У своїй роботі, що розвивається навігаційними системами, я виявив, що справжня надійність виходить від незалежності - не від опори на зовнішні сигнали. Ось чому інерційні навігаційні системи (INS) відіграють таку вирішальну роль: вони повністю працюють на внутрішніх вимірах, забезпечуючи послідовну та безперервну навігацію по широкому спектру середовищ, від автономних транспортних засобів до аерокосмічних платформ.
Інерційна навігаційна система (INS) визначає положення, швидкість та орієнтацію, використовуючи лише внутрішні датчики руху, що дозволяє точну навігацію через широкий спектр застосувань-включаючи автономні системи, підводні платформи та критичні для місії оборонні операції.
Перш ніж вибрати INS для вашої програми, це допомагає створити чітке розуміння його принципів роботи та типів системи.
Зміст

Що таке інерційна навігаційна система (INS)?
Інерційна навігаційна система (INS)-це автономна система, яка використовує внутрішні датчики руху-типово акселерометри та гіроскопи-для постійного обчислення положення, швидкості та орієнтації платформи в тривимірному просторі. Оскільки він не покладається на будь-які зовнішні посилання, INS особливо цінні в середовищах, де потрібна послідовна, безперебійна навігація, включаючи підводні, підземні та високодинамічні захисні програми.
Які основні компоненти INS?
На мій досвід проектування рішень Ins, кожна система починається з трьох основних компонентів: гіроскопи, акселерометри та навігаційний процесор. Для підвищення точності та стабільності ми часто інтегруємо додаткові датчики - як приймачі GNSS, магнітометри або барометричні висотоці - для вдосконаленого синтезу датчика. Ця архітектура дозволяє INS підтримувати надійне відстеження руху в різних та складних умовах.

Гіроскопи
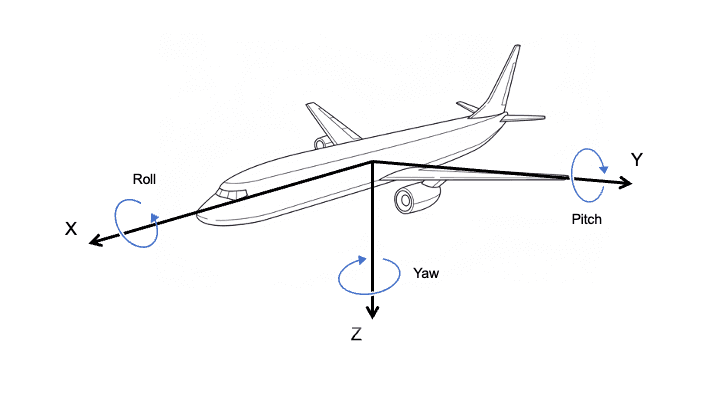
Гіроскопи вимірюють кутову швидкість вздовж трьох ортогональних осей (x, y, z), що забезпечують необхідні дані для обчислювальної орієнтації - пориви, крок та позіхання. Гіроскопи MEMS широко використовуються для компактних застосувань, тоді як туман (волоконно-оптичні гіроскопи) та RLG (кільцеві лазерні гіроскопи) пропонують більш високу точність та довгострокову стабільність для тактичних та аерокосмічних систем.
Акселерометри
Акселерометри вимірюють лінійне прискорення вздовж кожної осі. При інтегрованому з часом ці значення дають зміни швидкості та переміщення. Високопродуктивні акселерометри з нестабільністю низької зміщення та низьким рівнем шуму мають вирішальне значення для підтримки точності положення з часом.
Інерційна навігаційна процесор
Процесор служить обчислювальним ядром INS. Він зливає вхід із датчиків руху, застосовує алгоритми компенсації та фільтрацію, а також виводить положення, швидкість та орієнтацію в режимі реального часу. Багато систем також підтримують інтеграцію зовнішньої датчика та діагностику в режимі реального часу в цьому підрозділі.
