
Інерціальний вимірювальний прилад (IMU) надійний у всьому світі
Інерційна одиниця вимірювання
15 000+ систем IMU працюють у 35+ країнах
Індивідуальні рішення, яким довіряють ключові гравці світу
Рішення GuideNav щодо інерційних вимірювальних пристроїв (IMU) розроблені для забезпечення виняткової продуктивності в аерокосмічних, оборонних і промислових застосуваннях. Незалежно від того, чи потрібен вам компактний і економічно ефективний MEMS IMU або надточний FOG IMU, ми пропонуємо передову технологію, якій довіряють у найвимогливіших середовищах.
Рекомендована модель imu на основі MEMS від Guidenav
ПРЕОБРАЗОВАНІ МОДЕЛІ MEMS IMU
- Економічно вигідний
- Діапазон гіроскоп: ± 500 °/с
- Нестабільність зміщення: ≤ 2 °/год
- Стабільність зміщення: ≤ 10 °/год
- Вага: ≤ 10 г
- Протокол: Уарт

- 10-осі МЕМС ІМУ
- Діапазон гіроскоп: ± 450 °/с
- Нестабільність зміщення: ≤ 2 °/год
- Стабільність зміщення: ≤ 4 °/год
- Вага: ≤ 40G
- Протокол: SPI
- 10-осі МЕМС ІМУ
- Діапазон гіроскоп: ± 450 °/с
- Нестабільність зміщення: ≤ 0,8 °/год
- Стабільність зміщення: ≤ 3 °/год
- Вага: ≤ 40G
- Протокол: SPI

- Середньо-висока точність
- Діапазон гіроскоп: ± 320 °/с
- Нестабільність зміщення: ≤ 0,4 °/год
- Стабільність зміщення: ≤ 2 °/год
- Вага: ≤ 10 г
- Протокол: RS422

- Широкий діапазон гіроскоп
- Діапазон гіроскоп: ± 2000 °/с
- Нестабільність зміщення: ≤ 3 °/год
- Стабільність зміщення: ≤ 10 °/год
- Вага: ≤ 30G
- Протокол: Уарт

- Hund-Hard до 20 000г
- Діапазон гіроскоп: до 6000 °/с
- Нестабільність зміщення: ≤ 3 °/год
- Стабільність зміщення: ≤ 10 °/год
- Вага: ≤ 50G
- Протокол: Уарт

- Висока точність
- Діапазон гіроскоп: ± 450 °/с
- Нестабільність зміщення: ≤ 0,2 °/год
- Стабільність зміщення: ≤ 1 °/год
- Вага: ≤ 40G
- Протокол: RS422

- Ультра-висока
- Діапазон гіроскоп: ± 400 °/с
- Нестабільність зміщення: ≤ 0,1 °/год
- Стабільність зміщення: ≤ 0,5 °/год
- Вага: ≤ 55 г
- Протокол: RS422
Рекомендований оптоволоконний інерціальний вимірювальний пристрій Guidenav
ПРЕОБРАЗОВАНІ МОДЕЛІ FOG IMU

- Середня точність
- Стабільність зміщення (10с) ≤0,1 °/год
- Gyro Angular Random Walk: ≤0,02 град/√h
- діапазон ± 500 °/с
- Вага: <900 грам
- Середня-висока точність
- Стабільність зміщення (10с) ≤0,05 °/год
- Gyro Angular Random Walk: ≤0,005 град/√h
- діапазон ± 500 °/с
- Вага: <1200 грам

- Висока точність
- Стабільність зміщення (10с) ≤0,01 °/год
- Gyro Angular Random Walk: ≤0 0005 град/√h
- діапазон ± 300 °/с
- Вага: <5000 грам
- Надвисока точність
- Стабільність зміщення (10с) ≤0,005 °/год
- Gyro Angular Random Walk: ≤0.0003 град/√h
- діапазон ± 500 °/с
- Вага: <5000 грам
Отримайте індивідуальне рішення зараз
Ваш проект заслуговує на рішення, яке точно відповідає вашим вимогам. Щоб забезпечити найкращі інерційні вимірювальні одиниці (IMU) для ваших потреб, ми запрошуємо вас поділитися конкретними параметрами та вимогами до продуктивності ваших програм. Незалежно від того, чи йдеться про точність, стабільність чи обмеження розміру, наша команда готова допомогти вам знайти ідеальний варіант.
