Інерціальні вимірювальні блоки (ІВБ) є основою навігаційних систем у барражуючих ракетах. Вони надають дані, необхідні для високоточного наведення ракети до цілі. Без надійного ІВБ ракеті буде важко підтримувати стабільну траєкторію польоту, що може поставити під загрозу її місію.
Інерціальний вимірювальний блок (ІВБ) – це пристрій, який вимірює прискорення, швидкість та орієнтацію об'єкта. Роль ІВБ для барражуючої ракети полягає в тому, щоб забезпечити точність досягнення ракетою цілі.
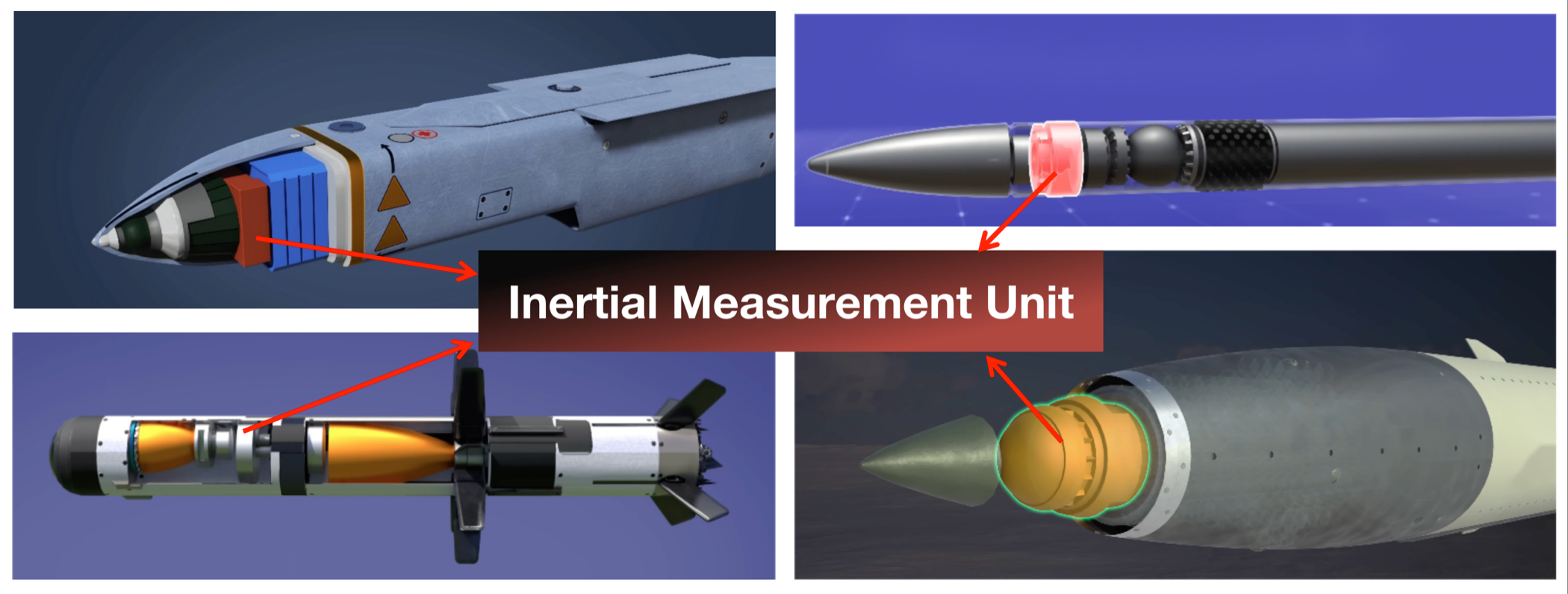
У цій статті я розгляну критичні компоненти, що складають ІМУ, ключові показники застосування барражуючих ракет та який тип ІМУ найкраще підходить для цих операцій з високими ставками.
Зміст
Що таке інерціальний вимірювальний блок (ІВБ)?
