Ви коли-небудь намагалися інтегрувати навігаційну систему, але зрозуміли, що вона взагалі не визначає місцезнаходження?
Таке трапляється, коли люди плутають IMU з INS. Це звучить складно, але наслідки реальні: неправильний вибір обладнання, марна трата бюджету та системи, які просто не працюють належним чином. Виправлення? Розуміння ключових відмінностей між IMU та INS, а також того, для чого насправді призначений кожен з них. Цей посібник проведе вас крізь це — і все це простою англійською мовою.
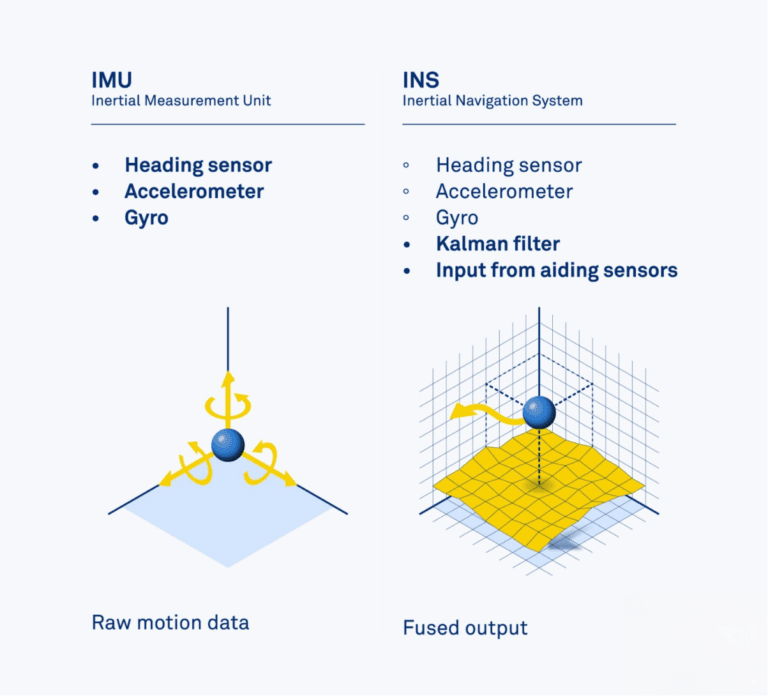
IMU вимірює рух, тоді як INS використовує дані IMU для обчислення положення та орієнтації з плином часу — IMU — це датчик, INS — це система.
Давайте розберемося з непорозумінням — крок за кроком.
Зміст

Що таке ІМУ?
Інерціальний вимірювальний блок (IMU) – це сенсорний пристрій, який вимірює прискорення та кутову швидкість . Зазвичай IMU побудований за технологіями MEMS, FOG або HRG, він включає акселерометри, гіроскопи та іноді магнітометри . Він виводить необроблені інерціальні дані, що використовуються для оцінки руху в просторі. IMU широко використовуються в безпілотних літальних апаратах, робототехніці, транспортних засобах та смартфонах. Однак самі по собі вони не забезпечують визначення положення чи орієнтації , якщо не інтегровані з додатковою обробкою. IMU різняться за точністю, від недорогих комерційних до тактичних та навігаційних датчиків, таких як GMS400 від GuideNav.

Що таке INS?
Інерціальна навігаційна система (INS) – це комплексна система, яка використовує дані IMU для розрахунку положення, швидкості та орієнтації в режимі реального часу. Зазвичай вона включає:
- Вбудований IMU
- Потужний вбудований процесор
- Алгоритми об'єднання датчиків (наприклад, фільтр Калмана )
- Часто модуль GNSS для допомоги
INS виконує інтеграцію виходів IMU в режимі реального часу для забезпечення безперервного навігаційного рішення. Завдяки цьому він може працювати навіть в середовищах, де відсутня GNSS, протягом обмеженого часу, що робить його важливим в аерокосмічній, морській та автономній галузях . Такі системи, як GFS120 та GUIDE2D від GuideNav, є прикладами такої інтеграції.
Чим відрізняються IMU та INS?
Більшість людей спрощують це, кажучи: «INS — це просто IMU з модулем GNSS». Технічно, це лише початок, але це далеко не вся картина.
Так, INS містить IMU в своїй основі. Але він також інтегрує процесор, GNSS (часто з підтримкою RTK або SBAS), а іноді й зовнішні допоміжні датчики, такі як датчики коліс, датчики швидкості повітря, барометричні висотоміри або доплерівські лаги швидкості (DVL) . Ці доповнення дозволяють INS об'єднувати дані в режимі реального часу, надаючи не лише дані про рух, але й високодостовірні оцінки положення, швидкості та орієнтації.
