З мого досвіду проектування інерціальних систем для польових операцій, інженери часто не помічають одного оманливо простого числа: кутового випадкового блукання. Воно не таке показове, як стабільність зміщення або пропускна здатність, але визначає реальну межу того, як довго ваша система може залишатися надійною, особливо коли GNSS перестає працювати. ARW – це не помилка, яку ви калібруєте. Це шум, який постійно зростає секунду за секундою. Як тільки ви зрозумієте, як це працює, це змінить те, як ви оцінюєте кожен IMU на своєму столі.
ARW — це не специфікація, це годинник. З моменту запуску вашого IMU він показує, як швидко знижується довіра до орієнтації. Чим нижчий він, тим довше ваша система залишається правильною.
Протягом багатьох років я бачив, як команди вибирали IMU на основі характеристик зміщення та діаграм пропускної здатності, лише для того, щоб зіткнутися з дрейфом, який не піддається моделюванню. Цей дрейф часто пов'язаний не з тим, що вони пропустили, а з тим, що вони недостатньо зважили: ARW (променева ширина шуму). Як тільки ви розумієте, що ARW визначає ваш горизонт шуму, ви починаєте по-іншому читати технічні характеристики. Ви перестаєте запитувати: «Яка точність?» і починаєте запитувати: «Як довго я можу покладатися на цю річ, перш ніж невизначеність візьме гору?»
Зміст
Що таке кутове випадкове блукання (ARW)?
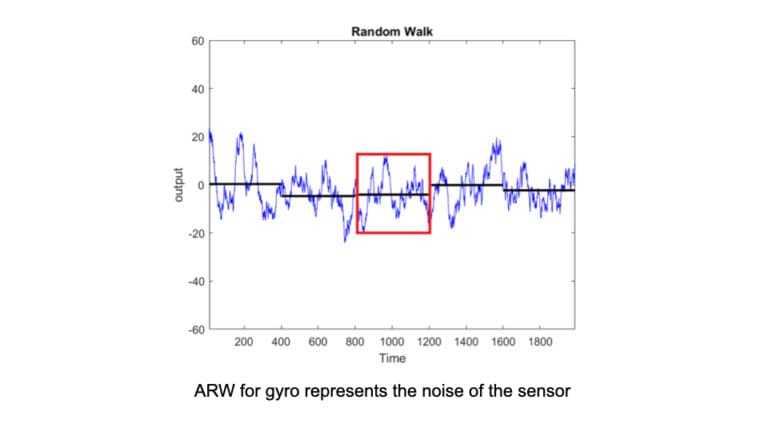
Простіше кажучи, кутове випадкове блукання (ARW) – це шум, який накопичує ваш гіроскоп у момент початку інтегрування кутової швидкості. Але давайте будемо зрозумілими – це не похибка вимірювання чи дрейф зміщення. , що виникає внаслідок білого шуму в сигнальному тракті гіроскопа, пропорційне квадратному кореню з часу Ви не можете його відкалібрувати і не можете чекати, поки він стабілізується – він завжди присутній, цокає у фоновому режимі.
Я часто описую ARW молодшим інженерам як «розмиття базової лінії» вашої оцінки орієнтації . Їй байдуже, рухається ваша платформа чи нерухома. Навіть у лабораторії , з надійно прикріпленим до столу датчиком, ARW має значення. Саме це робить її такою фундаментальною. Це не недолік продуктивності — це фізика.
Як вимірюється ARW на практиці?
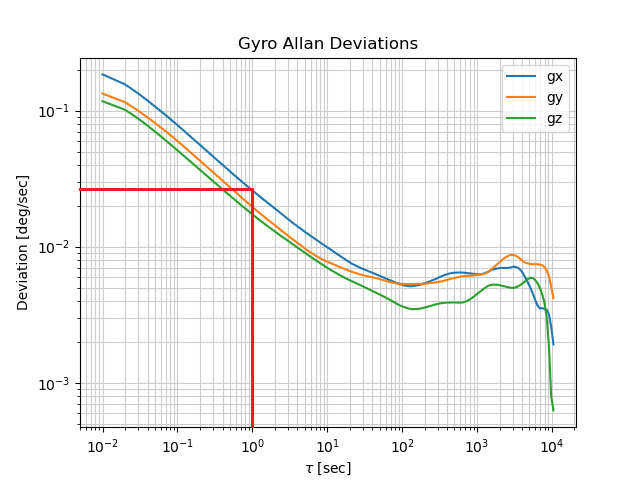
Золотим стандартом для вимірювання ARW є дисперсійний аналіз Аллана.
Ця методика розкладає різні типи шуму протягом різних часових інтервалів. При коротких тривалостях усереднення ARW проявляється як характерний нахил -½ на логарифмічному графіку відхилення Аллана. Це ознака білого шуму на виході вашого гіроскопа, і він встановлює мінімальне значення для точності визначення положення.
Але не можна довіряти лише даним даним.
У своєму робочому процесі я завжди проводжу контрольовані статичні випробування на механічно ізольованій платформі, реєструю необроблені дані гіроскопа та генерую власні графіки Аллана. Чистий короткочасний нахил показує, що гіроскоп стабільний. Якщо нахил має шум або є нерівномірним, я знаю, що те, що рекламується як «0,05°/√h», може не працювати в умовах розгортання.
ARW — це не просто число, це закономірність, яку слід бачити в реальних даних.
Ось чому я ставлюся до ARW як до чогось, що потрібно перевіряти, а не просто цитувати. Якщо ваша дисперсія Аллана не відповідає специфікації, весь ваш ф'южн-стек може постраждати від наслідків пізніше.
Чому ARW є критично важливим для точності IMU?
