У своїй роботі з розробки навігаційних систем я виявив, що справжня надійність випливає з незалежності, а не з залежності від зовнішніх сигналів. Саме тому інерціальні навігаційні системи (ІНС) відіграють таку важливу роль: вони працюють виключно на внутрішніх вимірюваннях, забезпечуючи послідовну та безперервну навігацію в широкому діапазоні середовищ, від автономних транспортних засобів до аерокосмічних платформ.
Інерціальна навігаційна система (INS) визначає положення, швидкість та орієнтацію, використовуючи лише внутрішні датчики руху, що забезпечує точну навігацію в широкому спектрі застосувань, включаючи автономні системи, підводні платформи та критично важливі оборонні операції.
Перш ніж вибрати INS для вашої програми, важливо чітко зрозуміти її принципи роботи та типи систем.
Зміст

Що таке інерціальна навігаційна система (ІНС)?
Інерціальна навігаційна система (ІНС) — це автономна система, яка використовує внутрішні датчики руху, зазвичай акселерометри та гіроскопи, для безперервного обчислення положення, швидкості та орієнтації платформи у тривимірному просторі. Оскільки ІНС не залежить від жодних зовнішніх орієнтирів, вона особливо цінна в середовищах, де потрібна стабільна та безперебійна навігація, зокрема під водою, під землею та у високодинамічних оборонних системах.
Які основні компоненти INS?
З мого досвіду розробки рішень INS, кожна система починається з трьох основних компонентів: гіроскопів, акселерометрів та навігаційного процесора. Для підвищення точності та стабільності ми часто інтегруємо додаткові датчики, такі як приймачі GNSS, магнітометри або барометричні альтиметри, для вдосконаленого об'єднання датчиків. Така архітектура дозволяє INS підтримувати надійне відстеження руху в різноманітних та складних умовах.

Гіроскопи
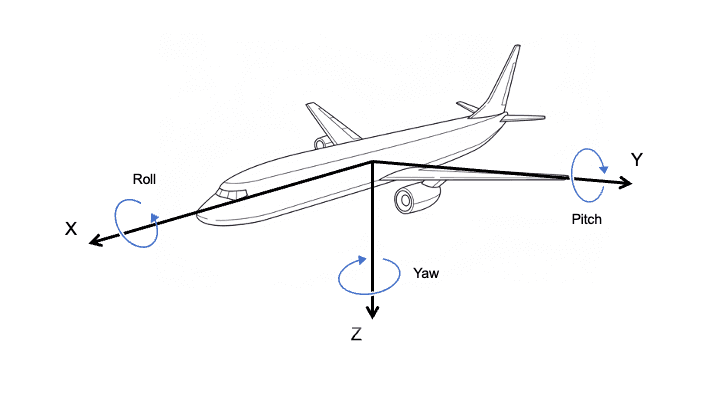
Гіроскопи вимірюють кутову швидкість вздовж трьох ортогональних осей (X, Y, Z), надаючи важливі дані для обчислення орієнтації — крен, тангаж та рискування. MEMS-гіроскопи широко використовуються для компактних застосувань, тоді як FOG (волоконно-оптичні гіроскопи) та RLG (кільцеві лазерні гіроскопи) пропонують вищу точність та довготривалу стабільність для тактичних та аерокосмічних систем.
Акселерометри
Акселерометри вимірюють лінійне прискорення вздовж кожної осі. При інтегруванні з часом ці значення дають зміни швидкості та переміщення. Високопродуктивні акселерометри з низькою нестабільністю зміщення та низьким рівнем шуму мають вирішальне значення для підтримки точності положення з часом.
Інерціальний навігаційний процесор
Процесор слугує обчислювальним ядром INS. Він об'єднує вхідні дані від датчиків руху, застосовує алгоритми компенсації та фільтрації, а також виводить дані про положення, швидкість та орієнтацію в режимі реального часу. Багато систем також підтримують інтеграцію зовнішніх датчиків та діагностику в режимі реального часу в рамках цього пристрою.
