Високоточні MEMS-імпульсні модулі (IMU) часто показують низьку продуктивність після інтеграції. Дрейф, перекіс та фактори навколишнього середовища непомітно знижують точність, аж до появи польових збоїв. Для збереження справжньої точності дотримуйтесь чотирьох правил: жорстке вирівнювання, контрольоване середовище, періодичне калібрування та дисциплінована експлуатація.
Високоточні MEMS-імпульсні модулі (IMU) забезпечують неперевершену продуктивність датчиків руху, але лише за умови правильного використання. Це розкриває чотири критичні помилки використання, які часто призводять до втрати точності, та способи їх запобігання в реальній інтеграції.
Високоточні MEMS-імпульсні блоки (IMU) є основою сучасної навігації — від дронів до автономних транспортних засобів. Однак навіть преміальні датчики не можуть працювати належним чином, якщо з ними неправильно поводитися. Цей посібник викриває приховані пастки, які непомітно порушують точність, і показує, як інтегратори можуть їм запобігти.
Зміст
Встановлення: відправна точка кожного високоточного MEMS IMU
Встановіть жорстко, а не м'яко
MEMS IMU повідомляє лише про свій власний рух, тому він повинен рухатися точно так само, як рухається платформа. Для надійних результатів закріпіть пристрій безпосередньо до жорсткої конструкції за допомогою металевих або вуглецевих кронштейнів. Уникайте гумових прокладок або інших м’яких матеріалів, які згинаються або поглинають вібрацію — вони порушують механічний зв’язок і спотворюють дані датчика.
Якщо віброізоляції уникнути неможливо, ретельно спроектуйте її та перевірте, чи характеристики демпфування не спотворюють вихідну частоту або фазову характеристику IMU.
Ідеально вирівняйте осі
Навіть невелике кутове зміщення може призвести до значних похибок позиціонування. Коли високоточний MEMS IMU зміщений лише на один градус, результуючий дрейф може сягати кілометрів після тривалої роботи. Завжди вирівнюйте осі IMU з системою відліку транспортного засобу або застосовуйте точне калібрування вирівнювання після встановлення.
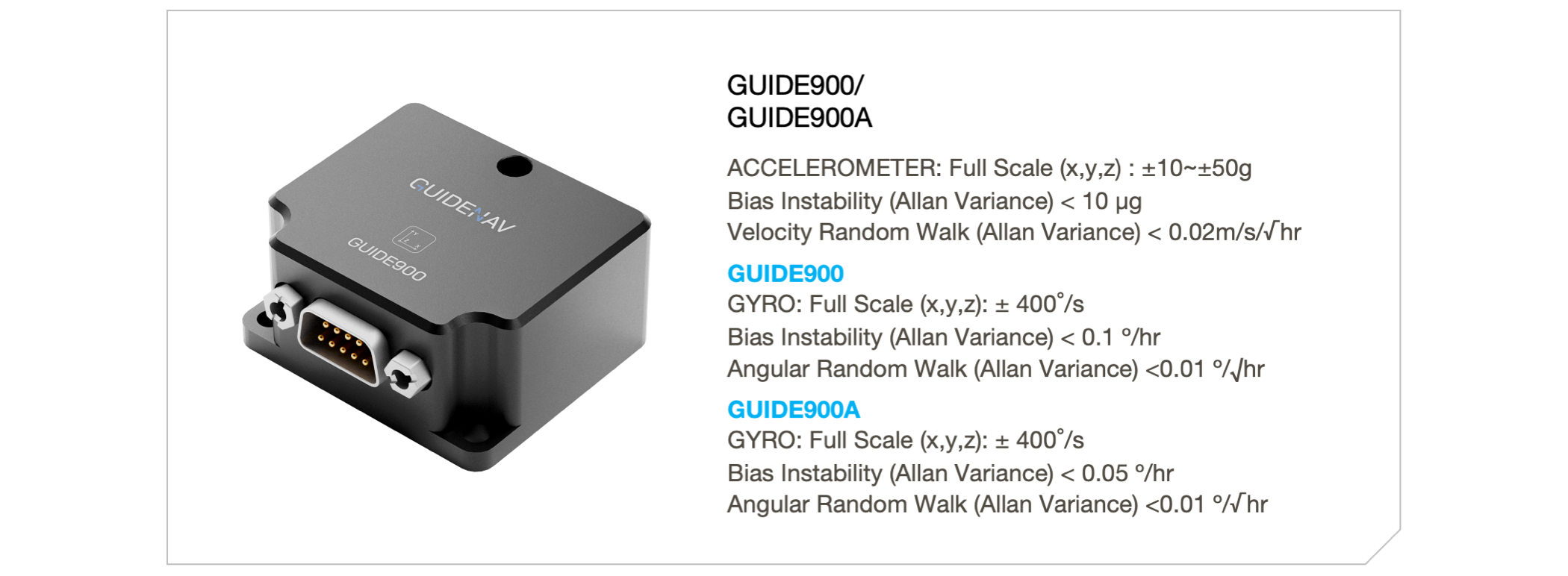
GuideNav MEMS IMU GUIDE900 калібрується на заводі з нелінійністю масштабного коефіцієнта менше 100 ppm та міжосьовим зв'язком менше 200 ppm, проте погане вирівнювання установки може швидко звести нанівець цю точність.
