Температурний дрейф інерційного модуля (ІМУ) є стійким джерелом похибки гіроскопа: зі зміною температури зміщення гіроскопа зміщується, і статичний блок здається обертається. Оскільки цей дрейф з часом інтегрується, навіть невелике зміщення може перерости в значну похибку положення або курсу в БПЛА, AGV, роботах та стабілізованих платформах. Ефективним рішенням є систематичне: зменшити температурний дрейф ІМУ за допомогою апаратного проектування, охарактеризувати його залежно від температури під час калібрування та компенсувати його онлайн у режимі реального часу.
Температурний дрейф інерціального модуля (IMU) є основною причиною зниження точності в інерціальних системах. Завдяки оптимізації апаратного забезпечення, повнодіапазонному тепловому калібруванню та онлайн-компенсації інженери можуть значно зменшити дрейф та забезпечити стабільні характеристики орієнтації.
Температурний дрейф IMU виникає через фізичну поведінку як пристроїв MEMS, так і пристроїв FOG. Зі зміною температури зміщення датчика зміщується, і якщо його не виправити, цей дрейф накопичується в довгострокові помилки орієнтації. Керування температурним дрейфом IMU вимагає розуміння того, як температура впливає на датчик, характеристики його дрейфу за допомогою калібрування та застосування компенсації в реальному часі. За підтримки належного проектування апаратного забезпечення, фільтрації та об'єднання датчиків цей дрейф стає передбачуваним і повністю керованим.
Зміст
Розуміння температурного дрейфу гіроскопа
Перш ніж досліджувати, як зменшити температурний дрейф IMU, важливо зрозуміти, що це явище являє собою. Температурний дрейф — це не випадковий шум, а систематична зміна зміщення, коли змінюється внутрішня температура датчика. Оскільки це зміщення інтегроване в оцінку положення, температурний дрейф IMU може накопичуватися у великі помилки курсу або орієнтації під час тривалої роботи.
Вихідний сигнал гіроскопа:
Виміряна кутова швидкість = справжня швидкість + зміщення + шум
Температурний дрейф IMU стосується зміни члена зміщення зі зміною температури , і цей механізм відрізняється для гіроскопів MEMS та FOG.
Mems gyrosces
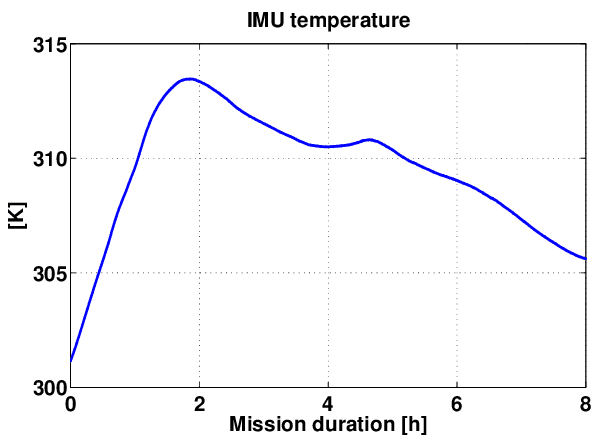
Температурний дрейф інерційного модуля (ІМУ) на основі MEMS виникає через зміни модуля пружності, зміщення резонансної частоти, коливання демпфування, дрейф коефіцієнта посилення ASIC та напруження корпусу. Ці ефекти часто спричиняють значний дрейф прогріву або зміщення під час швидких температурних переходів.
Гіроскопи FOG
Пристрої FOG демонструють менший температурний дрейф IMU, але все ще залежать від варіацій оптичної фази, зсувів довжини хвилі в джерелі світла, розширення волоконної котушки та термічного напруження. Їхній дрейф є плавнішим, але його все ще необхідно моделювати та компенсувати.
Чому дрифт стає серйозною помилкою ставлення
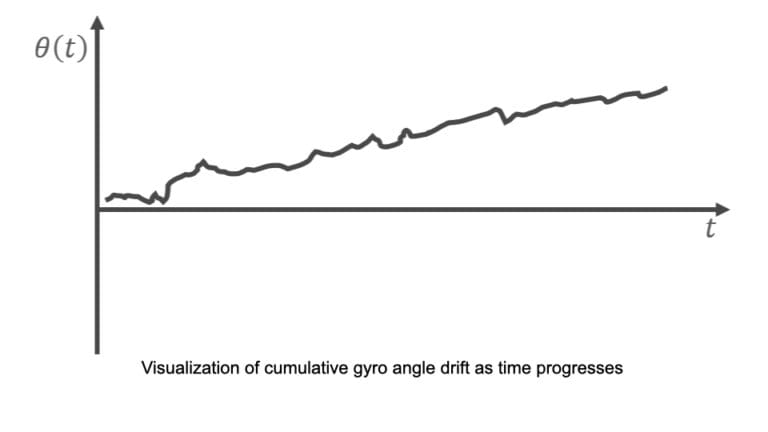
Навіть якщо температурний дрейф може здаватися незначним у момент його виникнення, його вплив стає серйозним, як тільки він потрапляє в процес оцінки положення. Гіроскопи вимірюють кутову швидкість, а положення визначається шляхом інтегрування цієї швидкості з часом. Будь-яке нескориговане зміщення, яким би малим воно не було, продовжує накопичуватися, призводячи до зростання помилок у крені, тангажі та особливо курсі під час тривалої роботи.
Зміщення гіроскопа інтегрується з часом:
Похибка положення ≈ ∫ зміщення × час
Ось чому, здавалося б, незначне відхилення, таке як 0,01 °/с, може призвести до похибки орієнтації на кілька градусів протягом кількох хвилин. Чим довша місія і чим менше доступних зовнішніх орієнтирів, тим більший температурний дрейф впливає на загальну точність навігації.
Три основні інженерні методи зменшення температурного дрейфу
Зменшення температурного дрейфу гіроскопа вимагає багаторівневого інженерного підходу, який вирішує проблему в її витоку, моделює її в контрольованих умовах та постійно виправляє під час роботи. Інженери зазвичай застосовують три взаємодоповнюючі методи : оптимізацію обладнання, автономне теплове калібрування та онлайн-компенсацію в реальному часі.
(1) Оптимізація обладнання: зменшення дрейфу в джерелі
Покращення на рівні апаратного забезпечення значно впливають на власну стабільність гіроскопа. Ефективні стратегії включають вибір датчиків з низьким температурним коефіцієнтом, використання термостабільних конструкційних матеріалів, підтримку симетричного розташування елементів та управління внутрішнім тепловим потоком. Високоякісні інерційні блоки (IMU) також можуть інтегрувати нагрівач або модуль терморегуляції для підтримки стабільної робочої температури датчика, мінімізуючи внутрішній дрейф.
(2) Автономне калібрування температури: побудова моделі зміщення температури
Під час виробництва IMU поміщають у температурну камеру та витримують перехід у всьому робочому діапазоні (наприклад, від -40°C до +85°C). Значення зміщення записуються в кожній температурній точці, а потім підганяються до моделі компенсації — лінійної, поліноміальної або кусково-поштучної. Коефіцієнти моделі зберігаються в мікропрограмі та формують основу для точної корекції в режимі реального часу.
(3) Онлайн-компенсація: корекція дрейфу в режимі реального часу
Завдяки встановленій моделі зміщення від температури, IMU компенсує дрейф під час роботи. Датчик температури поблизу ядра гіроскопа забезпечує показники температури в режимі реального часу, прошивка обчислює очікуване зміщення, використовуючи модель, і це зміщення віднімається від вихідних вимірювань. Це протидіє дрейфу, спричиненому прогріванням, внутрішнім нагріванням та змінами температури навколишнього середовища.