Зміст
Завантажте цю сторінку у форматі PDF
Щоб заощадити ваш час, ми також підготували PDF-версію, яка містить увесь вміст цієї сторінки, лише залиште свою електронну адресу, і ви негайно отримаєте посилання для завантаження.
Представляємо інерціальний вимірювальний пристрій (IMU)
Що таке інерційна одиниця вимірювання?
Інерційний вимірювальний пристрій (IMU) — це пристрій, який вимірює прискорення об’єкта, кутову швидкість і іноді магнітне поле, надаючи дані про його рух і орієнтацію. Зазвичай він складається з акселерометрів, гіроскопів і іноді магнітометрів. IMU мають вирішальне значення для систем, які вимагають точної навігації, таких як аерокосмічна, оборонна та робототехніка, де вони допомагають підтримувати точне позиціонування та стабільність, не покладаючись на зовнішні орієнтири, такі як GPS.
Застосування інерційної одиниці вимірювання (IMU)
Застосування інерціального вимірювального пристрою (IMU)
01
Космонавтика та авіація
IMU є життєво важливими для навігації та контролю літака. Вони допомагають підтримувати орієнтацію та надають дані в режимі реального часу для систем автопілота, допомагаючи літакам триматися курсу та покращуючи безпеку польоту.
02
оборони та військових
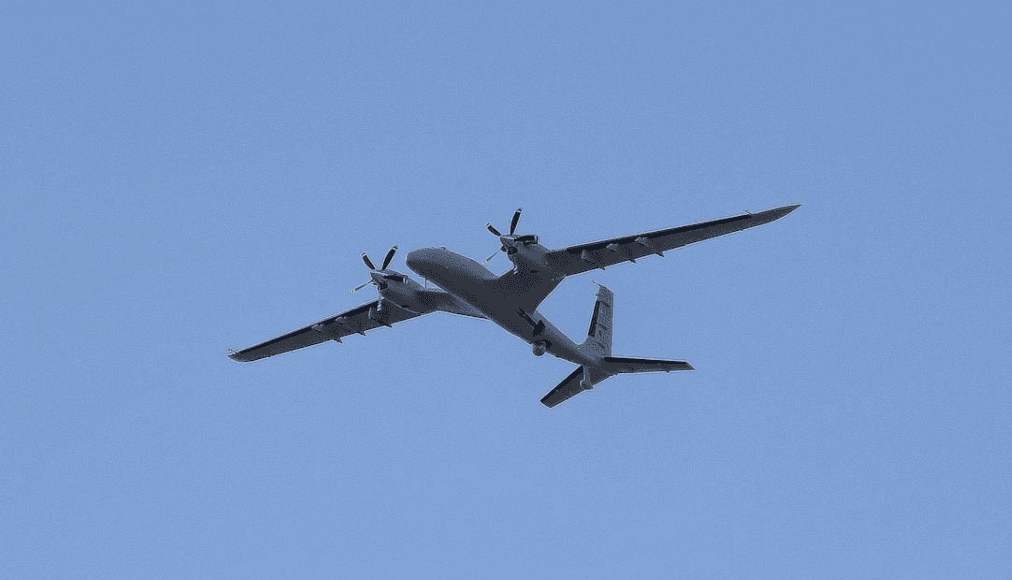
IMU широко використовуються в ракетах, безпілотниках і військових транспортних засобах для забезпечення точного відстеження руху, навігації та наведення на ціль. Вони дозволяють автономним системам точно функціонувати навіть у середовищах, де GPS заборонено.