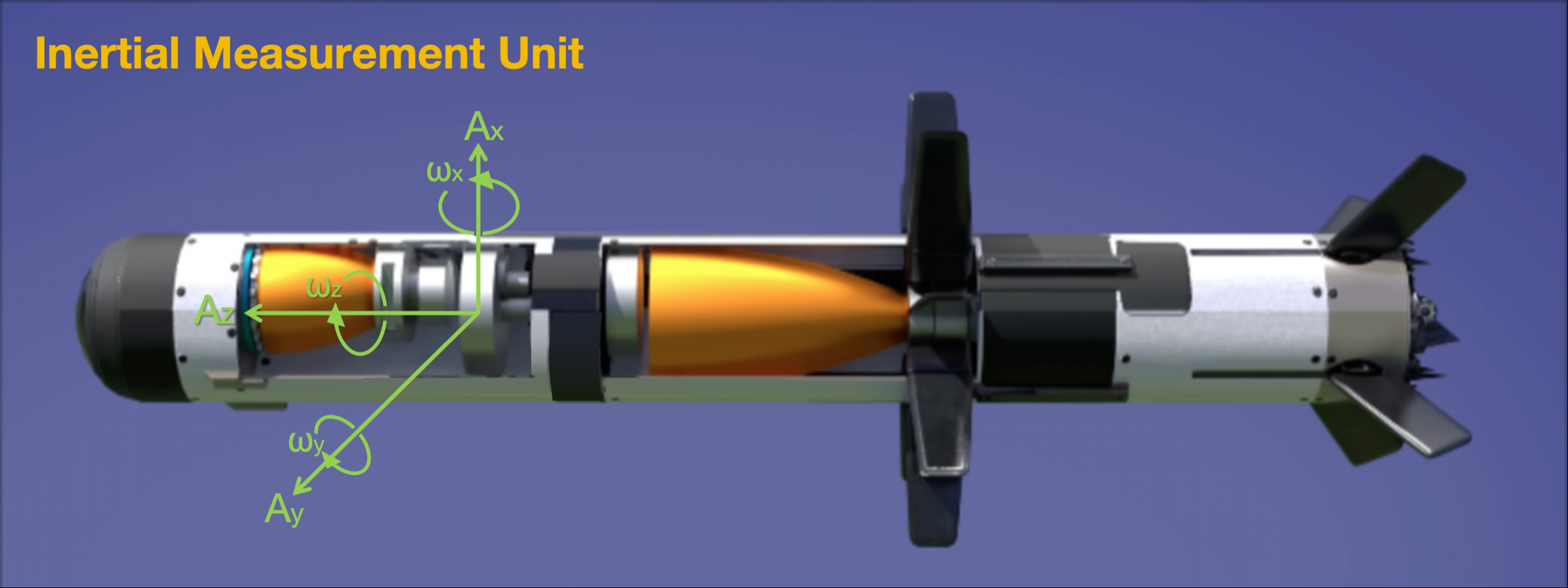
Інерціальний вимірювальний блок (IMU) – це пристрій, який вимірює прискорення, швидкість та орієнтацію об'єкта. Він працює без потреби у зовнішніх сигналах. Ця незалежність робить його ідеальним для використання в середовищах, де сигнали GPS можуть бути ненадійними. Усередині IMU зазвичай знаходяться акселерометри та гіроскопи. Ці датчики працюють разом для відстеження руху та обертання, забезпечуючи точність траєкторії польоту ракети.
Як інженер, який пропрацював у галузі інерціальної навігації понад 8 років, можу сказати, що ключова роль інерціального навігаційного модуля (ІМУ) полягає в наданні даних про швидкість, положення та кут польоту ракети в режимі реального часу . Це дозволяє системі керування ракетою постійно коригувати траєкторію польоту. Такий рівень точності життєво важливий для тривалих польотів та цілеспрямованих ударів .
Чому барражувальні ракети покладаються на інерціальний вимірювальний блок (IMU)?
Барражуючі ракети призначені для тривалого перебування в повітрі, одночасно спостерігаючи за цілью. Для цього необхідна точна навігація. Інерційна система управління (IMU) дозволяє ракеті постійно коригувати свій курс, компенсуючи зміни швидкості, вітру чи інших факторів навколишнього середовища. Якщо ракета не має точних даних про місцезнаходження, вона може відхилитися від курсу. А це може призвести до провалу місії або, що ще гірше, до невдалого удару по цілі.
Для ракетних систем високоточні дані стосуються не лише керування ракетою в певне місце. Йдеться про забезпечення того, щоб ракета могла точно та надійно маневрувати на великих відстанях. Інерційна система управління (ІМУ) є ключем до досягнення такого рівня точності. Без неї ракета не змогла б коригувати курс у режимі реального часу. Це означає вищі ризики, більше втрачених ресурсів та менш ефективні місії.