Уявіть собі IMU як термометр — він показує необроблені дані. INS — це звіт про погоду: відфільтрований, об'єднаний і готовий до дії.
| Функція | ІМУ | ІНС |
|---|---|---|
| Основна функція | Вимірює прискорення та обертання | Обчислює повне положення, швидкість, орієнтацію |
| Компоненти | Акселерометр, гіроскоп | IMU + GNSS + процесор + додаткові датчики |
| Вихід | Необроблені дані руху | Об'єднані навігаційні дані (в режимі реального часу) |
| Підтримка ГНСС | Жоден | Вбудований (RTK/SBAS опціонально) |
| Зовнішня допомога | Не застосовується | Одометр, DVL, швидкість, висотомір тощо. |
Чи можна орієнтуватися лише за допомогою інерційного модуля (IMU)?
Уявіть собі ІМУ як відчуття руху із заплющеними очима. Ви можете відчувати, що рухаєтеся вперед або повертаєте, але не маєте уявлення, де ви знаходитесь. Саме це відбувається, коли ви намагаєтеся орієнтуватися, використовуючи лише ІМУ.
Звичайно, ви можете інтегрувати прискорення з плином часу, щоб оцінити положення. Але крихітні помилки швидко накопичуються, перетворюючись на величезні помилки протягом кількох секунд. Це називається дрейфом, і це робить автономні інерційні модулі (ІМУ) ненадійними для навігації.
Вони чудово підходять для короткочасної стабілізації, наприклад, для підтримки рівня карданного підвісу, але не для визначення того, де ви знаходитесь або куди прямуєте. Для цього вам потрібен INS.
Як INS обробляє дані IMU?
На відміну від IMU, який відчуває лише рух, INS інтерпретує цей рух і перетворює його на повноцінну навігаційну інформацію. Це включає знання того, де ви знаходитесь, як швидко ви рухаєтеся та в якому напрямку ви дивитеся. Але це не відбувається автоматично. Це вимагає ланцюга ретельно розроблених кроків, що поєднують фізику, математику та корекцію в режимі реального часу, щоб перетворити необроблені сигнали на надійну навігацію.
Давайте розглянемо процес:
1. Виявлення руху (вхід IMU)
Все починається з інерційного модуля (IMU), який безперервно вимірює прискорення (за допомогою акселерометрів) та кутову швидкість (за допомогою гіроскопів). Ці значення відображають те, як система рухається у тривимірному просторі.
➡ Цей крок надає INS необроблену інформацію про рух.
2. Обчисліть швидкість та положення
INS інтегрує прискорення для отримання швидкості, а потім інтегрує швидкість для оцінки положення з плином часу. Це показує системі, яку відстань вона пройшла від своєї початкової точки.
➡ Ось як INS відстежує рух — навіть без GPS.
3. Орієнтація на оцінку
Обробляючи дані гіроскопа та враховуючи вектори, такі як гравітація та магнітне поле Землі, INS визначає крен, тангаж та рискування — вашу повну 3D-орієнтацію.
➡ Цей крок допомагає системі зрозуміти, як вона обертається або нахиляється.
4. Застосуйте об'єднання датчиків для підвищення точності
Дані IMU самі по собі з часом дрейфують. INS використовує інтелектуальні алгоритми, такі як фільтри Калмана, для поєднання вхідних даних IMU з іншими датчиками:
- ГНСС / RTK / SBAS
- Одометри коліс
- DVL або датчики швидкості повітря
- Барометричні висотоміри
Ці корекції значно покращують точність і довгострокову стабільність.
➡ Fusion забезпечує надійність системи, навіть коли деякі датчики втрачають сигнал.
5. Надання навігаційних даних у режимі реального часу
Кінцевий результат — це безперервний потік даних про місцезнаходження, швидкість та положення в режимі реального часу, який оновлюється багато разів на секунду та готовий до використання диспетчерами польотів, автопілотами або системами картографування.
➡ Саме це робить INS комплексним навігаційним рішенням.
Продукти INS від GuideNav дотримуються цієї архітектури — з механізмами термоядерного з'єднання, налаштованими для умов, де відсутня GNSS, динамічних середовищ та платформ з високою вібрацією. Результат: надійна навігація, якій ви можете довіряти, коли це найбільше потрібно.
