Автономні транспортні засоби не можуть безпечно рухатися, не знаючи свого точного місцезнаходження, проте звичайний GPS з його похибкою 1–3 м є занадто грубим для прийняття рішень на рівні смуги руху. У міських каньйонах або тунелях сигнали повністю зникають, залишаючи систему «сліпою». Щоб досягти точності на рівні сантиметра, сучасні платформи для автономного керування покладаються на мультисенсорне об'єднання даних, поєднуючи GNSS, IMU, LiDAR та візуальне сприйняття, щоб забезпечити безперервну та надійну локалізацію за будь-яких умов руху.
Автономні транспортні засоби досягають точності на сантиметровому рівні завдяки інтеграції GNSS/INS, картографуванню LiDAR та візуальному сприйняттю, а високоточні IMU формують основу локалізації у разі зникнення сигналів GPS.
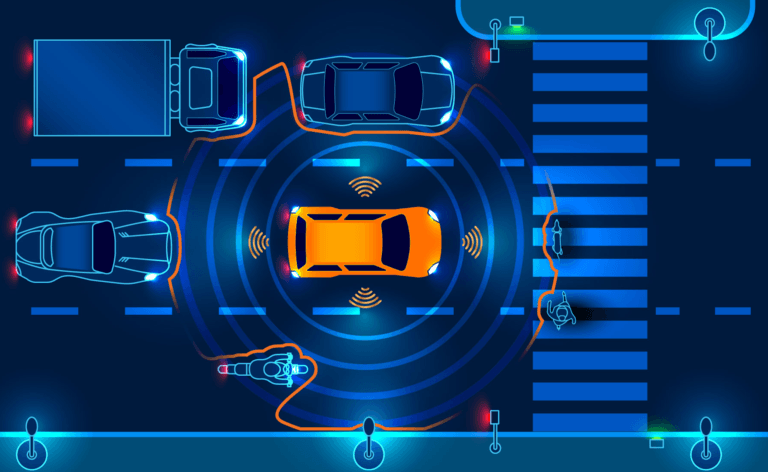
Локалізація — це невидима основа автономного водіння. Вона повідомляє транспортному засобу точне місцезнаходження, навіть коли супутники зникають. Поєднуючи дані IMU, GNSS, LiDAR та камер, сучасні системи підтримують точне позиціонування на кожній дорозі, тунелі та міському каньйоні.
Зміст
Основні технології автономної локалізації
Сучасна локалізація автономного водіння поєднує чотири основні технології сенсорних датчиків, кожна з яких відіграє унікальну роль у сприйнятті та навігації:
- ГНСС (Глобальна навігаційна супутникова система): забезпечує глобальні координати та абсолютне місцезнаходження.
- INS (Інерціальна навігаційна система): відстежує рух за допомогою акселерометрів та гіроскопів, усуваючи прогалини, коли сигнали GNSS зникають.
- LiDAR (визначення світла та дальності): генерує 3D-карти навколишнього середовища для просторового зіставлення на сантиметровому рівні.
- Системи зору: Використовуйте камери для ідентифікації розмітки смуг руху, дорожніх знаків та орієнтирів для семантичного розуміння.
Разом ці системи створюють резервну, взаємодоповнюючу архітектуру , яка забезпечує точну локалізацію за складних дорожніх, погодних та освітлювальних умов. Однак серед них ГНСС залишається відправною точкою, а її обмеження показують, чому злиття даних є важливим.
Чому лише ГНСС не може зробити автомобілі автономними
Стандартний GPS пропонує точність лише 1–3 м — що добре для телефонів, але фатально для безпілотних автомобілів . Навіть невеликий зсув може зіштовхнути автомобіль з розміткою смуги руху або неправильно розпізнати поворот.
У міських каньйонах або тунелях сигнали відбиваються або повністю зникають, створюючи непередбачувані стрибки, відомі як помилки багатопроменевості . Ці прогалини роблять чистий GPS ненадійним, доводячи, що автономним системам потрібне об'єднання датчиків для безперервної локалізації на сантиметровому рівні .
Підвищення точності GNSS для автономного водіння
Для покращення стандартної продуктивності GPS методи корекції GNSS , такі як RTK . Отримуючи дані про похибки в режимі реального часу від опорних станцій , ці системи можуть досягати точності 5–10 см , що дозволяє позиціонувати на рівні смуги руху .