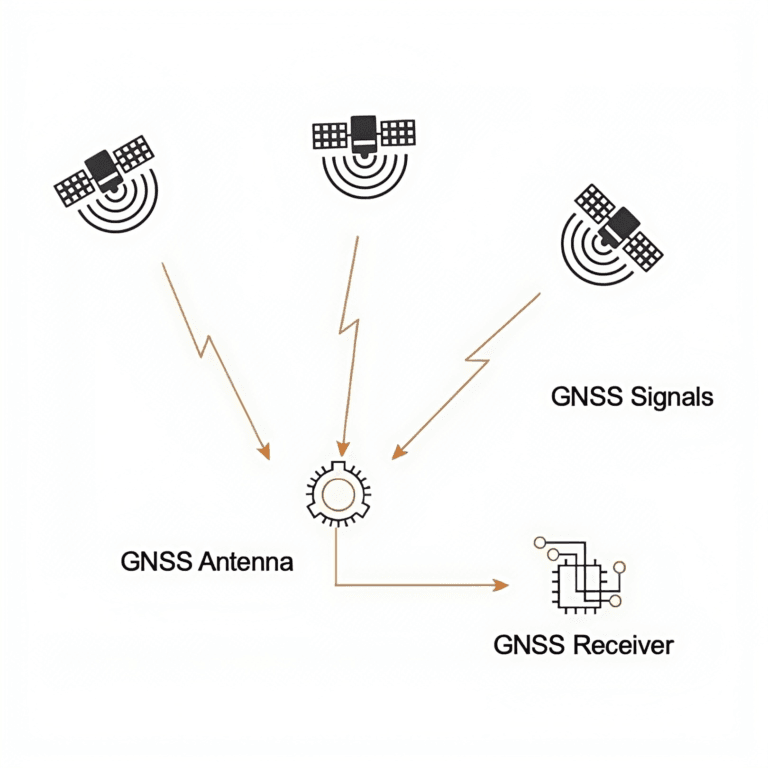
ГНСС-приймачі
Все більша кількість рішень INS зараз інтегрує приймачі GNSS для покращення довгострокової точності та глобального позиціонування. Поєднуючи інерціальні вимірювання із супутниковими даними, зазвичай за допомогою розширеної фільтрації Калмана, ці гібридні системи ефективно коригують дрейф та забезпечують надійну навігаційну продуктивність на автономних платформах, в аерокосмічних системах та геодезичних застосуваннях.
Магнітометри
Магнітометри допомагають визначати курс, вимірюючи магнітне поле Землі. Хоча вони менш точні, ніж гіроскопічні рішення, вони забезпечують корисний абсолютний орієнтир, особливо в умовах низької динаміки або в приміщеннях.
Барометричні альтиметри
Ці датчики забезпечують оцінку висоти на основі атмосферного тиску. Вони зазвичай використовуються в безпілотних літальних апаратах, літаках та наземних системах, яким потрібні дані вертикальної орієнтації в середовищах, де висота за даними GNSS може бути ненадійною.
Разом ці компоненти утворюють універсальну навігаційну систему, здатну надавати високошвидкісні дані про рух у режимі реального часу, незалежно від того, чи працює вона як чисто інерціальний пристрій, чи як частина тісно інтегрованого рішення GNSS/INS, розробленого для складних, динамічних середовищ.
Які різні типи INS: MEMS, FOG та RLG?
Інерціальні навігаційні системи можна загалом класифікувати залежно від типу гіроскопічної технології, яку вони використовують. Вибір технології визначає ключові характеристики, такі як стабільність зміщення, шум, дрейф та вартість, що робить вибір правильного типу для вашого застосування критично важливим.
1. MEMS INS (мікроелектромеханічні системи)
MEMS INS побудовано з використанням кремнієвих мікромеханічних гіроскопів та акселерометрів. Завдяки досягненням у виробництві напівпровідників, ці системи зараз широко використовуються на компактних платформах, де розмір, вага, потужність та вартість (SWaP-C) є основними обмеженнями.



2. FOG INS (INS на основі волоконно-оптичного гіроскопа)
FOG INS базується на ефекті Саньяка, використовуючи спіральну волоконну оптику для вимірювання обертання. Вона пропонує значно вищу стабільність, менший дрейф та кращу лінійність масштабного коефіцієнта, ніж системи MEMS, що робить її ідеальною для навігації тактичного рівня.


3. RLG INS (INS на основі кільцевого лазерного гіроскопа)
RLG INS використовує лазерну інтерференцію в резонаторі із замкнутим контуром для визначення кутової швидкості з надзвичайно високою точністю. Ця архітектура забезпечує точність стратегічного рівня та зазвичай використовується в системах, де абсолютна інерційна продуктивність є критично важливою.
| Тип INS | Переваги | Обмеження | Типові випадки використання |
|---|---|---|---|
| ІНС-механізмів |
|
| БПЛА, робототехніка, носимі системи, барражувальні боєприпаси |
| ТУМАН |
|
| Аерокосмічні платформи, оборонні транспортні засоби, морські системи |
| RLG INS |
|
| Балістичні ракети, космічні апарати, висококласні літаки |
Як працює INS?
Під час налаштування INS я завжди починаю з визначення його початкового положення, швидкості та орієнтації. Звідти система покладається виключно на інерційні вимірювання для оцінки кожного наступного стану руху в режимі реального часу.