Шум, який ніколи не спить
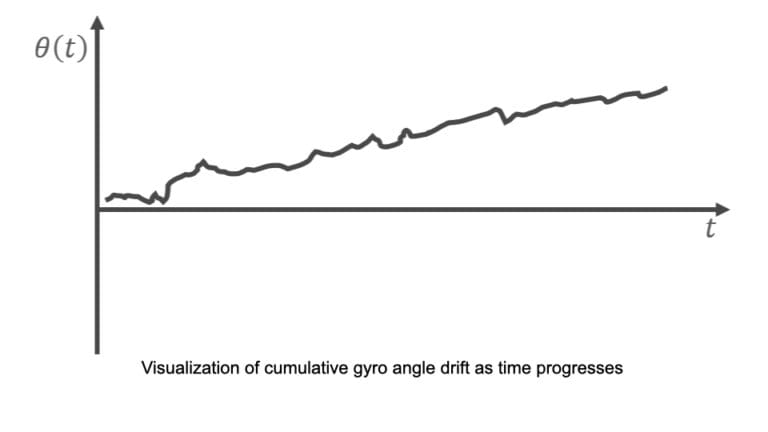
На відміну від детермінованих помилок, таких як зміщення або масштабний коефіцієнт, ARW постійно вносить невизначеність у вашу оцінку орієнтації. Оскільки гіроскопи вимірюють кутову швидкість , а ці швидкості інтегруються з часом , навіть невеликі випадкові коливання складаються у значний кутовий дрейф. Вам не потрібні хвилини чи години, щоб відчути його вплив — на високочутливих платформах ARW починає знижувати точність протягом кількох секунд .
Невидима стеля навігації
ARW встановлює жорстке обмеження на те, як довго ваш IMU може забезпечувати надійну орієнтацію, коли зовнішні корекції (наприклад, GNSS або магнітометри) недоступні. Я бачив, як ідеально налаштовані фільтри Калмана поступово втрачали зчеплення з курсом просто тому, що базовий гіроскоп мав ARW занадто високе для тривалості місії . Це не проблема програмного забезпечення, а фізичне обмеження. У кожній інерціальній системі, яку я розробляв, як тільки я знаю ARW, я можу передбачити, коли навігація вийде з ладу. І це потужно.
Чим відрізняється ARW від нестабільності зміщення?
| Довільне блукання кута (ARW) | Нестабільність зміщення |
|---|---|
| Короткочасний шум. Миттєво проявляється на виході гіроскопа у вигляді невеликих випадкових коливань. | Середньостроковий та довгостроковий дрейф. Повільне блукання рівня нульової ставки з часом. |
| Збільшується з часом √. Спричиняє постійне накопичення похибки орієнтації. | Має плоске плато на графіках дисперсії Аллана — це той «горб», який шукають інженери. |
| Непередбачуваний, але обмежений. Може бути змодельований статистично, але не виключений. | Повільно змінюється. Часто моделюється та частково компенсується фільтрами. |
| Домінує в короткочасній точності. Особливо критично важливо в швидкодіючих, високодинамічних системах. | Домінує в довготривалій точності. Має значення в таких застосуваннях, як інтегральні навігаційні системи геодезичного класу або навігація тривалого часу. |
Чому така плутанина?
Оскільки як ARW, так і нестабільність зміщення викликають дрейф, але по-різному та в різні часові рамки, інженери, які новачки працюють з інерціальними системами, часто змішують їх , вважаючи, що дрейф зміщення є єдиним джерелом навігаційної помилки. З мого досвіду, саме ARW часто обмежує продуктивність у тактичних місіях , особливо там, де час роботи без GNSS вимірюється хвилинами, а не годинами.
Які типові значення ARW для різних IMU?
У реальних проектах я рідко запитую: «Який найкращий IMU ?» — я запитую: «Який найнижчий ARW я можу отримати в рамках такого розміру, ваги та бюджету?» ARW часто є специфікацією, яка непомітно вказує, чи є датчик споживчим, тактичним чи стратегічним.
Ось як я бачив розподіл ARW за класами датчиків:
| Клас ІМУ | Типовий ARW (°/√год) | Де воно належить |
|---|---|---|
| Споживчі МЕМС | 1 – 10 | Телефони, носима електроніка, робототехніка початкового рівня |
| Промислові МЕМС | 0.1 – 1 | Дрони з ГНСС, легкі автономні платформи |
| Тактичні МЕМС | 0.05 – 0.1 | Оборонні БПЛА, стабілізація зброї, транспортні засоби |
| Туманність навігаційного класу | 0.001 – 0.01 | Морські, аерокосмічні, залізничні, безпілотні літальні апарати тривалої дії |
| Стратегічний RLG | < 0.001 | Підводні човни, міжконтинентальні балисти, військові системи високого рівня безпеки |
Я ставлюся до ARW як до відсікаючого фільтра в дизайнерських рішеннях.
Якщо моїй системі потрібно протриматися 30 хвилин без GNSS та підтримувати точність курсу 1°, то MEMS-пристрої з точністю 0,2°/√год просто не підійдуть. Тактичні MEMS можуть ледве впоратися. Якщо мені потрібна продуктивність, що перевищує цю норму, то або туман, або нічого.
Що буде далі?
Наразі ви маєте чітко розуміти, що таке ARW, як його вимірюють і чому він важливий. Але теорія – це лише половина справи. У другій частині цієї серії я розповім про те, як ARW проявляється в реальних системах – від дрейфу БПЛА до виключно інерційних місій – і як інженери, такі як ми, проектують його з урахуванням цього. Ми розглянемо тактичні аспекти: обмеження програмного забезпечення, механічну ізоляцію, стратегії термоядерного синтезу та жорсткі пороги ARW для критично важливих застосувань.
→ Перейти до частини 2: Проектування з урахуванням ARW
