Ви коли -небудь намагалися інтегрувати навігаційну систему, лише щоб зрозуміти, що вона взагалі не дає позиції?
Це трапляється, коли люди плутають ІМУ з інс. Це звучить технічно, але наслідки реальні: неправильний вибір обладнання, витрачений бюджет та системи, які просто не працюють, як очікувалося. Виправлення? Розуміння ключових відмінностей між ІМУ, INS та тим, що насправді розроблено. Цей посібник проведе вас через нього - все про звичайна англійська.
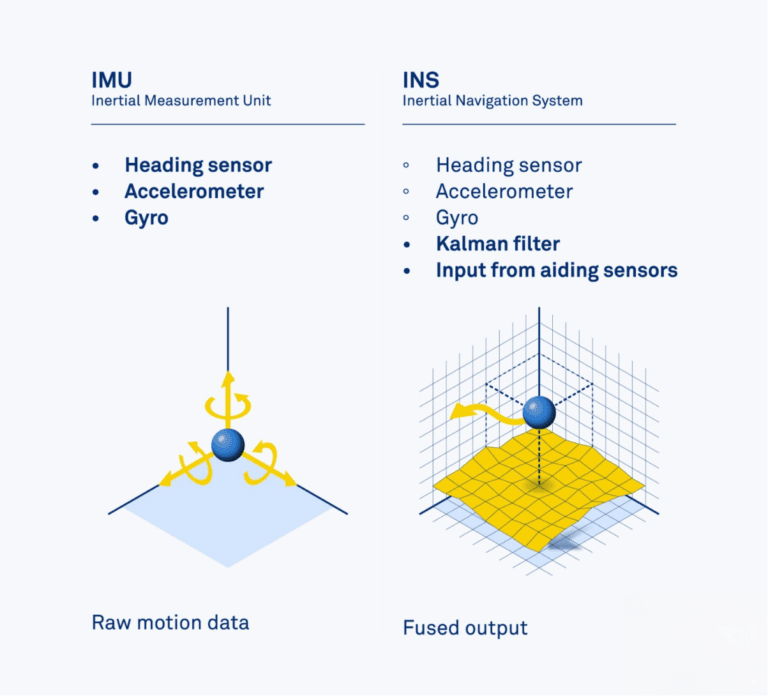
IMU вимірює рух, тоді як INS використовує дані IMU для обчислення положення та орієнтації з часом - IMU є датчиком, INS - це система.
Давайте прояснимо плутанину - крок за кроком.
Зміст

Що таке ІМУ?
Інерційна одиниця вимірювання (ІМУ) - це сенсорний пристрій, який вимірює прискорення та кутову швидкість . Зазвичай, побудований з технологіями MEMS, TAL або HRG, ІМУ включає акселерометри, гіроскопи , а іноді і магнітометри . Він виводить необроблені інерційні дані, що використовуються для оцінки руху в просторі. IMUS широко використовується в БПЛА, робототехніці, транспортних засобах та смартфонах. Однак самостійно вони не забезпечують позиції чи орієнтації , якщо не інтегруються з додатковою обробкою. IMUS відрізняється точністю, від недорогих комерційних класів до тактичних та навігаційних датчиків, таких як GMS400 Guidenav.

Що таке INS?
Інерційна навігаційна система (INS) -це повна система, яка використовує дані IMU для обчислення положення, швидкості та ставлення в режимі реального часу. Зазвичай він включає:
- Вбудований ІМУ
- Потужний бортовий процесор
- Алгоритми синтезу датчика (наприклад, фільтр Калмана )
- Часто модуль GNSS для допомоги
INS здійснює інтеграцію виходів ІМУ в режимі реального часу, щоб забезпечити безперервне навігаційне рішення. Через це він може працювати навіть у середовищах, що живуть GNSS, протягом обмеженого часу, що робить його важливим у аерокосмічних, морських та автономних місіях . Такі системи, як GFS120 та Guide2D Guidenav, є прикладом такої інтеграції.
Чим відрізняються IMUS та Inss?
Більшість людей спрощують це, кажучи: "INS - це просто ІМУ з модулем GNSS". Технічно це початок - але це далеко не всієї картини.