03
Автономні транспортні засоби та дрони
У безпілотних автомобілях і дронах IMU забезпечують постійний зворотний зв’язок щодо орієнтації, швидкості та руху, допомагаючи стабілізувати політ і забезпечити точну навігацію в складних умовах.
04
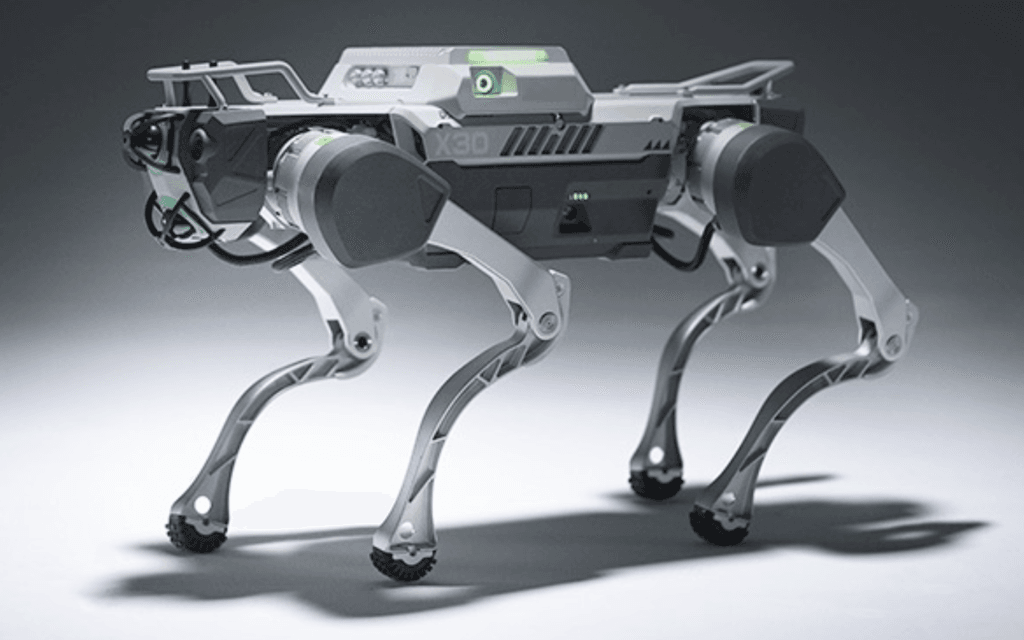
Робототехніка
ІМУ мають вирішальне значення в робототехніці для точного керування рухом. Вони використовуються в роботах для відстеження положення та орієнтації, забезпечуючи ефективне й автономне пересування промислових, медичних і сервісних роботів.
05
Геофізична зйомка
У геофізичних дослідженнях IMU використовуються в обладнанні для виявлення та вимірювання сейсмічних рухів, надаючи цінні дані для наукових досліджень і розвідки ресурсів.


чому інерційна одиниця вимірювання
Чому варто вибрати IMU, а не лише гіроскоп?
У той час як інерціальні вимірювальні пристрої (IMU) і гіроскопи вимірюють кутову швидкість, IMU забезпечує більш комплексне рішення, об’єднуючи кілька датчиків, щоб запропонувати ширший діапазон даних руху та орієнтації. Ось основні причини
Комплексне відстеження руху
У той час як гіроскоп вимірює лише кутову швидкість, IMU поєднує акселерометри та іноді магнітометри для відстеження як лінійного прискорення, так і кутового обертання, пропонуючи повний 3D-профіль руху.з точнішим позиціонуванням
можуть з часом страждати від дрейфу. IMU виправляє це, використовуючи дані акселерометра, забезпечуючи стабільнішу та точнішу орієнтацію та позиціонування протягом тривалих періодів.Краща продуктивність у середовищах із забороною GPS.
