Інерціальні датчики за своєю природою недосконалі. Дрейф зміщення, випадкове блукання та теплова чутливість не є аномаліями, а очікуваною поведінкою. Важливо не усунення цих помилок, а їх управління.
З роками я зрозумів, що надійна інерціальна навігація залежить не лише від характеристик датчиків, а й від того, наскільки добре ви розумієте та компенсуєте ці недоліки. Незалежно від того, чи використовуєте ви MEMS, чи FOG, успіх залежить від того, що відбувається після того, як датчик починає повідомляти дані.
інерціальної навігації зрештою обмежується тим, наскільки добре змодельовані та компенсовані помилки датчиків. Від дрейфу зміщення до випадкового блукання , ефективне зменшення помилок вимагає поєднання проектування апаратного забезпечення, процедур калібрування та алгоритмічної корекції в режимі реального часу.
Інерціальна навігація не обмежується виключно апаратним забезпеченням. Продуктивність апаратного забезпечення встановлює мінімальний рівень, але максимальний визначається тим, наскільки ефективно управляються помилки.
Зміст
Чому компенсація помилок є справжнім вузьким місцем в INS?
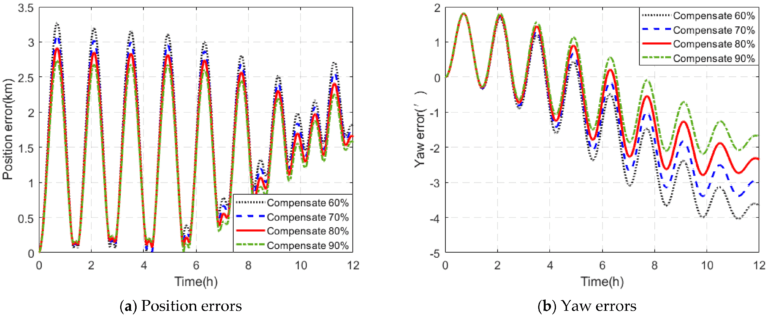
Інерціальні навігаційні системи зазвичай не виходять з ладу раптово — вони деградують непомітно . Те, що починається як крихітне зміщення гіроскопа або невелике зміщення акселерометра, поступово перетворюється на зростаючу похибку в орієнтації, швидкості та положенні . Я бачив, як ІНС дрейфував від субметрової точності до непридатності для використання протягом кількох хвилин — не тому, що датчики були несправні, а тому, що помилку не враховували .
Незалежно від того, наскільки точним є ваш IMU на папері, некомпенсований INS завжди дрейфуватиме . А в середовищах, де відсутня GNSS , цей дрейф стає критично важливим. Ефективна компенсація — це не бонусна функція, а основа надійного INS .
Класифікація помилок INS: що можна моделювати, а що ні
Під час роботи з інерціальними навігаційними системами я в першу чергу звертаю увагу на те, як похибки поводяться з часом. Деякі з них передбачувані, інші – ні. І ця різниця має велике значення, коли йдеться про компенсацію.
Систематичні помилки: передбачувані та виправні
Якщо їх не виправити, вони повторюються з плином часу та за будь-якої температури:
- Дрейф зміщення в гіроскопах та акселерометрах
- Нелінійність масштабного коефіцієнта
- Незначні зміщення між осями датчиків
- Термочутливість, яка змінює вихідний сигнал залежно від навколишнього середовища
За допомогою надійної процедури калібрування ці похибки зазвичай можна виміряти один раз і послідовно компенсувати — за умови, що ваші умови залишаються в межах допустимих значень.
Випадкові помилки: непередбачувані, але такі, що піддаються опису
Також є помилки, які неможливо виправити, їх можна лише змоделювати. До них належать:
- Кутове випадкове блукання (ARW)
- Випадкове блукання швидкістю (VRW)
- Білий шум датчика
- Артефакти, викликані вібрацією, особливо на мобільних платформах
Висновок: Систематичні помилки вирішуються в лабораторії. Випадкові помилки усуваються в польових умовах.