Так, INS включає в себе ІМУ в основі. Але він також інтегрує процесор, GNSS (часто із підтримкою RTK або SBAS), а іноді і зовнішніми датчиками, як кодери колеса, датчики швидкості, барометричні висоти або журнали швидкості доплерівської (DVL) . Ці доповнення дозволяють INS в режимі реального часу в режимі реального часу, доставляючи не лише рух, але оцінки високої впевненості в положенні, швидкості та орієнтації.
Подумайте про ІМУ як про термометр - він говорить вам про необроблені дані. INS - це звіт про погоду: відфільтровано, зростає та готовий діяти далі.
| Особливість | ІДУ | INS |
|---|---|---|
| Основна функція | Заходи прискорення та обертання | Обчислює повне положення, швидкість, орієнтація |
| компоненти | Акселерометр, гіроскоп | IMU + GNSS + процесор + додаткові датчики |
| Вихід | Дані про сировину руху | Злиті дані навігації (в режимі реального часу) |
| Підтримка GNSS | Ні | Вбудований (RTK/SBAS необов’язково) |
| Зовнішня допомога | Не застосовується | Одометр, DVL, швидкість повітря, висотомір тощо. |
Чи можете ви орієнтуватися лише з ІМУ?
Подумайте про ІМУ, як почуття руху із закритими очима. Ви можете сказати, що ви рухаєтесь вперед або повернувшись, але ви не маєте уявлення, де ви знаходитесь. Ось що відбувається, коли ви намагаєтесь орієнтуватися, використовуючи лише ІМУ.
Звичайно, ви можете інтегрувати прискорення з часом, щоб оцінити позицію. Але крихітні помилки накопичуються швидко, перетворюючись на величезні помилки протягом декількох секунд. Це називається Drift, і це робить окрему ІМУ ненадійною для навігації.
Вони чудово підходять для короткочасної стабілізації-як підтримувати рівний гімбал-але не для з'ясування, де ви знаходитесь або куди їдете. Для цього вам потрібні INS.
Як INS обробляє дані ІМУ?
На відміну від ІМУ, який відчуває лише рух, INS трактує цей рух і перетворює його на повне розуміння навігації. Це включає знання, де ви знаходитесь, як швидко ви рухаєтесь, і в якому напрямку ви стикаєтесь. Але це не відбувається автоматично. Це вимагає ланцюга ретельно розроблених кроків-згортання фізики, математики та виправлення в режимі реального часу-для перетворення сирих сигналів у надійну навігацію.
Давайте пройдемо процес:
1.
Все починається з ІМУ, який постійно вимірює прискорення (за допомогою акселерометрів) та кутової швидкості (через гіроскопи). Ці значення відображають, як система рухається в 3D -просторі.
➡ Цей крок надає INS свою усвідомлення сирого руху.
2. Обчисліть швидкість і положення
INS інтегрує прискорення для отримання швидкості, а потім інтегрує швидкість для оцінки положення з часом. Це повідомляє системі, наскільки вона проїхала від своєї відправної точки.
➡ Ось як INS відстежує рух - навіть без GPS.
3. Орієнтація Орієнтація
Обробляючи дані гіроскопа та посилаючись на вектори, такі як гравітація та магнітне поле Землі, INS визначає кочення, крок та позіхання - ваша повна 3D -орієнтація.
➡ Цей крок допомагає системі зрозуміти, як вона обертається або нахиляється.
4. Застосовуйте синтез датчика для точності
Дані ІМУ лише з часом дрейфують. INS використовує розумні алгоритми - як фільтри Kalman - для поєднання введення ІМУ з іншими датчиками:
- GNSS / RTK / SBAS
- Колесо одометри
- DVL або датчики швидкості
- Барометричні висотоці
Ці виправлення різко підвищують точність та довгострокову стабільність.
➡ Fusion підтримує систему надійною, навіть коли деякі датчики втрачають сигнал.
5. доставити вихід у режимі реального часу
Кінцевий вихід-це безперервний, в режимі реального часу потік позиції, швидкості та ставлення-багато разів на секунду та готовий до використання контролерів польотів, автопілотів або систем картографування.
➡ Це те, що робить INS повним навігаційним рішенням.
Продукти Guidenav INS дотримуються цієї архітектури-з двигунами Fusion, налаштованими на умови, що живуть GNSS, динамічні середовища та платформи з високою вібрацією. Результат: надійна навігація, яку ви можете довіряти, коли це найбільше важливо.