IMU ідеально підходять для додатків, де GPS недоступний, наприклад у приміщенні, під водою чи в космосі, оскільки вони вимірюють як прискорення, так і обертання, пропонуючи повні навігаційні дані.Спрощена конструкція системи
IMU об’єднує кілька датчиків в один компактний пристрій, зменшуючи складність системи та потребу в окремих акселерометрах і гіроскопах.




Основні параметри інерціального вимірювального блоку (IMU)
Основні характеристики інерціального вимірювального пристрою (IMU)
Нестабільність зміщення (гіроскоп)
Вимірює, наскільки стабільний гіроскоп у часі без зовнішніх вхідних даних, зазвичай надається в °/год. Нижчі значення вказують на вищу стабільність, що є критичним для точних програм, таких як навігація та вказівки.Довільне блукання кута
Вказує рівень шуму при вимірюванні кутової швидкості в °/√год. Нижче випадкове блукання забезпечує кращу продуктивність у довгострокових операціях.Діапазон вимірювання
Вказує максимальне прискорення (g) або кутову швидкість (°/с), які може вимірювати IMU. Більш широкий діапазон дозволяє працювати з більш динамічними середовищами.Пропускна здатність
Визначає, як швидко IMU може реагувати на зміни, зазвичай вимірюється в Гц. Вища пропускна здатність підтримує додатки, які вимагають швидкого оновлення даних, наприклад дрони або робототехніку.Стійкість до навколишнього середовища
Включає діапазон робочих температур і стійкість до вібрації та ударів. Це гарантує надійну роботу IMU в суворих умовах, таких як аерокосмічні або військові застосування.
MEMS IMU проти оптоволоконного IMU: що краще?
Вибір між MEMS і волоконно-оптичних гіроскопів (FOG) залежить від конкретних вимог вашого проекту. Стандартні MEMS IMU компактні, економічно ефективні та ідеально підходять для програм із помірними потребами в точності. Однак удосконалення технологій тепер дозволяє високоточним MEMS IMU досягати нестабільності зсуву лише 0,1°/год , що робить їх придатними для деяких військових і аерокосмічних застосувань, де традиційно домінують FOG IMU.
Проте FOG IMU залишаються кращим вибором для застосувань, які вимагають надвисокої точності , довгострокової стабільності та надійності в екстремальних умовах. Нижче наведено детальне порівняння, яке допоможе вам вирішити:
| Особливість | MEMS IMU | ТУМАН ІМУ |
|---|---|---|
| Точність | Стандартні MEMS IMU забезпечують помірну точність. Високоточні MEMS IMU можуть досягати нестабільності зсуву лише 0,1°/год , що можна порівняти з FOG IMU початкового рівня. | Забезпечує надвисоку точність із нестабільністю зсуву лише 0,001°/год , що робить їх ідеальними для довготривалих критично важливих операцій. |
| Розмір і вага | Компактні та легкі, що робить їх придатними для систем із суворими обмеженнями розміру та ваги, таких як БПЛА чи робототехніка. | Більший і важчий, розроблений для систем, де продуктивність переважає питання розміру. |
| Екологічна толерантність | Покращена міцність при ударах, вібрації та коливаннях температури, особливо в передових конструкціях MEMS. Надійний для більшості промислових і військових застосувань. | Надзвичайна надійність в екстремальних умовах, включаючи високі удари, вібрацію та тривалу експлуатацію. |
| Вартість | Економічніший, особливо для застосувань, де достатньо стандартної точності. Високоточні MEMS IMU доступніші, ніж FOG IMU за порівнянну точність. | Вища вартість через складну оптичну технологію, але виправдана для систем, які вимагають неперевершеної стабільності та точності. |
| Додатки | Підходить для навігації загального призначення в БПЛА, робототехніці, промислових системах і деяких додатках військового рівня, якщо використовується високоточна MEMS. | Переважний для аерокосмічної галузі, ракет, підводних човнів і критично важливих оборонних систем, які потребують тривалої стабільності та надвисокої точності. |
Представляємо інерціальний вимірювальний пристрій (IMU)
Шестиосьовий і
дев’ятиосьовий інерційний вимірювальний блок
Вивчаючи інерційні одиниці вимірювання (IMU), ви часто зустрічатимете такі терміни, як «шестиосьовий IMU» та «дев’ятиосьовий IMU». Ці описи стосуються кількості та типу датчиків, вбудованих у пристрій. Розуміння різниці між шестиосьовим і дев’ятиосьовим IMU може допомогти вам вибрати правильний датчик для конкретного застосування.