Як помилки INS поширюються з часом?
Перш ніж говорити про компенсацію, важливо зрозуміти, як насправді поводяться помилки всередині INS. Вони не просто з'являються — вони зростають, накопичуються та взаємодіють з динамікою системи способами, які часто недооцінюють. Давайте розглянемо, як це відбувається.
Дрібні помилки не залишаються малими.
В інерціальній навігаційній системі навіть незначне зміщення гіроскопа або похибка прискорення в мікрогра зростатимуть з часом. Це пояснюється тим, що INS працює шляхом інтеграції даних датчиків, тобто будь-яка похибка накопичується на кожному кроці.
Інтеграція — це множник.
Зсув орієнтації впливає на швидкість. Похибка швидкості потім впливає на положення. Ця ланцюгова реакція пояснює, чому система з, здавалося б, хорошими характеристиками на папері все ще може дрейфувати на сотні метрів після 30 хвилин відмови від GNSS.
Профіль руху має велике значення.
Те, як рухається ваша система, впливатиме на те, які помилки домінуватимуть. На статичних платформах переважають довготривале зміщення та тепловий дрейф. У високодинамічних системах, таких як дрони, ракети або швидкісні марсоходи, нелінійність масштабного коефіцієнта та часова затримка стають більш критичними, ніж саме зміщення.
Довгі місії все підсилюють.
Чи то 12-годинний маршрут дослідження, чи 2-хвилинний політ ракети, чим довше ваша INS працює без корекції, тим важливішим стає моделювання помилок.
Моделювання помилок датчиків для ефективної компенсації
Перш ніж ви зможете виправити щось в INS, вам потрібно зрозуміти, що ви виправляєте. Зміщення, дрейф та шум датчика – це не помилки, а поведінка. І якщо ви не змоделюєте їх належним чином, ваша стратегія компенсації – це просто здогадки.
Зазвичай я покладаюся на чотири ключові методи моделювання. Кожен з них спрямований на різні типи помилок, і разом вони дають чітке уявлення про те, як поводитиметься ваша система — не лише в лабораторії, а й у польових умовах.
| Метод моделювання | Основне призначення | Типи помилок, що розглядаються | Чому це важливо |
|---|---|---|---|
| Аллан Варіанс | Проаналізуйте, як шум датчика змінюється з часом | ARW, нестабільність зміщення, випадковий дрейф | Необхідний для налаштування фільтрів та градації датчиків |
| Калібрування шести позицій | Оцінити фіксовані зміщення та неузгодженість | Зміщення, коефіцієнт масштабування, зміщення осей | Забезпечує точне видалення статичних помилок |
| Термічне калібрування | Карта зміни виходу залежно від температури | Температурний дрейф зміщення та коефіцієнта посилення | Критично важливо для реальних зовнішніх та мобільних платформ |
| Аналіз PSD | Розуміння шуму датчика за частотою | Білий шум, низькочастотне блукання | Інформує про дизайн фільтра, не пригнічуючи реальний рух |
Порада: Перш ніж довіряти своєму INS у будь-якій місії, де відмовлено у використанні GNSS, або у довготривалій місії, поєднайте щонайменше три з цих методів.
Методи зменшення помилок на основі апаратного забезпечення
Гарне програмне забезпечення не може врятувати погане обладнання. В інерціальних навігаційних системах механічні, теплові та електричні конструктивні рішення безпосередньо впливають на довгострокову стабільність . Це основні методи, на які я покладаюся для створення надійних платформ INS.
- Віброізоляція є важливою.
Нефільтрована механічна вібрація створює хибні сигнали руху. Використання налаштованих ізоляторів або належним чином демпфованих кріплень датчиків може значно зменшити високочастотний шум, особливо на гусеничних транспортних засобах або гвинтокрилах.
- Термічна стабільність забезпечує дійсність калібрування.