Ключові параметри для барражуючих ракетних інерційних установок (ІМІ)
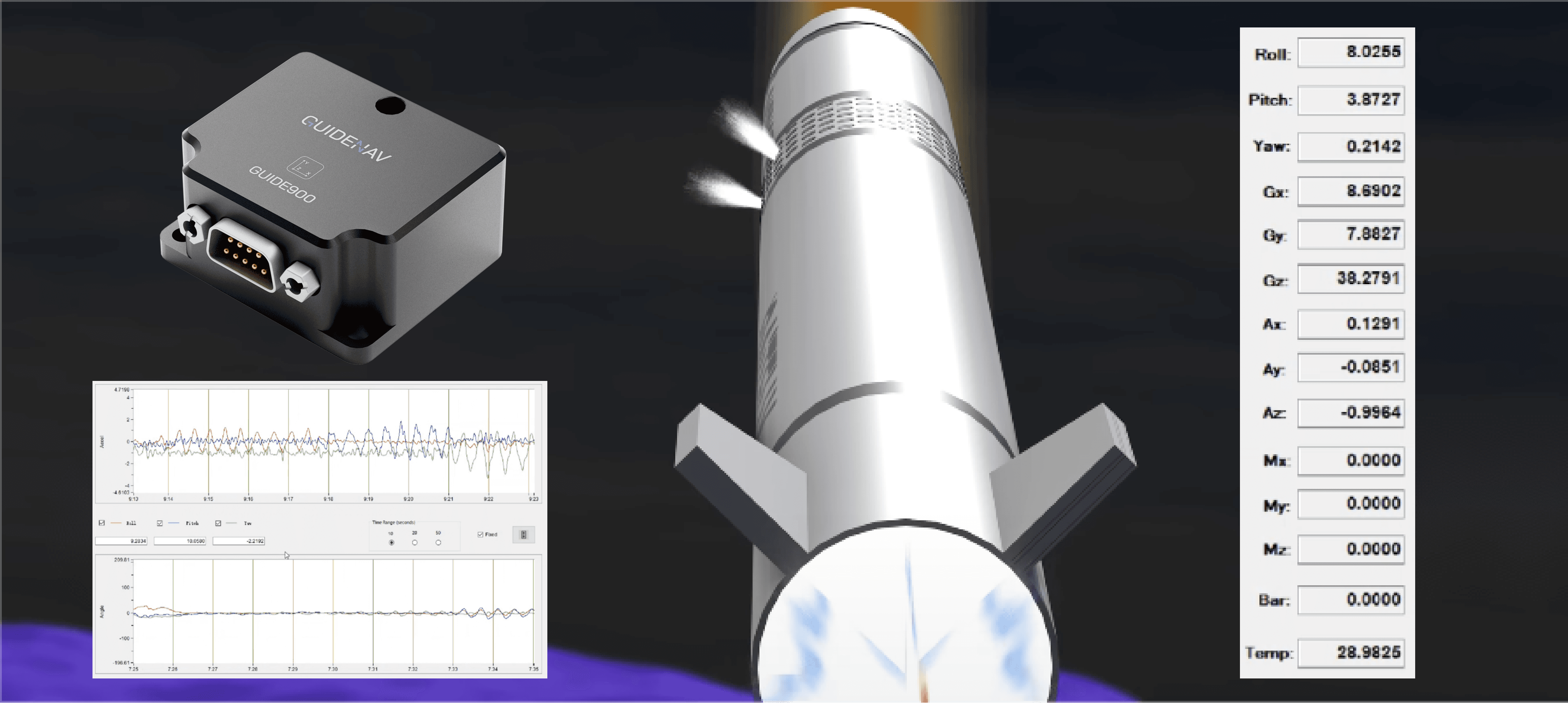
Коли йдеться про інерційні блоки (ІББ) для барражуючих ракет, точність не підлягає обговоренню. Однак є й інші важливі параметри, які слід враховувати. Стабільність зміщення ІББ має вирішальне значення, оскільки будь-який дрейф може призвести до помилок з часом. Аналогічно, швидкість дрейфу визначатиме, наскільки система може відхилятися, перш ніж знадобиться повторне калібрування. ІББ також повинен забезпечувати швидке оновлення даних з мінімальною затримкою . Швидкість має вирішальне значення для коригування в режимі реального часу.
| Параметр | Опис | Важливість для барражуючих ракет |
|---|---|---|
| Точність | Здатність IMU вимірювати точний рух. | Необхідно для утримання ракети на курсі під час тривалих польотів. |
| Стабільність зміщення | Стабільність показань датчиків з часом. | Запобігає поступовому дрейфу, який може збити ракету з траєкторії. |
| Швидкість дрейфу | Швидкість відхилення показань IMU. | Низький дрейф забезпечує постійну точність без повторного калібрування. |
| Затримка | Затримка між вхідним і вихідним сигналами датчика. | Швидка обробка має вирішальне значення для негайного коригування курсу. |
Як людина з багаторічним досвідом роботи в інерціальних навігаційних системах, я на власні очі бачив, як низький дрейф і швидкий час відгуку можуть мати вирішальне значення для успішної місії. Інерціальні навігаційні модулі з поганою стабільністю зміщення або високою швидкістю дрейфу просто не можуть забезпечити необхідну продуктивність, особливо в ракетних системах, які потребують швидкого та частого налаштування.