| Особливість | Шестиосьовий IMU | Дев'ятиосьовий IMU |
|---|---|---|
| компоненти | 3-осьовий акселерометр 3-осьовий гіроскоп | 3-осьовий акселерометр 3-осьовий гіроскоп 3-осьовий магнітометр |
| Функціональність | Вимірює лінійне прискорення та кутову швидкість | Вимірює лінійне прискорення, кутову швидкість і абсолютний курс |
| Точність | Добре для короткострокової стабільності | Підвищена точність із зменшенням дрейфу з часом |
| Додатки | Дрони, робототехніка, споживча електроніка | Навігаційні системи, доповнена реальність, автономні транспортні засоби |
| Вартість | Загалом доступніше | Зазвичай вище через додатковий датчик |
Калібрування інерціального вимірювального пристрою
Що таке калібрування інерціального вимірювального пристрою?
Правильне калібрування інерційного вимірювального пристрою має вирішальне значення для забезпечення його роботи з необхідним рівнем точності для конкретного застосування. Без калібрування дані з IMU можуть бути непослідовними, що призведе до неправильної поведінки системи. Це може вплинути на точність навігації в дронах, відстеження траєкторії в аерокосмічних додатках або стабільність у робототехніці.
IMU зазвичай складаються з акселерометрів, гіроскопів і іноді магнітометрів. Кожен із цих датчиків може страждати від різних джерел помилок, таких як коливання температури, механічні навантаження або виробничі допуски. Методи калібрування допомагають пом’якшити ці проблеми, щоб забезпечити виведення точних і надійних даних.
Інерційний вимірювальний блок проти AHRS проти INS
IMU проти AHRS проти INS: у чому різниця?
- IMU (Інерціальний вимірювальний пристрій) : Вимірює прискорення та кутову швидкість. Він надає необроблені дані про рух, але не обчислює орієнтацію чи положення.
- AHRS (система відліку положення та курсу) : розширює IMU, надаючи інформацію про орієнтацію в реальному часі (нахил, крен, поворот) і інформацію про курс, часто за допомогою магнітометрів і GPS.
- INS (Інерціальна навігаційна система) : поєднує функції IMU та розширені алгоритми для надання даних про місцезнаходження, швидкість та орієнтацію, не покладаючись на зовнішні орієнтири, такі як GPS.