Вихідний сигнал датчика дрейфує залежно від температури. Пасивна ізоляція або активний нагрів можуть допомогти підтримувати робочу температуру в межах каліброваного діапазону.
- Шум живлення перетворюється на шум сигналу.
Пульсації напруги та електромагнітні перешкоди спричиняють ледь помітне, постійне спотворення аналогових та цифрових сигналів. Я завжди використовую чисті лінії живлення, малошумні регулятори та суворе аналогове/цифрове розділення.
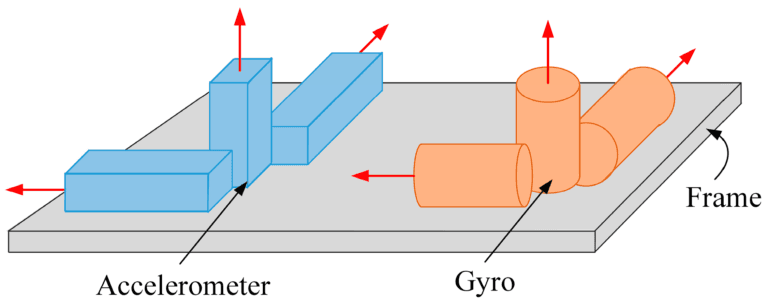
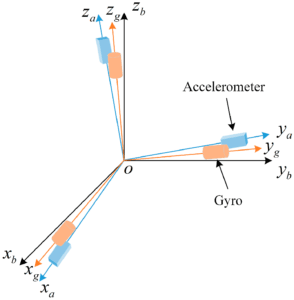
- Точність монтажу впливає на вирівнювання.
Навіть незначні механічні зміщення можуть призвести до значних помилок у положенні та швидкості. Використовуйте жорсткі, оброблені кронштейни та ретельно контролюйте орієнтацію та крутний момент інерційного модуля (ІМУ).
- Використовуйте датчики, що відповідають місії.
Не вибирайте просто «найкращий» датчик — оберіть той, який відповідає вашому бюджету похибки. Для тривалих перебоїв у роботі ГНСС стабільність зміщення має найбільше значення. Для швидких платформ пріоритет мають низька ARW та пропускна здатність.
Підсумок: найкраща інерційна продуктивність починається задовго до збору даних — вона починається з того, як ви прикріплюєте датчик до рами.
Програмні методи компенсації
Як тільки апаратне забезпечення стабільне, програмне забезпечення бере на себе ініціативу. Саме тут відбувається більша частина контролю дрейфу , а також тут хороша модель може змусити скромний датчик працювати як чудовий. Ось як я підходжу до цього на практиці:
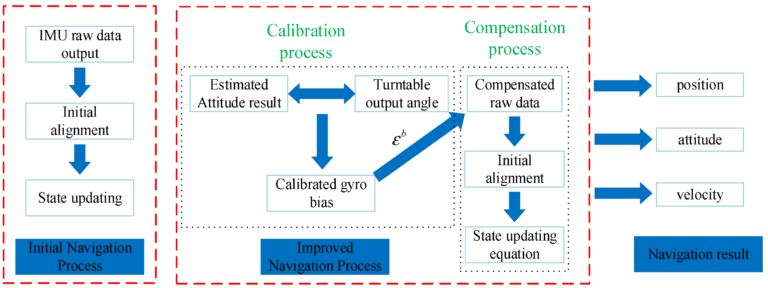
- Почніть з правильного калібрування.
Використовуйте статичні та динамічні процедури для вимірювання зміщення, масштабного коефіцієнта, перекосу та температурної реакції. Без гарної базової лінії калібрування все інше – це здогадки.
- Використовуйте фільтри, що відповідають вашій динаміці.
Розширені фільтри Калмана (EKF), неароматизовані фільтри Калмана (UKF) або додаткові фільтри — вибирайте на основі вашого профілю руху та доступних допоміжних джерел. Неправильна структура фільтра гірша, ніж його відсутність взагалі.