Вимоги до точності блоку інерційної оборони барражуючих ракет
Точність (стабільність зміщення) інерційного вимірювального блоку для барражуючої ракети може змінюватися залежно від складності місії та залежності від зовнішніх навігаційних систем. Нижче наведено короткий виклад вимог до стабільності зміщення для різних сценаріїв:
1. Місії високої точності удару (наприклад, високоточні керовані атаки)
- Стабільність зміщення : від 01°/год до 0,1°/год
Причина:
- Для точного ураження цілей потрібна висока точність, особливо для складних сценаріїв місій, що передбачають високоточні удари.
- ІМУ повинна забезпечувати стабільний політ і точне націлювання, особливо під час останнього заходу на посадку.
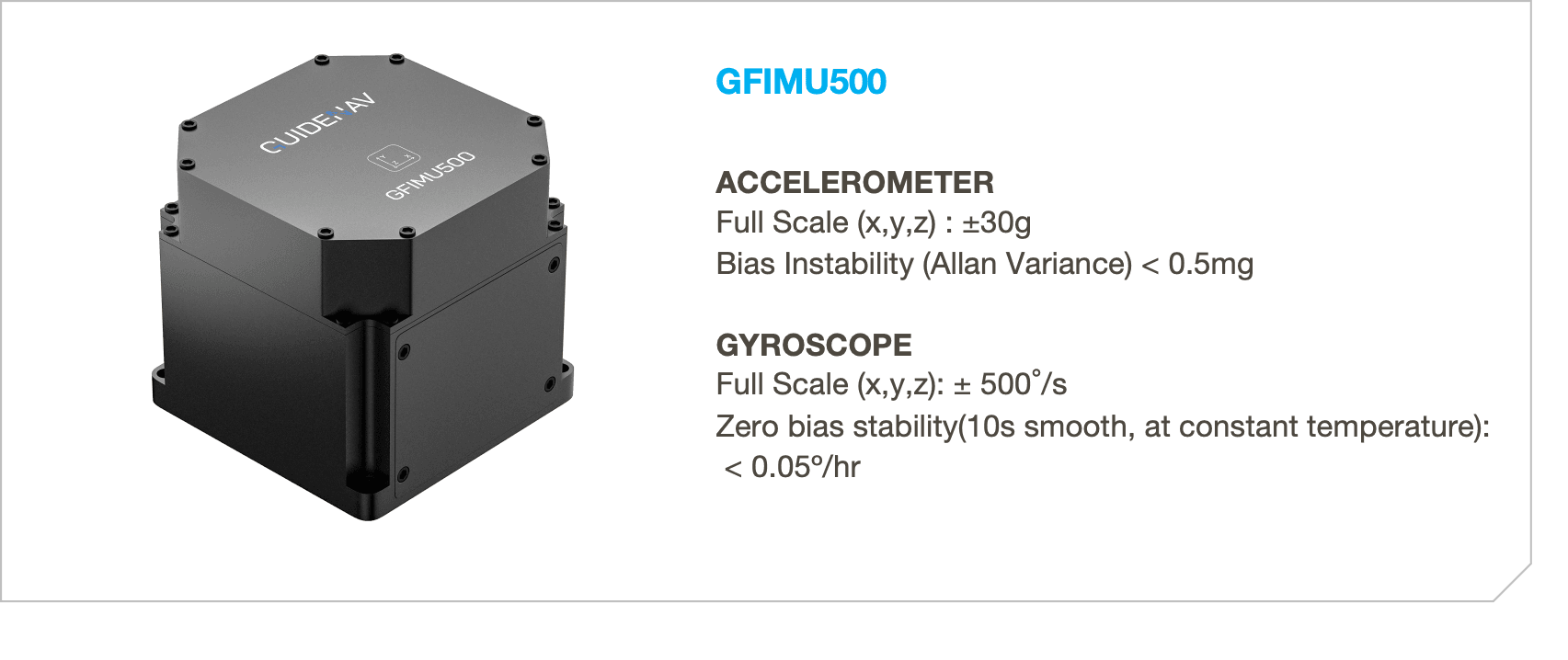
Рекомендований тип IMU : IMU на основі волоконно - оптичного гіроскопа
Рекомендована модель FOG IMU: GFIMU 400, GFIMU 500

2. Місії середньої точності (наприклад, загальні удари по полю бою)
- Стабільність зміщення : від 1°/год до 0,5°/год
Причина:
- Помірна точність потрібна для загальних бойових місій, де ціль може бути менш критичною, а зона ураження більш гнучкою.