| Особливість | ІДУ | AHRS | INS |
|---|---|---|---|
| призначення | Вимірює прискорення та кутову швидкість | Надає інформацію про орієнтацію в реальному часі (нахил, крен, поворот) і курс | Надає повні навігаційні дані: положення, швидкість та орієнтацію |
| Датчики | Акселерометр, гіроскоп (іноді магнітометр) | IMU + магнітометр (іноді GPS) | IMU + розширені алгоритми (часто з GPS або зовнішніми входами) |
| Виведення даних | Необроблені дані (прискорення, кутова швидкість) | Орієнтація (тангаж, крен, поворот), курс | Положення, швидкість і орієнтація в часі |
| зовнішній | Потрібні зовнішні системи (GPS, магнітометри) для повного орієнтування | Використовує магнітометри та GPS для корекції дрейфу | Працює незалежно (може бути доповнено GPS) |
| Тип FOG IMU | Ціновий діапазон | застосування |
|---|---|---|
| FOG IMU початкового рівня | $10,000 - $30,000 | Загальне комерційне чи промислове використання, дрони, базові автономні транспортні засоби |
| FOG середнього класу IMU | $30,000 - $70,000 | Військове застосування, аерокосмічна промисловість, високоточна морська навігація |
| Висококласні FOG IMU | $70,000 - $100,000+ | Критичні застосування (наведення ракет, аерокосмічна промисловість, системи високоточного захисту) |
Який ціновий діапазон FOG IMU
Діапазон цін на
інерціальний вимірювальний прилад (IMU) на основі ВОГ
Ціна інерціального вимірювального пристрою (IMU) на основі оптоволоконного гіроскопа (FOG) може значно відрізнятися залежно від конкретного застосування, вимог до продуктивності та додаткових функцій. До факторів, що впливають на ціну, відносяться:
- Технічні характеристики (наприклад, точність, стабільність)
- Розмір, вага та енергоспоживання (SWaP-C)
- Захист навколишнього середовища (наприклад, підвищення міцності для суворих умов)
- Налаштування для конкретних потреб програми
Щоб отримати інформацію про ціни на MEMS IMU, відвідайте нашу сторінку MEMS IMU
Керівництво з вибору інерційної одиниці вимірювання
Як вибрати
інерційну одиницю вимірювання?
КРОК 1
Визначте свою програму
Який ваш основний випадок використання? (наприклад, аерокосмічна промисловість, оборона, робототехніка, автомобільна промисловість, побутова електроніка)
Який рівень точності та точності потрібен? (наприклад, субступінь, висока точність)
КРОК 2
Тип IMU: MEMS проти FOG
- MEMS : доступний, компактний та ідеально підходить для низької та середньої точності.
- FOG : високоточний, надійний і підходить для вимогливих застосувань.
КРОК 3
Визначити вимоги до точності
Виберіть потрібний рівень точності (наприклад, градуси на годину для гіроскопів) залежно від вашої програми.
КРОК 4
Розмір і вага
Переконайтеся, що IMU відповідає обмеженням простору та потужності вашої системи, особливо для дронів або портативних пристроїв.
КРОК 5
Оцініть умови навколишнього середовища
Виберіть IMU, який може протистояти таким факторам навколишнього середовища, як екстремальні температури, удари та вібрація.
КРОК 6
Параметри налаштування та інтеграції
Переконайтеся, що IMU підтримує правильні інтерфейси та вихід даних для бездоганної інтеграції у вашу систему.
Виробник інерціального вимірювального приладу
Чому варто обрати Guidenav?
Ключові гравці довіряють
Нашій передовій інерціальній навігаційній продукції довіряють провідні організації в аерокосмічному, оборонному, комерційному та промисловому секторах з понад 25 країн. Наша репутація надійності та точності відрізняє нас.
Найвища продуктивність
Наші продукти забезпечують найвищу продуктивність із відмінною стабільністю зміщення. Розроблений для найвибагливіших додатків, наш IMU на основі MEMS може досягати нестабільності зміщення з точністю до ≤0,1°/год.
Перевірено в суворих умовах
Наші рішення створені, щоб витримувати екстремальні умови, забезпечуючи стабільну продуктивність у суворих умовах.
Чудова продуктивність під час вібрації
Наша технологія MEMS і FOG IMU чудово працює в умовах високої вібрації, забезпечуючи точність і стабільність навіть у найскладніших умовах експлуатації.
Система PLUG & PLAY
Наші системи створені для легкої інтеграції, пропонують рішення plug-and-play, які спрощують встановлення та скорочують час налаштування, дозволяючи вам зосередитися на своїй місії.
БЕЗ ІТАР
Наші продукти не містять ITAR, пропонуючи вам перевагу легших міжнародних транзакцій і менше регуляторних перешкод. Виберіть GuideNav для безперебійних глобальних операцій.