- Температурна компенсація не підлягає обговоренню.
Незалежно від того, чи використовуєте ви FOG, чи MEMS IMU, поведінка датчика змінюється залежно від температури. Корекція в режимі реального часу за допомогою внутрішніх або зовнішніх датчиків температури може зменшити дрейф на порядок.
- Адаптивна фільтрація покращує виживаність.
У багатофазних місіях (наприклад, запуск, крейсерський політ, спуск) характеристики шуму датчиків змінюються. Адаптивне налаштування фільтра, що базується на швидкості, вібрації або даних про навколишнє середовище, дозволяє вашій системі налаштовуватися за потреби.
- Корекція замкнутого циклу утримує речі в межах норми.
Використовуйте оновлення даних ГНСС, одометрії, барометра або магнітометра для обмеження зростання похибки. Навіть низькошвидкісна корекція кожні кілька секунд значно покращує продуктивність у довготривалих завданнях.
Найважливіше: програмне забезпечення не може винайти точність, але воно може її захистити , розширити та відновити, коли щось піде не так. І це саме те, що має робити хороша INS.
Роль злиття датчиків у придушенні дрейфу INS
Навіть найкраща інерціальна навігаційна система дрейфуватиме — це не недолік, це фізика . Справжнє питання полягає в тому, як обмежити цей дрейф за допомогою інших датчиків. Саме тут об'єднання датчиків стає найпотужнішим інструментом у системі.
ГНСС + ІНС: Класичне рішення
Коли GNSS доступний, навіть періодично, він забезпечує оновлення абсолютного положення, щоб обмежити дрейф INS.
Найкраще підходить для: тривалих місій, мобільного картографування, безпілотних літальних апаратів
Перевага: точні корекції, зрілі фільтри (EKF)
Застереження: вразливість до глушіння, випадання сигналу та багатопроменевості
Гібрид FOG + MEMS: баланс точності та вартості
Поєднання стабільного FOG (вулевого елемента керування) з чуйною MEMS-системою дає вам найкраще з обох світів — низький дрейф та швидку реакцію.
Найкраще підходить для: БПЛА середнього розміру, військово-морських платформ, роботизованих систем
Перевага: кращий ARW + менший SWaP
Застереження: вимагає ретельної інтеграції та перехресного калібрування
Зір / LiDAR + INS: безперервність без GNSS
Візуальна одометрія або LiDAR SLAM можуть надавати дані про відносне положення, коли GNSS недоступний, наприклад, у приміщенні або під землею.
Найкраще підходить для: автономних транспортних засобів, тунелів, складів, шахт
Перевага: повністю автономний
Застереження: потрібна лінія видимості, чутливість до освітлення або щільності елементів
Час – це все. Fusion працює лише за умови синхронізації датчиків. Неправильно вирівняні часові позначки завдають більше шкоди, ніж користі.
На практиці: Fusion — це не додавання додаткових датчиків, а знання того, якому з них довіряти у потрібний момент.
Підхід GuideNav до надійності INS
Після всього, що я бачив у польових умовах — у безпілотниках, геодезичних апаратах, морських системах — одне залишається незмінним: справжня продуктивність INS залежить від усього, що оточує датчик .
У GuideNav саме на цьому ми зосереджуємося.
- Кожен пристрій повністю калібрований за температурою та осями , а не лише протестований партією.
- Ми надаємо реальні дані про дисперсію Аллана та підтримку налаштування фільтрів, а не лише специфікації.
- Наші моделі FOG та MEMS оснащені інструментами інтеграції, готовими до використання в польових умовах : стабільним таймінгом, чіткими інтерфейсами та підтримкою термоядерного синтезу.
- А оскільки ми не підпадаємо під дію ITAR , наші системи готові до глобального розгортання в оборонних, промислових або дослідницьких програмах.
Ви отримуєте не просто датчик — ви отримуєте навігаційну платформу, якій можна довіряти, коли інші системи виходять з ладу.