- ІМУ може бути доповнений іншими системами наведення, такими як візуальні або GPS-системи, для підтримки точності.
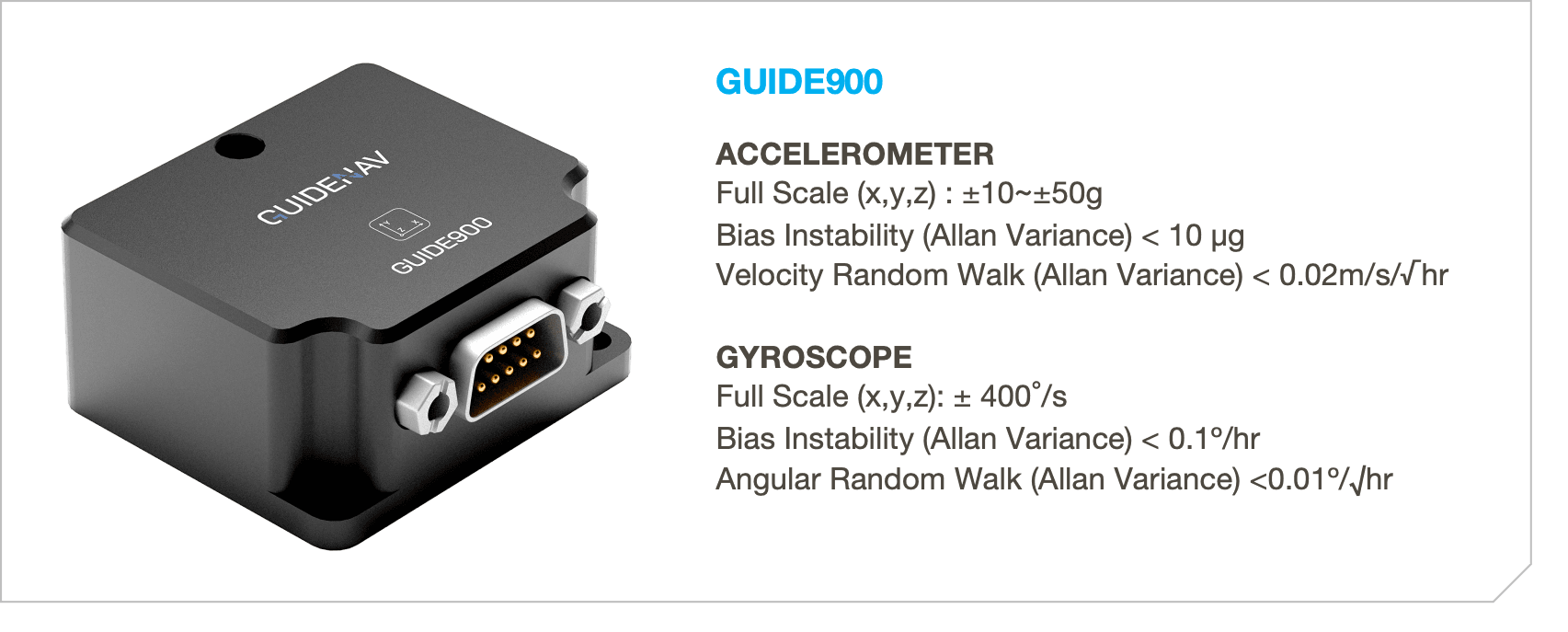
Рекомендований тип IMU : MEMS IMU або FOG IMU (залежно від вимог місії)
Рекомендована модель MEMS IMU: GUIDE900
3. Недорогі або простіші місії (наприклад, атака на менш цінні або рухомі цілі)
- Стабільність зміщення : від 5°/год до 2,5°/год
Причина:
- Для недорогих барражуючих ракет або менш критичних цілей точність інерційної системи управління (ІМУ) може бути послаблена, особливо коли час польоту короткий або складність місії низька.
- Ці системи можуть більше покладатися на навігацію платформи (наприклад, БПЛА) або прості бортові датчики, що зменшує потребу у високоточних інерційних блоках (ІМУ).