Уникайте зон вібрації та напруження
Постійна вібрація або структурне напруження поступово змінюють внутрішні характеристики MEMS IMU. Уникайте встановлення датчика поблизу двигунів, коробок передач або зварних з'єднань. З часом ці механічні впливи можуть призвести до дрейфу зміщення та зниження довготривалої стабільності.
Контроль навколишнього середовища: прихований ворог точності IMU
Стабільність температури – це все
Температура є найпоширенішою причиною дрейфу у високоточних MEMS IMU. Кожен датчик має визначений тепловий робочий діапазон — зазвичай від -40 °C до +85 °C. Різкі коливання можуть змістити нульове зміщення або масштабний коефіцієнт.
За потреби тримайте MEMS IMU у стабільному середовищі, використовуючи ізоляцію, контрольований потік повітря або нагрівальні елементи. Усі MEMS IMU GuideNav повністю температурно компенсовані в усьому діапазоні, що забезпечує стабільну точність в екстремальних умовах.
Вологість може непомітно пошкодити точність
Волога – ще одна невидима загроза. Коли вологість перевищує 85 % відносної вологості, вона може проникнути в корпус, спричинити корозію схем та змінити поведінку датчика. Навіть короткочасна конденсація може спричинити тимчасові стрибки зміщення. Завжди захищайте високоточний інерційний модуль (ІМУ) в герметичному корпусі за допомогою осушувачів під час роботи в морському або тропічному кліматі.
Уникайте електромагнітних перешкод (EMI)
Високострумові лінії та імпульсні перетворювачі живлення можуть створювати шум на аналоговому вході MEMS IMU. Щоб запобігти перешкодам, відокремте проводку живлення від сигнальних ліній, забезпечте належне заземлення та використовуйте екрановані кабелі. Чисте електромагнітне середовище так само важливе, як і механічна стабільність, для підтримки довгострокової точності.
Калібрування: рятівний круг високоточних MEMS IMU
Заводське калібрування не триває вічно
Кожен MEMS IMU виходить із заводу відкаліброваним за зміщенням, масштабним коефіцієнтом та ортогональністю, але ці параметри з часом змінюються через температурні цикли, вібрацію та механічні навантаження. Щоб високоточний IMU працював відповідно до специфікацій, плануйте періодичне калібрування кожні 6–12 місяців або раніше для критично важливих систем.
Виберіть правильний підхід до калібрування
Якщо видалення IMU недоцільне, виконайте калібрування на борту або в режимі реального часу за допомогою процедур статичного вирівнювання або оцінки за допомогою GNSS.
Однак, для повного відновлення точності потрібне лабораторне калібрування на таблиці швидкостей або в термокамері. Цей метод коригує всі шість осей та компенсує температурний дрейф, забезпечуючи підтримку тактичної продуктивності MEMS IMU в різних середовищах.
Завжди перевіряйте результат
Калібрування не вважається завершеним, доки його не буде перевірено. Порівняйте дані після калібрування з профілями опорних рухів або наземними датчиками, щоб підтвердити стабільність і точність.
Нехтування перевіркою може залишити приховані помилки, які непомітно знижують продуктивність, зводячи нанівець мету повторного калібрування.
Експлуатація та керування: Точність криється в деталях
Розігрійтеся, перш ніж довіряти даним
Після ввімкнення MEMS-імпульсному модулю (IMU) потрібен час для досягнення теплової та електронної стабільності. Більшість високоточних IMU потребують періоду прогріву від 1 до 30 хвилин, залежно від моделі та середовища. Занадто ранній збір даних може призвести до тимчасового зміщення, яке в кілька разів перевищує номінальне значення.
Уникайте частого вмикання/вимкнення живлення
Багаторазове ввімкнення та вимкнення IMU скидає його внутрішні фільтри та призводить до тимчасових змін зміщення. Забезпечте безперервне живлення MEMS IMU під час збору критично важливих даних, щоб забезпечити стабільну продуктивність та безперебійність передачі даних.
Поводьтеся обережно — завжди
Незважаючи на свою міцну конструкцію, високоточні MEMS-імпульсні модулі (IMU) містять делікатні мікроструктури. Падіння, удари або неправильне поводження можуть призвести до незначного, але постійного погіршення точності. Під час транспортування використовуйте м'які контейнери та надійно закріплені роз'єми. Регулярно перевіряйте кабелі, кріплення та корпуси — механічне навантаження або нещільне кріплення проводки часто передують дрейфу датчика.

Експертний огляд GuideNav
У GuideNav ми бачили, як простий недогляд — погане кріплення, пропущене калібрування або тепловий дрейф — можуть перетворити високоточний MEMS IMU на ненадійний датчик. Інтеграція в реальному світі ніколи не обмежується лише специфікаціями; вона стосується дисципліни в установці, калібруванні та довгостроковому обслуговуванні.
Саме тому інерційні модулі GuideNav MEMS розроблені для професійних інтеграторів, яким потрібна стабільна, перевірена в польових умовах точність. Кожен блок повністю температурно компенсований, ортогонально калібрований та захищений міцним алюмінієвим корпусом, розробленим для того, щоб витримувати найжорсткіші вібрації та умови навколишнього середовища.
Незалежно від того, чи ваш проект включає безпілотні літальні апарати, автономні транспортні засоби чи промислову робототехніку, застосування правильних практик дозволить вашому MEMS IMU працювати саме так, як було задумано — стабільно, надійно та готово до критично важливих робіт.