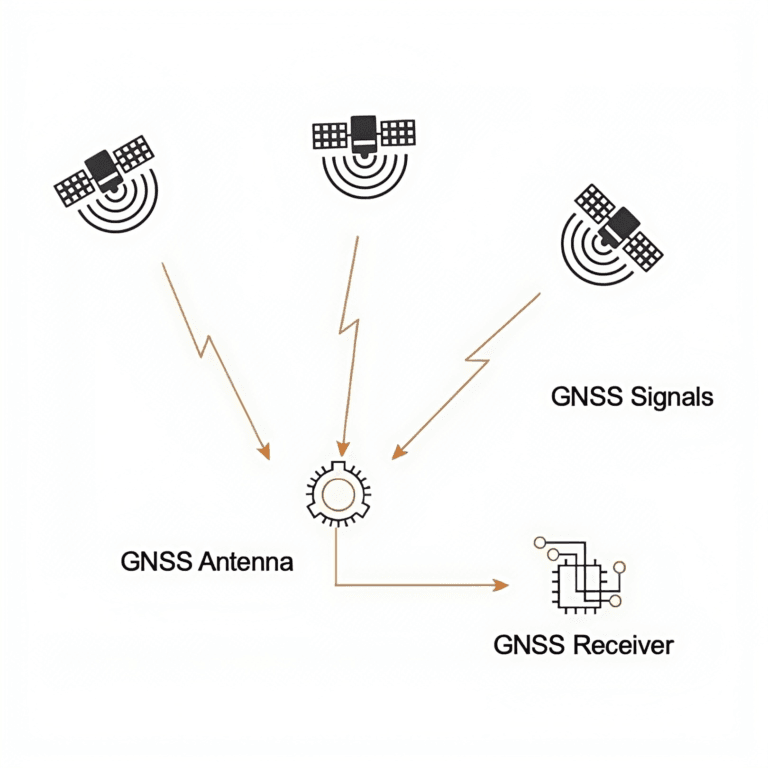
Приймачі GNSS
Зростаюча кількість рішень INS зараз інтегрує приймачі GNSS для підвищення довгострокової точності та глобального позиціонування. Поєднуючи інерційні вимірювання із супутниковими даними-типово через розширену фільтрацію Калмана-ці гібридні системи ефективно виправляють дрейф та забезпечують надійні навігаційні показники на автономних платформах, аерокосмічних системах та геодезних програмах.
Магнітометри
Магнітометри допомагають визначити заголовок шляхом вимірювання магнітного поля Землі. Незважаючи на те, що менш точні, ніж гіроскопічні розчини, вони забезпечують корисну абсолютну орієнтир, особливо в низькодинамічних або внутрішніх додатках.
Барометричні висотоці
Ці датчики забезпечують оцінку висоти на основі атмосферного тиску. Вони зазвичай використовуються в системах БПЛА, літальних апаратів та наземних систем, які потребують вертикальних довідкових даних у середовищах, де висота GNSS може бути ненадійною.
Разом ці компоненти утворюють універсальну навігаційну систему, здатну забезпечити високошвидкісні дані про рух у режимі реального часу-будь то чистий інерційний блок, або як частину щільно інтегрованого рішення GNSS/INS, призначеного для складних, динамічних середовищ.
Які різні типи IN: MEMS, FOG та RLG?
Інерційні навігаційні системи можна широко класифікувати на основі типу гіроскопа, яку вони використовують. Вибір технології визначає ключові характеристики продуктивності, такі як стабільність зміщення, шум, дрейф та вартість - створюючи важливе значення для вибору правильного типу для вашої програми.
1. MEMS INS (мікроелектромеханічні системи)
MEMS INS побудований за допомогою мікромеханічних гіроскопів та акселерометрів на основі кремнію. Завдяки досягненню виготовлення напівпровідників, ці системи зараз широко використовуються на компактних платформах, де розмір, вага, потужність та вартість (Swap-C) є основними обмеженнями.



2. FOG INS (волоконно-оптичні гироскопи IN)
FOG ANS покладається на ефект Сагнака, використовуючи згорнуту волоконну оптику для вимірювання обертання. Він пропонує значно більшу стабільність, менший дрейф та кращу лінійність фактора масштабу, ніж системи MEMS, що робить його ідеальним для навігації тактичного класу.


3. RLG INS (кільцеві лазерні гіроскопи IN)
RLG INS використовує лазерну інтерференцію в порожнині закритого циклу для виявлення кутової швидкості з надзвичайно високою точністю. Ця архітектура забезпечує точність стратегічного класу і, як правило, розгортається в системах, де абсолютна інерційна ефективність є критичною.
| Тип INS | Переваги | Обмеження | Типові випадки використання |
|---|---|---|---|
| MEMS INS |
|
| БПЛА, робототехніка, носячі системи, боєприпаси |
| FOG INS |
|
| Аерокосмічні платформи, оборонні транспортні засоби, морські системи |
| Rlg ins |
|
| Балістичні ракети, космічний корабель, літак високого класу |
Як працює INS?
Під час налаштування INS я завжди починаю з визначення його початкового положення, швидкості та орієнтації. Звідти система покладається виключно на інерційні вимірювання, щоб оцінити кожен наступний стан руху в режимі реального часу.