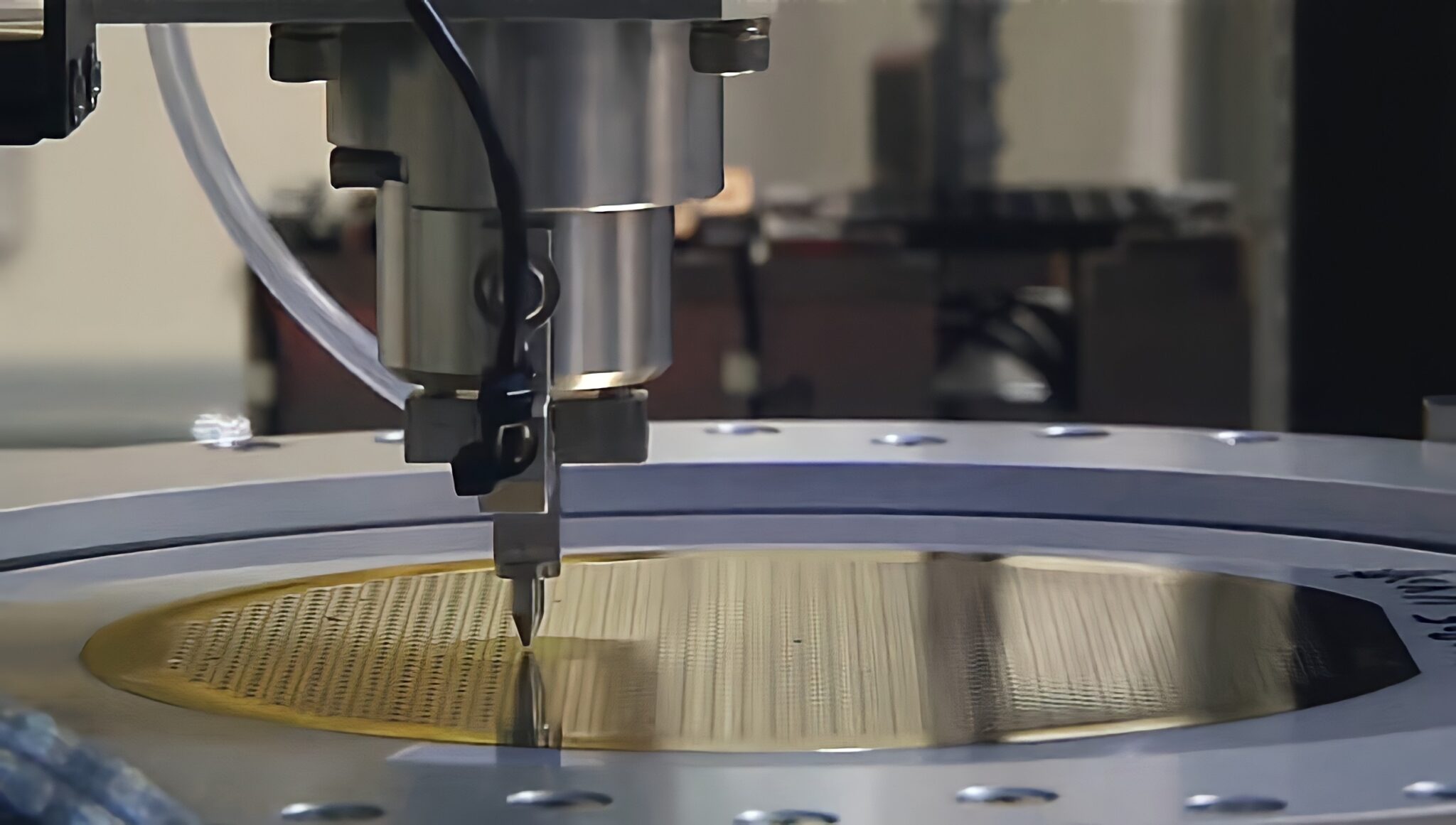
Наша фабрика - дивіться, щоб повірити








Чому обирають нас
Комплексні рішення для всіх ваших навігаційних потреб
Комерційне покриття
Стабільність зсуву: >0,2°/год
Рішення: Гіроскоп на основі MEMS/IMU/INS
Застосування: автомобільна навігація, безпілотні літальні апарати, транспорт, робототехніка тощо.