Коли ІМУ достатньо для вашої програми?
ІМУ - це все, що вам потрібно, якщо ваша система просто повинна відчувати рух , а не обчислити положення чи заголовок з часом. Це ідеально, коли ви реагуєте на рух, не намагаючись відстежувати абсолютне місце.
Поширені випадки використання включають:
Стабілізація камери
Виявляє вібрацію або нахил, щоб допомогти двигунам підтримувати камеру стабільно.
Відстеження жестів
В AR/VR або носій, де ви дотримуєтесь руху - не точне положення.
Короткострокова орієнтація
Використовується в безпілотниках або роботах під час запуску, наведення наведення або швидких маневрів.
Підтримка контролю польоту
У поєднанні з GNSS або оптичним потоком, IMUS забезпечує швидкий зворотний зв'язок щодо стабілізації безпілотників.
Просто майте на увазі: Імус дає лише сире прискорення та обертання. Якщо вам потрібна орієнтація або швидкість, вам доведеться самостійно побудувати математику - філтерів, корекцію дрейфу тощо.
Якщо це в межах можливості вашої системи, ІМУ - це легке, доступне та ефективне рішення.
Коли вам справді потрібно повна інс?
Вам потрібні повні INS, коли ваша система повинна постійно знати точне положення та орієнтацію - особливо в умовах, де GNSS може вийти з ладу або недоступний.
Типові випадки використання включають:
- , що живуть GNSS
- Високодинамічні платформи: такі як безпілотники, ракети та позашляхові транспортні засоби, які потребують швидких, точних оновлень
- Мертве розрахунку: де система повинна підтримувати навігацію між сигналами GNSS - або без GNSS
- Точні критичні завдання: такі як картографування, націлювання або автономне водіння
У цих ситуаціях лише ІМУ швидко дрейфував би, що призвело до ненадійних результатів. INS вирішує це шляхом злиття інерційних даних за допомогою GNSS та додаткових датчиків, таких як DVL, Odometers або Altimeters.
Які поширені помилки у виборі ІМУ чи INS?
Будемо чесними - коли мова йде про інерційні датчики, легко здійснити неправильний дзвінок, особливо якщо ви новачок у цій галузі. Я бачив, як команди вибирають неправильний інструмент більше разів, ніж я можу порахувати. І це рідко стосується технології - це стосується непорозуміння проблеми.

Ось, де зазвичай речі виходять з доріжки:
Помилка №1: Думаючи, що ІМУ дає вам позицію
Це не так. IMU говорить лише про те, як швидко ти рухаєшся чи повертаєшся. Якщо ви сподіваєтесь на координати в режимі реального часу поза коробкою-ви будете розчаровані.
Помилка №2: Використання ІМУ початкового рівня для вимогливої роботи
Недостатній датчик може виглядати добре на папері, але як тільки ви прив’язаєте його до швидкоплинного безпілотника або робота, шум і дрейф зруйнують ваші дані.
Помилка №3: Плата за інс, коли ІМУ зробить трюк
Якщо все, що вам потрібно, - це стабілізувати камеру або виявити базову орієнтацію, повна інс є надмірною. Не вирішуйте проблему 300 доларів з рішенням 3000 доларів.
Помилка №4: Забуття реального середовища
Лабораторні характеристики не завжди відображають продуктивність поля. Висока вібрація, екстремальні температури або ударні навантаження можуть швидко викинути дешеві датчики.
Помилка №5: недооцінка зусиль з інтеграції
Дані RAW IMU не підкреслюють. Якщо у вас немає правильного програмного забезпечення, фільтрів або алгоритмів, навіть найкращий датчик буде недооціненим.
Яку підтримку пропонує Guidenav для вибору IMU/INS?
У Guidenav ми не просто доставляємо датчики - ми допомагаємо вам побудувати правильну систему . Ми пропонуємо:
- Консалтинг один на один
- Збіг продуктивності IMU/Ins
- Інтеграційні посібники для БПЛА, УГВ та морських систем
- Набори доступу та оцінювання даних
- Швидка підтримка інженерії реагування
Незалежно від того, що ви будуєте БПЛА з низькою потужністю або навігаційну систему, що перебуває у GNSS, ми допомагаємо вам вибрати між MEMS IMU, туманом ІМУ або повними INS на основі вашого профілю місії.