungen.
2.Bodenroboter und UGVs
In Tunneln, Kellern oder Anlagen ohne GPS-Anbindung nutzen UGVs Trägheitssysteme zur Navigation. Mit einer 10-achsigen IMU erhalten Roboter vertikale Orientierung und können Kurskorrekturen vornehmen. So können sie Etagen, Rampen oder komplexe Kurven mit höherer Positionsgenauigkeit befahren, selbst wenn keine Kartierungsinfrastruktur vorhanden ist.
3.Präzisionsgelenkte Systeme und Munition
Kompakte, hochbelastbare Anwendungen wie intelligente Munition profitieren von einem vollständigen 10-Achsen-Feedback: Gyroskope zur Orientierung, Beschleunigungsmesser zur Beschleunigung, Magnetometer zur Kurskorrektur und Barometer zur Höhenprofilierung. Dies ermöglicht präzises Zielen, adaptive Steuerung und stabile Führung auch bei GNSS-Verlust oder Gegenmaßnahmen.
4. Kardanringe und optische Nutzlasten
Bei stabilisierter Optik kann die IMU-Drift die Zielgenauigkeit mit der Zeit beeinträchtigen. 10-Achsen-IMUs verwenden Magnetometer zur Azimutkorrektur und Barometer zur Neigungs-/Höhenreferenz. So bleiben Kameras oder Sensoren auch auf instabilen oder beweglichen Plattformen mit pixelgenauer Präzision auf das Ziel gerichtet.
5.Indoor-Navigation und Smart Mobility
Ob Lieferroboter, AR-Headsets oder tragbare Tracker: 10-Achsen-IMUs unterstützen die vollständige Orientierung und 3D-Bewegungsverfolgung in Innenräumen. Barometer erkennen Höhenunterschiede zwischen Stockwerken, während Magnetometer Orientierungshilfen in Stahlrahmenumgebungen liefern. So wird die Navigation in Innenräumen ohne Beacons oder GNSS präziser und zuverlässiger.
GuideNavs 10-Achsen-IMU: Für die Integration entwickelt
Bei GuideNav kombinieren unsere 10-achsigen MEMS-IMUs einen taktischen 6-achsigen Kern mit integriertem Magnetometer und Barometer und bieten so vollständige Zustandserfassung für dynamische Umgebungen ohne GNSS-Unterstützung. Jede Einheit ist temperaturkalibriert und für den Einsatz in der Praxis ausgelegt, nicht nur für Labortests.
Wir unterstützen umfassende Anpassungen – Ausgabefilterung, Bandbreitenoptimierung, Schnittstellenanpassung oder strukturelle Anpassungen – um Ihren Plattformanforderungen gerecht zu werden.
Was uns auszeichnet, sind nicht nur die Sensorspezifikationen, sondern auch unsere Arbeitsweise:
- Technische Unterstützung vom Prototyping bis zum Rollout
- Anpassbare Schnittstellen und Konnektoren, zugeschnitten auf Ihre Plattform
- Stabile Produktion mit Lebenszykluskontinuität
- Exportfreundliche, ITAR-freie Verfügbarkeit
Wenn Ihr System auf eine zuverlässige Orientierung und Höhenerkennung angewiesen ist, sind unsere 10-Achsen-IMUs zur Integration bereit.