1. Вимірювання прискорення
Система використовує тривісні акселерометри для вимірювання лінійного прискорення у трьох напрямках. Ці значення інтегруються з часом для обчислення швидкості, а потім знову інтегруються для обчислення змін положення.
2. Вимірювання кутової швидкості
Гіроскопи вимірюють кутову швидкість вздовж осей X, Y та Z. Ці показники використовуються для оновлення орієнтації системи за допомогою кватерніонного або кутового інтегрування Ейлера.
3. Принцип мертвого рахунку
INS працює за методом точного зчислення, тобто оцінює поточний стан на основі попереднього та вхідних даних датчиків. Це дозволяє йому орієнтуватися без зовнішніх орієнтирів, таких як GNSS.
4. Накопичення помилок та дрейф
Оскільки він інтегрує дані датчиків із шумом, невеликі зміщення та помилки (наприклад, нестабільність зміщення, помилка масштабного коефіцієнта) накопичуються з часом, що призводить до дрейфу як положення, так і орієнтації.
5. Об'єднання датчиків та допоміжні входи
Щоб мінімізувати дрейф, INS часто поєднують із зовнішніми датчиками, такими як GNSS, доплерівські швидкісні каротажі (DVL), барометри або магнітометри. Ці допоміжні джерела виправляють накопичені помилки та підвищують точність роботи.
Ця архітектура дозволяє INS забезпечувати автономну навігацію в режимі реального часу в середовищах, де зовнішні сигнали обмежені, перервані або повністю недоступні, наприклад, під час високої динаміки або електромагнітних перешкод.
Які показники ефективності визначають якість INS?
Під час вибору інерціальної навігаційної системи розуміння її основних параметрів продуктивності є важливим для забезпечення відповідності вимогам місії. Найбільш важливими є такі показники:
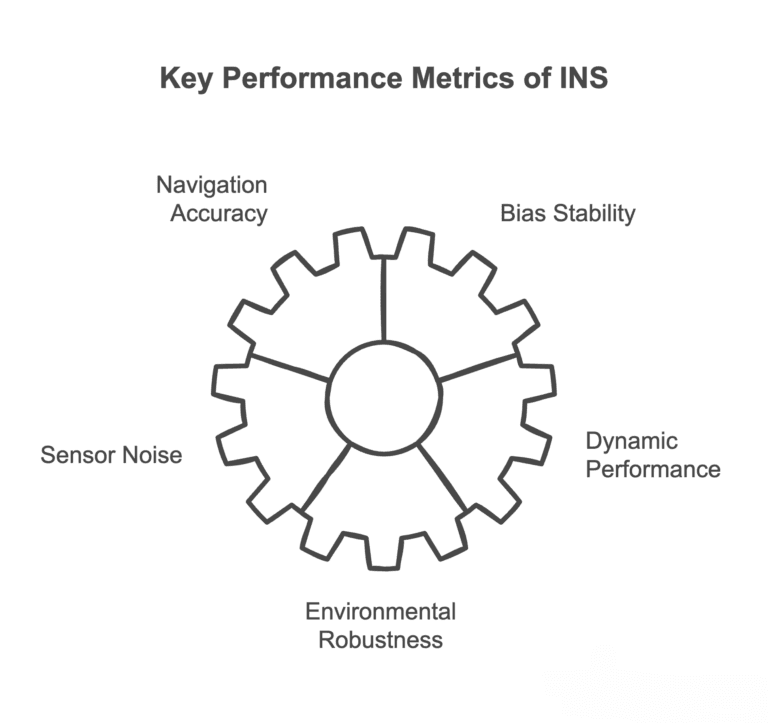
1. Точність навігації
Точність INS включає похибки положення, швидкості та орієнтації, які накопичуються з часом. Висока точність має вирішальне значення для роботи в середовищах, де немає GNSS. Наприклад, Guidenav GFS120A пропонує точність визначення курсу 0,01° (1σ) , точність крену/тангажу 0,005° (1σ) та позиціонування на рівні RTK <2 см + 1 ppm , з похибкою швидкості до 0,02 м/с .
2. Стабільність зміщення
Стабільність зміщення відображає довготривалий дрейф гіроскопів та акселерометрів, що безпосередньо впливає на довговічність навігації. Guidenav GFS120A має стабільність зміщення гіроскопа 0,003°/год та стабільність зміщення акселерометра менше 20 мкг , що робить його придатним для високоточних та тривалих автономних застосувань.
3. Шум датчика (випадкове блукання)
Випадкове блукання кількісно визначає короткочасний шум датчика. Нижчі значення ARW та VRW вказують на чистіші та стабільніші дані під час руху.