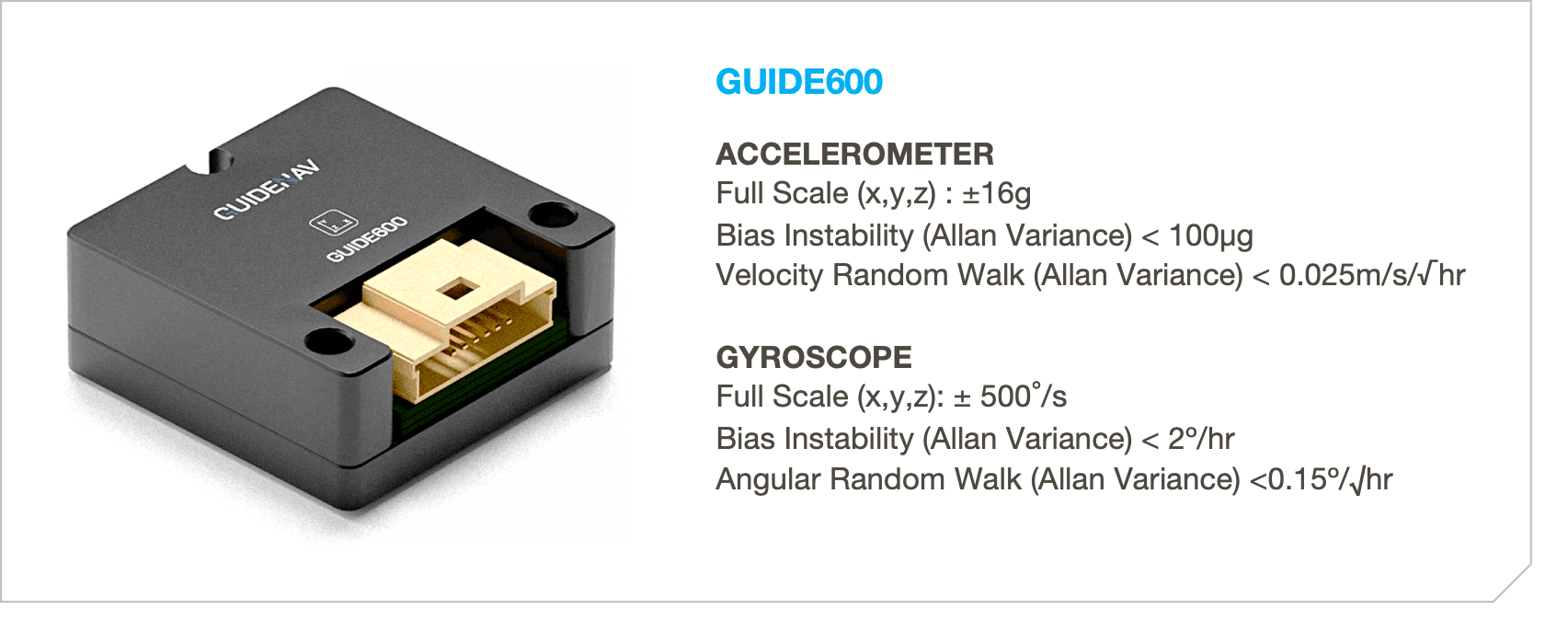
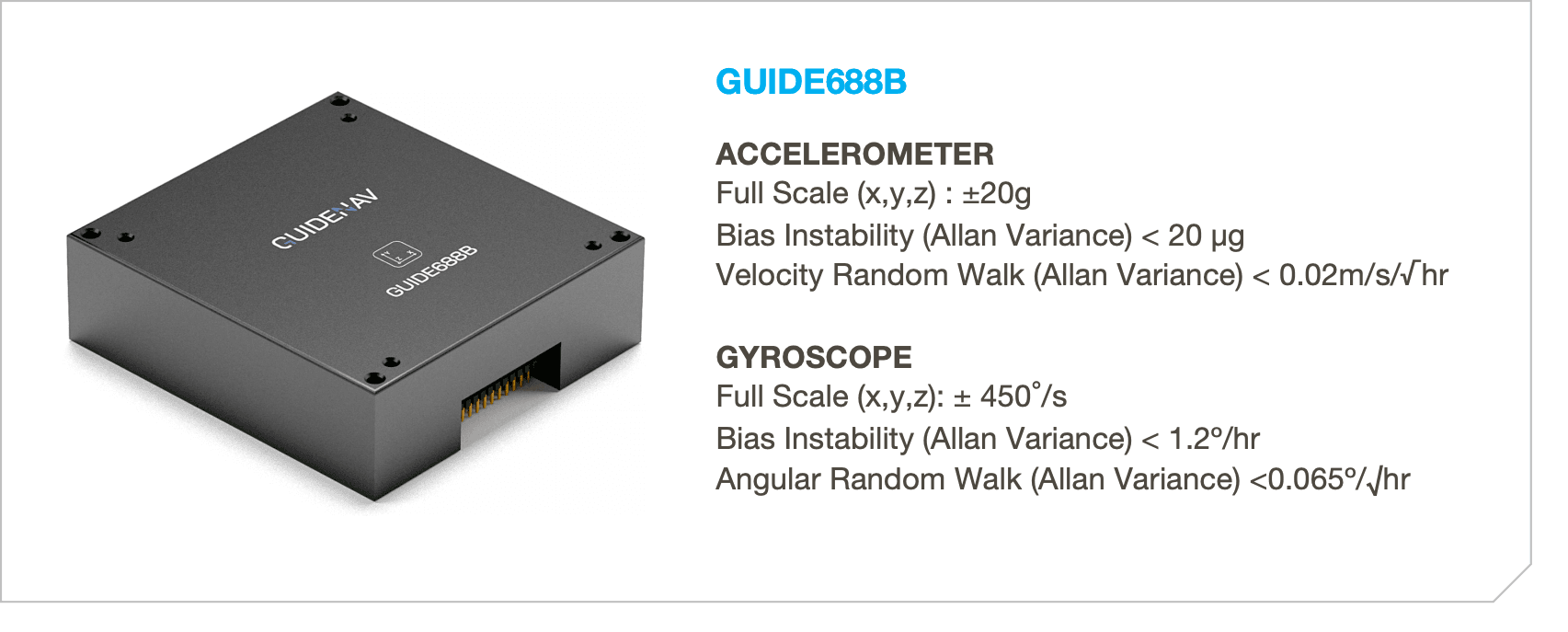
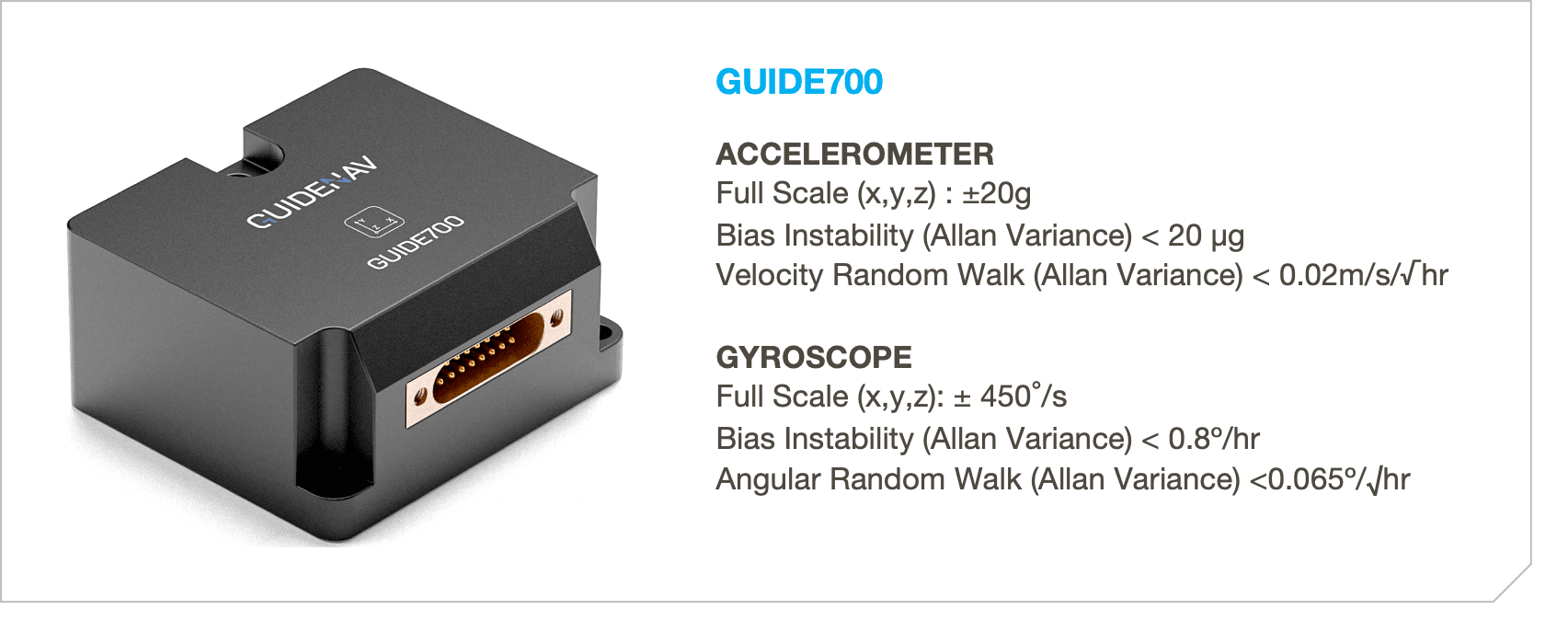
Рекомендований тип IMU : MEMS IMU
Рекомендована модель MEMS IMU: GUIDE700, GUIDE 688 B , GUIDE 600
4. Місії, що залежать від датчиків (наприклад, використання зовнішніх датчиків для цільового призначення)
- Стабільність зміщення : від 5°/год до 5°/год
Причина:
- Для місій, що сильно залежать від зовнішніх датчиків (наприклад, візуальних, радіолокаційних або GPS), точність IMU може бути послаблена, оскільки зовнішні системи виконують більшу частину навігації та наведення.