Коли IMU достатньо для вашої заявки?
IMU – це все, що вам потрібно, якщо вашій системі потрібно лише відчувати рух , а не обчислювати положення чи напрямок з плином часу. Він ідеально підходить, коли ви реагуєте на рух, а не намагаєтеся відстежувати абсолютне місцезнаходження.
Звичайні випадки використання включають:
Стабілізація камери
Виявляє вібрацію або нахил, щоб допомогти двигунам утримувати камеру в стабільному положенні.
Відстеження жестів
У AR/VR або носимих пристроях, де ви стежите за рухом, а не за точним положенням.
Короткострокова орієнтація
Використовується в дронах або роботах під час запуску, зависання або швидких маневрів.
Підтримка управління польотом
У поєднанні з GNSS або оптичним потоком, IMU забезпечують швидкий зворотний зв'язок для стабілізації дрона.
Просто пам’ятайте: IMU дають лише сире прискорення та обертання. Якщо вам потрібна орієнтація або швидкість, вам доведеться самостійно побудувати математику — фільтри, корекцію дрейфу тощо.
Якщо це в межах можливостей вашої системи, IMU — це легке, доступне та ефективне рішення.
Коли вам дійсно потрібна повна INS?
Вам потрібна повна INS, коли ваша система повинна завжди знати точне місцезнаходження та орієнтацію , особливо в середовищах, де GNSS може вийти з ладу або бути недоступною.
Типові випадки використання включають:
- Середовища, де заборонено використовувати ГНСС: тунелі, приміщення, під водою або міські каньйони
- Високодинамічні платформи: такі як дрони, ракети та позашляховики, які потребують швидких і точних оновлень
- Зрахування місця: коли система повинна підтримувати навігацію між сигналами GNSS — або взагалі без GNSS
- Завдання, що вимагають критичної точності: такі як картографування, цільове призначення або автономне водіння
У таких ситуаціях лише IMU швидко дрейфуватиме, що призведе до ненадійних результатів. INS вирішує цю проблему, об'єднуючи інерціальні дані з GNSS та додатковими датчиками, такими як DVL, одометри або альтиметри.
Які поширені помилки при виборі IMU або INS?
Будемо відверті — коли справа доходить до інерційних датчиків, легко зробити неправильний вибір, особливо якщо ви новачок у цій галузі. Я бачив, як команди вибирали неправильний інструмент більше разів, ніж можу порахувати. І справа рідко в технології — справа в неправильному розумінні проблеми.

Ось де зазвичай все йде не так:
Помилка №1: Думка, що ІМУ дає вам позицію
Це не так. ІМУ показує лише швидкість вашого руху або повороту. Якщо ви сподіваєтеся отримати координати в режимі реального часу одразу після встановлення, ви будете розчаровані.
Помилка №2: Використання початкового рівня IMU для вимогливої роботи
Недорогий датчик може виглядати добре на папері, але як тільки ви прикріпите його до швидко рухомого дрона або робота, шум і дрейф зіпсують ваші дані.
Помилка №3: Оплата за INS, коли IMU могла б допомогти
Якщо все, що вам потрібно, це стабілізувати камеру або визначити базову орієнтацію, повноцінний INS — це зайве. Не вирішуйте проблему вартістю 300 доларів рішенням вартістю 3000 доларів.
Помилка №4: Забуття про реальне середовище
Лабораторні характеристики не завжди відображають польові характеристики. Висока вібрація, екстремальні температури або ударні навантаження можуть швидко вивести з ладу дешеві датчики.
Помилка №5: Недооцінка зусиль з інтеграції
Необроблені дані IMU не можна налаштувати за принципом «підключи і працюй». Якщо у вас немає правильного програмного забезпечення, фільтрів чи алгоритмів, навіть найкращий датчик не надаватиме належної якості.
Яку підтримку пропонує GuideNav для вибору IMU/INS?
У GuideNav ми не просто постачаємо датчики — ми допомагаємо вам створити правильну систему . Ми пропонуємо:
- Індивідуальна консультація щодо застосування
- Зіставлення продуктивності IMU/INS
- Посібники з інтеграції для БПЛА, безпілотних літальних апаратів та морських систем
- Комплекти для доступу до технічних характеристик та оцінки
- Інженерна підтримка швидкого реагування
Незалежно від того, чи створюєте ви малопотужний БПЛА, чи навігаційну систему без підтримки GNSS, ми допоможемо вам вибрати між MEMS IMU, FOG IMU або повною INS залежно від вашого профілю місії.