4. Динамічна продуктивність
Частота оновлення, затримка та пропускна здатність визначають, наскільки швидко INS реагує на рух. Висока динамічна продуктивність є критично важливою для БПЛА, робототехніки та ракет.
5. Стійкість до впливу навколишнього середовища
INS повинні витримувати вібрацію, удари та екстремальні температури. Відповідність стандартам MIL-STD або DO-160 забезпечує надійність у суворих умовах.
Розуміння та порівняння цих показників дозволяє інтеграторам вибрати відповідну INS для своєї платформи, збалансувавши вартість, точність та екологічні вимоги.
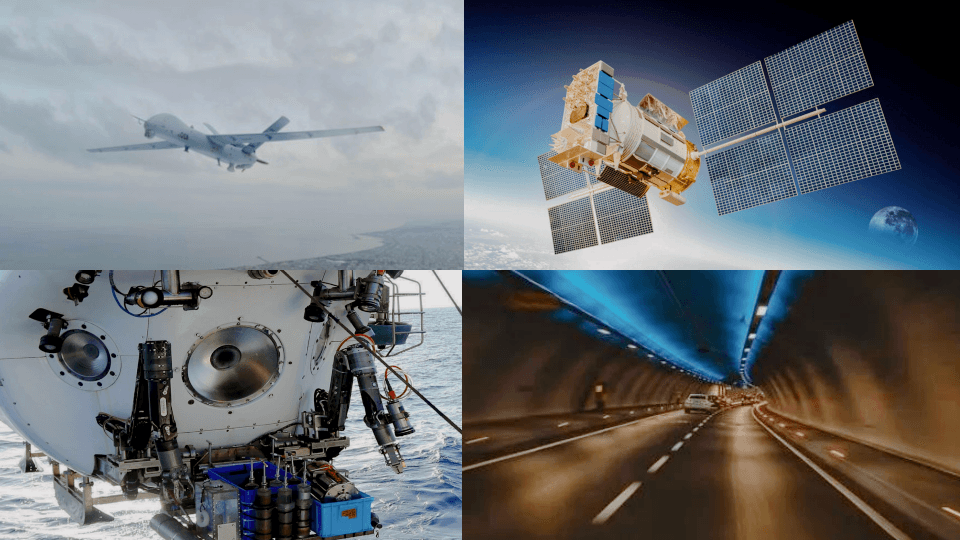
Які типові застосування INS у різних галузях промисловості?
Інерціальні навігаційні системи (ІНС) широко використовуються в аерокосмічній, морській, оборонній промисловості, безпілотних системах, промисловій автоматизації та підземних галузях, де безперервна, незалежна від сигналів навігація є критично важливою. В аерокосмічній промисловості вони забезпечують точне наведення літаків і ракет; у морських застосуваннях вони підтримують підводні човни та автономні безпілотні літальні апарати (АНПА), де ГНСС недоступна. Оборонні системи покладаються на ІНС для цілевказання, управління вогнем та навігації в середовищах, де немає GPS. Безпілотні платформи, такі як БПЛА, БПЛА наземного призначення та БПЛА, використовують ІНС для позиціонування в режимі реального часу та об'єднання даних датчиків. У промисловій робототехніці ІНС забезпечують точне керування рухом AGV та кранів. У гірничодобувній промисловості та тунелюваннях ІНС забезпечують надійне підземне позиціонування важкої техніки та бурових систем.
Як GuideNav лідирує в галузі інерціальної навігації?
Маючи понад 15 років досвіду, GuideNav пропонує високопродуктивні інерціальні навігаційні рішення, яким довіряють інтегратори оборонної, аерокосмічної та автономної галузей по всьому світу.
Різноманітні лінійки продуктів
Від компактних MEMS INS для БПЛА до високоточних FOG INS для морської та аерокосмічної галузі, GuideNav охоплює повний спектр профілів місій.
Оптимізовано для SWaP-C
Усі системи розроблені з урахуванням розміру, ваги, потужності та економічної ефективності — ідеально підходять для мобільних, вбудованих та тактичних платформ.
Готовність до гібридної інтеграції
Наші платформи INS підтримують безперебійне поєднання з GNSS, DVL та іншими допоміжними датчиками через стандартні інтерфейси (UART, CAN, Ethernet).
Міцний та перевірений у польових умовах
Розроблені відповідно до стандарту MIL-STD-810H, пристрої GuideNav є ударостійкими, вібростійкими та надійно працюють у складних умовах.
GuideNav є бажаним партнером для інтеграторів, які шукають передові інерціальні навігаційні системи (INS), що поєднують високу точність, експлуатаційну надійність та повну відповідність експортним вимогам для вимогливих оборонних, аерокосмічних та автономних застосувань.