1. Вимірювання прискорення
Система використовує триосові акселерометри для вимірювання лінійного прискорення у трьох напрямках. Ці значення інтегруються з часом для обчислення швидкості, а потім знову інтегруються для обчислення змін положення.
2. Вимірювання кутової швидкості
Гіроскопи вимірюють кутову швидкість вздовж ося x, y та z. Ці показання використовуються для оновлення орієнтації системи за допомогою інтеграції кута Quaternion або Ейлера.
3. Принцип мертвого розрахунку
INS діє через мертве розрахунку, тобто він оцінює поточний стан на основі попереднього введення та датчика. Це дозволяє йому орієнтуватися без зовнішніх посилань, таких як GNSS.
4. Накопичення та дрейф помилок
Оскільки він інтегрує галасливі дані датчика, невеликі упередження та помилки (наприклад, нестабільність зміщення, помилка фактора масштабу) накопичуються з часом, що призводить до дрейфу як у положенні, так і в орієнтації.
5. синтез датчика та надання допомоги входам
Щоб мінімізувати дрейф, INS часто поєднується із зовнішніми датчиками, такими як GNSS, журнали швидкості доплерівської (DVL), барометри або магнітометри. Ці джерела допомоги правильні накопичені помилки та розширюють оперативну точність.
Ця архітектура дозволяє INS доставляти автономну навігацію в режимі реального часу в середовищах, де зовнішні сигнали обмежені, порушені або повністю недоступні-наприклад, під час високої динаміки або електромагнітних перешкод.
Які показники продуктивності визначають якість INS?
Вибираючи інерційну навігаційну систему, розуміння її основних параметрів продуктивності є важливим для того, щоб вона відповідала вимогам місії. Наступні показники є найбільш критичними:
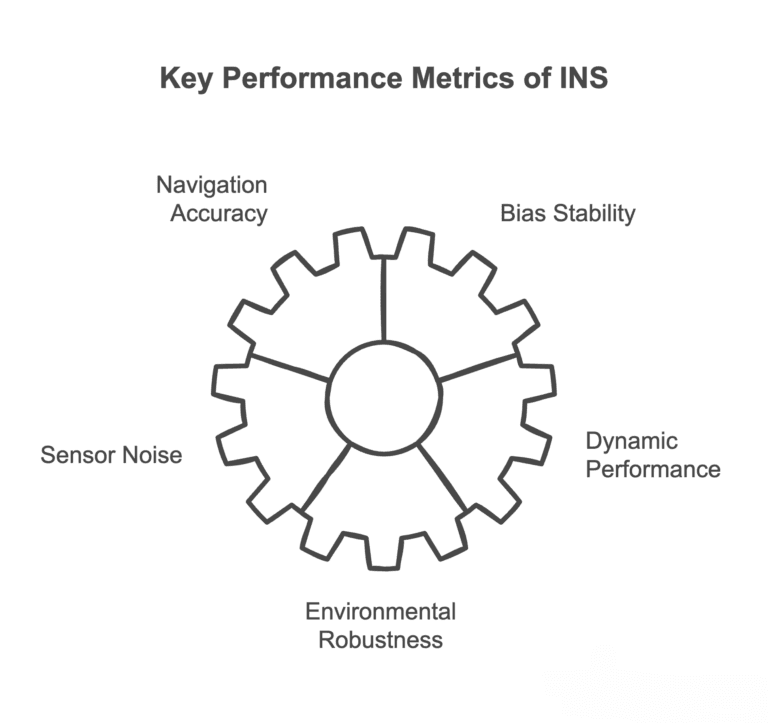
1. Точність навігації
Точність INS включає положення, швидкість та помилки ставлення, які накопичуються з часом. Висока точність має вирішальне значення для операцій у середовищах, що живуть GNSS. Наприклад, Guidenav GFS120A пропонує точність заголовка 0,01 ° (1σ) , точність рулону/кроку 0,005 ° (1σ) та позиціонування рівня RTK <2 см + 1 проміле , з помилкою швидкості, як від 0,02 м/с .
2. Стабільність зміщення
Стабільність зміщення відображає довгостроковий дрейф гіроскопів та акселерометрів, що безпосередньо впливає на витривалість навігації. Guidenav GFS120A має стабільність зміщення гіроскопа 0,003 °/год та стабільність зміщення акселерометра в рамках 20 мкг , що робить його придатним для високоточних та тривалих автономних застосувань.