Поза межами компенсації: фільтри та об'єднання датчиків для довгострокової стабільності
Навіть за умови надійного апаратного забезпечення, точного калібрування та компенсації в реальному часі, невеликий залишковий дрейф завжди залишатиметься. Протягом тривалих періодів роботи ці залишкові похибки можуть накопичуватися, тому високопродуктивні системи додають фільтрацію та об'єднання датчиків для забезпечення стабільності.
Методи фільтрації
Низькочастотні або адаптивні фільтри стабілізують оцінку зміщення та приглушують шумні перехідні зміни температури. Статичні методи виявлення дозволяють системі оновлювати оцінки зміщення щоразу, коли IMU нерухомий, що ще більше покращує довгострокову стабільність.
Злиття датчика
Алгоритми злиття вводять зовнішні опорні точки для придушення накопиченого дрейфу. Типові допоміжні джерела включають акселерометри для корекції тангажу/крену на основі сили тяжіння, магнітометри або GNSS для стабілізації курсу, а також одометрію, зір або LiDAR для тривалої навігації. Злиття на основі EKF/UKF прив'язує систему до абсолютних опорних точок, запобігаючи домінуванню температурного дрейфу в продуктивності.

Вибір правильного IMU: MEMS проти FOG
Вибір правильного інерційного модуля (ІМУ) на ранній стадії є одним із найефективніших способів уникнути обмежень, пов'язаних з температурним дрейфом, у майбутньому. ІМУ MEMS ідеально підходять, коли пріоритетами є малий розмір, низьке енергоспоживання та економічна ефективність, а також коли доступна зовнішня допомога. Вони добре працюють для коротких та середніх місій за помірних умов навколишнього середовища.
ІМУ типу FOG є кращим вибором, коли очікується довгострокова стабільність, висока точність курсу або значні коливання температури. Вони переважні для місій, які не можуть покладатися на GNSS або інші зовнішні корекції.
Просте керівництво:
- Якщо ваша система може покладатися на термоядерний синтез і потребує низького SWaP → оберіть MEMS.
- Якщо ваша система не переносить накопичений дрейф → виберіть FOG.

Побудова стабільної системи за допомогою правильного GuideNav IMU
Температурний дрейф інерційного модуля (ІМУ) стає керованим, якщо його вирішити за допомогою належної інженерії: оптимізації апаратного забезпечення, калібрування температури, компенсації в реальному часі, фільтрації та об'єднання датчиків. Завдяки цим заходам БПЛА, AGV, роботи та оборонні системи можуть підтримувати стабільну роботу навіть за складних теплових умов.
GuideNav пропонує інерційні модулі (ІМУ) з високою термостабільністю, ретельно розробленими робочими процесами калібрування та надійними алгоритмами компенсації. Вибір ІМУ GuideNav, який відповідає вашому робочому середовищу та потребам у точності, гарантує, що ваша система спочатку матиме міцну теплову основу, мінімізуючи температурний дрейф ІМУ та підвищуючи довгострокову надійність.