Однак, ГНСС все ще залежить від видимості в чистому небі та стабільного зв'язку . У тунелях або міських районах сигнали погіршуються або зникають, що доводить, що самого лише супутникового позиціонування недостатньо для безперервної локалізації його має підтримувати INS .
Коли GNSS виходить з ладу, INS тримає транспортний засіб у курсі подій
Коли супутники зникають, інерціальна навігаційна система (INS) . Використовуючи бортовий інерціальний вимірювальний блок (IMU) , вона відстежує рух за допомогою прискорення та кутової швидкості, що дозволяє апарату точно визначити своє місцезнаходження навіть без зовнішніх сигналів.
Ця незалежність робить INS мостом для прокладання тунелів, підземних переходів або міських каньйонів. Однак з часом похибки накопичуються, що призводить до поступового відхилення . Щоб залишатися точним, INS має постійно коригуватися за допомогою GNSS або інших датчиків, таких як LiDAR та камери .
Всередині INS: Основа інерційної локалізації
Інерціальна навігаційна система (INS) є основою автономної локалізації — автономного навігаційного рішення, яке дозволяє транспортним засобам відстежувати своє місцезнаходження, швидкість та орієнтацію навіть за зникнення зовнішніх сигналів.
З чого складається INS?
- Набір з трьох гіроскопів вимірює кутову швидкість для фіксації обертального руху.
- Набір з трьох акселерометрів вимірює лінійне прискорення по всіх осях.
- Разом ці датчики утворюють інерційний вимірювальний блок (IMU) , який безперервно виявляє кожен ледь помітний рух транспортного засобу в режимі реального часу.
Як працює Служба імміграційних та натуралізаційних послуг (INS)
Інтегруючи вимірювання IMU, INS розраховує положення, швидкість та положення відносно початкової точки відліку. Навіть коли сигнали GNSS зникають , система продовжує оцінювати рух за допомогою точного відліку , забезпечуючи плавну та безперебійну локалізацію.
Чому важлива якість INS
Точність INS залежить від продуктивності датчика, включаючи стабільність зміщення , кутове випадкове блукання (ARW) та температурну компенсацію . Високоякісний INS підтримує субметрову точність протягом тривалого часу в середовищах, де немає ГНСС , забезпечуючи стабільну навігацію в тунелях, містах та покритих маршрутах.
Злиття даних INS та GNSS: золотий стандарт галузі
Додаткові сильні сторони
Жодна з систем не може ідеально функціонувати самостійно.
ГНСС забезпечує глобальне позиціонування, але втрачає надійність через перешкоди сигналу, тоді як ІНС пропонує безперервне відстеження руху, яке поступово зміщується з часом.
Поєднуючи обидва ці фактори, автономні транспортні засоби досягають абсолютної точності та короткочасної стабільності .
Ф'южн у дії
Завдяки вдосконаленій фільтрації Калмана дані з GNSS та INS об'єднуються в режимі реального часу:
- Коли ГНСС доступний, він постійно коригує дрейф INS.
- Коли сигнал GNSS втрачається, INS підтримує точні оновлення руху, доки не повернуться сигнали супутників.
Цей цикл прогнозування та оновлення забезпечує безперебійну та надійну локалізацію — навіть у тунелях або щільних міських каньйонах.
Галузевий стандарт
Ця інтеграція стала наріжним каменем сучасної автономної навігації .
Добре відкалібрована система GNSS/INS забезпечує сантиметрову точність у динамічних умовах, гарантуючи як прецизійність, так і надійність у будь-яких умовах руху.
Від координат до реальності: як працює математика локалізації
Точна локалізація залежить від перетворення даних між двома системами координат — системою транспортного засобу , яка рухається разом з автомобілем, та системою карти , закріпленою на Землі. За допомогою матриць обертання або кватерніонів дані датчиків, такі як прискорення та кутова швидкість, перетворюються на глобальну орієнтирну систему. Без такого вирівнювання навіть точні датчики неправильно зчитували б рух, що призводило б до дрейфу та похибки позиціонування.