- ІМУ служить переважно додатковим датчиком, при цьому для успіху місії в першу чергу покладаються на зовнішні дані.
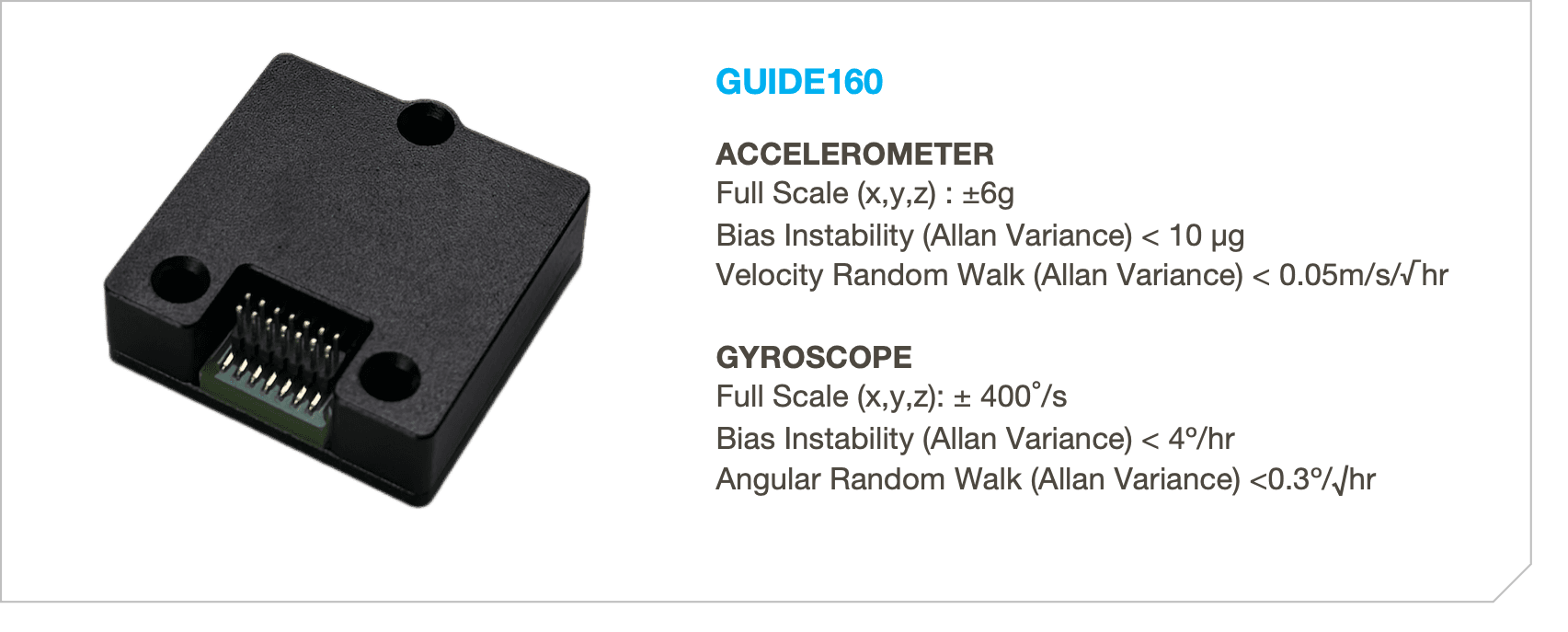
Рекомендований тип IMU : MEMS IMU
Рекомендована модель MEMS IMU: GUIDE160
Посилання
Для ракетних систем високоточні дані – це не просто керування ракетою [^1] до певного місця.
[^1]: Дослідження механіки керування ракетою дає уявлення про передові технології наведення ракет та їхню експлуатаційну ефективність.
ключові показники для застосування барражуючих ракет [^2]
[^2]: Розуміння ключових показників застосування баражуючих ракет може дати уявлення про їхню операційну ефективність та стратегічну цінність.