Покриття тактичного рівня
Стабільність зсуву: 0,05°/год-0,2°/год.
Рішення: гіроскоп на основі волоконної оптики та MEMS/IMU/INS
Застосування: операції з бронетехнікою, зенітна артилерія, точне націлювання тощо.
Ступінь навігації
Стабільність зсуву: ≤0,05°/год.
Рішення: волоконна оптика та кільцевий лазерний гіроскоп/IMU/INS
Застосування: наведення на середні та великі відстані, військова авіація, супутники




FAQs Інерціальний вимірювальний блок
Відповіді на Ваші запитання
Основними функціями IMU є надання інформації про орієнтацію в реальному часі (наприклад, про кути тангажу, крену та повороту) і інформацію про рух (наприклад, про лінійне прискорення та кутову швидкість). Ці дані допомагають таким системам, як роботи, дрони, мобільні пристрої чи розумні транспортні засоби з навігацією, позиціонуванням і контролем.
GPS надає інформацію про географічне розташування та абсолютну швидкість через супутникове позиціонування, тоді як IMU покладається на вимірювання внутрішнього датчика, щоб забезпечити відносний стан руху та зміни орієнтації. IMU можуть працювати без зовнішніх сигналів позиціонування, що робить їх особливо корисними в середовищах, де сигнали GPS недоступні або ненадійні (наприклад, у приміщенні, тунелях або під водою). Як правило, поєднання даних IMU та GPS призводить до більш точного та надійного позиціонування та навігації.
Типові результати IMU включають:
- Дані трьохосьового акселерометра (X, Y, Z)
- Дані тривісного гіроскопа (X, Y, Z)
- (Якщо є) Дані трьохосьового магнітометра
- (Якщо є) Дані про барометричний тиск і висоту
Ми пропонуємо два основних типи IMU:
- MEMS IMU : менші, легші та доступніші, ідеальні для додатків середньої точності. Ми також пропонуємо високоточні MEMS IMU , які забезпечують рівні точності до 0,1°/год FOG початкового рівня .
- FOG IMU : високоточні та стабільні, які використовуються у складних програмах, таких як аерокосмічні, оборонні та висококласні навігаційні системи.
Так, IMU від GuideNav добре підходять для застосування у військовій сфері . З акцентом на високу точність, довговічність і налаштування, наші IMU відповідають високим вимогам для чутливих оборонних операцій, включаючи місії підводної розвідки, спостереження та розвідки.
Так, ви можете замінити існуючий IMU на наш продукт. Наш IMU розроблено для сумісності з широким спектром систем і програм. Ось кілька ключових моментів, які слід враховувати:
Сумісність: наш IMU підтримує стандартні протоколи зв’язку (такі як SPI, I2C, UART) і пропонує аналогічні або покращені характеристики порівняно з більшістю існуючих IMU. Це гарантує, що інтеграція з поточною системою буде простою.
Покращена продуктивність: наш IMU забезпечує вищу точність, нижчий рівень шуму та кращу стабільність, що може підвищити загальну продуктивність вашої програми.
Додаткові функції: залежно від моделі, наші IMU можуть містити додаткові датчики (наприклад, магнітометри) і розширені можливості обробки даних, пропонуючи більш повні дані про рух і орієнтацію.
Підтримка та документація: ми надаємо детальну документацію та технічну підтримку, щоб допомогти вам у процесі заміни, забезпечуючи плавний перехід без значних простоїв.
Налаштування: якщо у вас є особливі вимоги, наша команда може працювати з вами, щоб налаштувати параметри IMU або мікропрограму, щоб краще відповідати потребам вашої програми.