Роль лідара в точності вимірювання на сантиметровому рівні
Коли GNSS втрачає видимість, LiDAR бере на себе роботу.
На відміну від супутникового позиціонування, локалізація LiDAR використовує 3D-сканування в режимі реального часу, щоб «бачити» середовище навколо транспортного засобу.
Як це працює:
- Лідар безперервно випромінює лазерні імпульси для створення хмар точок .
- Ці сканування зіставляються з картою високої чіткості за допомогою таких алгоритмів, як ICP (ітеративна найближча точка) або NDT (нормальне перетворення розподілу) .
- Система мінімізує просторові похибки, щоб оцінити положення та орієнтацію з точністю до сантиметра.
Чому це має значення:
Цей метод забезпечує стабільну локалізацію в тунелях , міських каньйонах або лісистих дорогах , де сигнали GNSS ненадійні або повністю втрачаються.
Бачити — значить вірити: візуальна локалізація та картографування на рівні смуг руху
З розвитком систем автономного водіння візуальна локалізація стала незамінним доповненням до GNSS та LiDAR. У той час як супутники забезпечують глобальний охоплення, а LiDAR гарантує геометричну точність, камери додають контекст і значення , дозволяючи транспортним засобам інтерпретувати своє оточення так само, як це роблять люди.
Роль зору в локалізації
Візуальні датчики забезпечують семантичне розуміння автономної навігації. Камери фіксують розмітку смуг руху , дорожні знаки та межі доріг , забезпечуючи багатий контекст, що виходить за рамки геометрії.
Основний процес
Отримані зображення порівнюються з картою високої чіткості . Алгоритми аналізують візуальні ознаки та застосовують ймовірнісну оцінку (наприклад, фільтрацію частинок) для визначення найімовірнішого положення транспортного засобу.
Головна перевага
На відміну від LiDAR, який вимірює форму, візуальна локалізація інтерпретує значення. Вона забезпечує точність на рівні смуги руху та підвищує стійкість до змін освітлення, дорожнього руху чи погодних умов.
Які труднощі досі обмежують локалізацію в реальному світі
Навіть з урахуванням передового поєднання GNSS, IMU, LiDAR та зору, локалізація в реальному світі все ще стикається з серйозними практичними перешкодами. Ідеальна точність у лабораторії не завжди означає непередбачуваність доріг.
Динамічні середовища
Дорожньо-будівельні роботи, припарковані транспортні засоби, пішоходи та тимчасові об'єкти створюють невідповідності між даними датчиків у реальному часі та попередньо створеними картами. Ці невідповідності можуть призвести до короткочасних помилок позиціонування.
Обслуговування карти
Карти високої чіткості потребують постійного оновлення. Сезонні зміни, ріст рослинності або незначні коригування розташування доріг можуть погіршити точність локалізації, якщо вони не відображаються в базі даних.
Калібрування датчика
Точне злиття залежить від точного вирівнювання LiDAR, камер та IMU. Навіть механічні зміщення міліметрового масштабу або теплове розширення можуть спричинити кутове зміщення, що з часом кумулятивного дрейфу
Чому якість IMU визначає майбутнє автономної навігації
Інерціальний вимірювальний блок (IMU) – це останній захист автономної локалізації. Коли GNSS та зір втрачають надійність, лише він допомагає транспортному засобу відстежувати його справжній рух. Стабільність будь-якої системи автономного керування залежить від того, наскільки точно IMU може вимірювати та підтримувати орієнтацію з часом.
Високоякісні інерційні модулі (ІМУ) вирізняються стабільністю зміщення , кутовим випадковим блуканням (ВББ) та тепловою компенсацією . Ці параметри визначають, як довго система може підтримувати точне відлікування без зовнішньої корекції. У той час як датчики споживчого класу можуть відхилятися на метри протягом кількох секунд, ІМУ тактичного класу можуть зберігати субметрову точність протягом кількох хвилин — це різниця між навігацією та плутаниною.
З розвитком автономності, IMU залишається її основою. Майбутні системи інтегруватимуть інерційне зондування з об'єднанням даних на основі штучного інтелекту та адаптивним моделюванням , але справжня надійність все одно виходитиме з одного основного принципу: якість зондування руху визначає впевненість навігації.