3. Шум датчика (випадкова прогулянка)
Випадкова прогулянка кількісно оцінює короткочасний шум датчика. Нижні значення ARW та VRW вказують на більш чисті, стабільніші дані під час руху.
4. Динамічна продуктивність
Швидкість оновлення, затримка та пропускна здатність визначають, як швидко реагує на руху. Висока динамічна продуктивність є критичною для БПЛА, робототехніки та ракет.
5. Екологічна надійність
INS повинен витримати вібрацію, удар та температури. Відповідність стандартам MIL-STD або DO-160 забезпечує надійність у суворих умовах.
Розуміння та порівняння цих показників дозволяє інтеграторам вибирати відповідні INS для своєї платформи, збалансування витрат, точності та екологічних потреб.
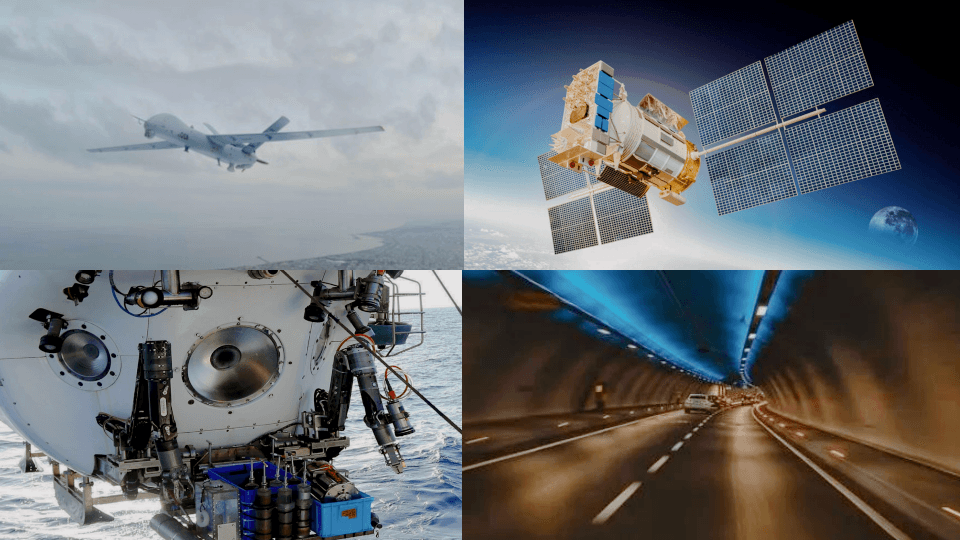
Які типові застосування INS у галузях промисловості?
Інерційні навігаційні системи (INS) широко використовуються в аерокосмічній, морській, обороні, безпілотних системах, промислова автоматизація та підземних галузей, де безперервна, незалежна від сигналу навігація є критичною. В аерокосміці вони дають змогу точні літаки та ракетні настанови; У морських програмах вони підтримують підводні човни та AUV, де GNSS недоступний. Системи оборони покладаються на INS для націлювання, контролю пожежі та навігації в середовищах, що живуть GPS. Безпілотні платформи, такі як БПЛА, УГВ та UUV, використовують INS для позиціонування в режимі реального часу та синтезу датчиків. У промисловій робототехніці INS забезпечує точний контроль руху для AGV та кранів. У видобуванні та тунелі INS дозволяє надійне підземне позиціонування для систем важких машин та буріння.
Як Guidenav веде в інерційній навігаційній галузі?
Маючи 15+ років досвіду, Guidenav забезпечує високоефективні інерційні навігаційні рішення, довірись захистом, аерокосмічній та автономній системній інтеграторах у всьому світі.
Різноманітні лінійки продуктів
Від компактних MEMS INS для БПЛА до високоточного туману для морських та аерокосмічних приміщень, Guidenav охоплює повний спектр профілів місії.
Оптимізований для Swap-C
Всі системи побудовані для розміру, ваги, потужності та економічних витрат - це для мобільних, вбудованих та тактичних платформ.
Гібридна інтеграція готова
Наші платформи INS підтримують безшовне синтез за допомогою GNSS, DVL та інших датчиків, що надають допомогу за допомогою стандартних інтерфейсів (UART, CAN, Ethernet).
Міцний і підведений на місцях
Розроблені для зустрічі MIL-STD-810H, гуденавські одиниці є ударними, стійкими до вібрації та надійно працюють у суворих умовах.
Guidenav є кращим партнером для інтеграторів, які шукають просунуті інерційні навігаційні системи (INS), які поєднують високу точність, експлуатаційну надійність та повне дотримання експорту за вимогливу оборону, аерокосмічну та автономну програму.