Зміст
- Що таке ІМУ?
- Компоненти інерційного вимірювального блоку
- Як працює інерційний вимірювальний блок?
- Автономні та самокеровані транспортні засоби
- Аерокосмічна та авіаційна галузь
- Робототехніка
- Віртуальна реальність (VR) та доповнена реальність (AR)
- Медичні прилади
- Спортивна аналітика та захоплення руху
- Побутова електроніка
- MEMS IMU проти FOG IMU: ключові відмінності
- MEMS IMU: Огляд та характеристики
- FOG IMU: Огляд та характеристики
- Показники ефективності IMU
- Методи калібрування ІМУ
- Переваги інерціальних вимірювальних блоків
- Обмеження інерціальних вимірювальних одиниць
- IMU проти AHRS (системи відліку положення та курсу)
- IMU проти INS (інерціальна навігаційна система)
- Різні типи інерційних блоків (ІМУ) та огляд їхнього ринку
- Майбутні тенденції та розвиток інерційного вимірювального блоку
Вступ
Інерціальні вимірювальні блоки (ІВБ) є надзвичайно важливими в сучасних високотехнологічних галузях, включаючи автономні транспортні засоби, робототехніку та аерокосмічну галузь. Однак, незважаючи на їх широке використання, багато хто все ще намагається повністю зрозуміти, як працюють ІВБ та який їхній потенціал. Без цього розуміння існує ризик неефективності та помилок у роботі системи. У цій статті ми розглянемо основи ІВБ, їх застосування та майбутні тенденції, щоб ви отримали максимальну віддачу від цієї технології.
Інерціальний вимірювальний блок (ІВБ) – це пристрій, який вимірює прискорення, кутову швидкість, а іноді й магнітні поля для визначення орієнтації та положення об'єкта. ІВБ є важливими в навігації, системах керування та відстеженні руху. Поєднуючи дані датчиків, ІВБ дозволяють точно відстежувати рух та орієнтацію в середовищах, де сигнали GPS можуть бути слабкими або недоступними.
Майбутнє інерційних модулів (ІМУ) захопливе, адже такі тенденції, як об'єднання датчиків та інтеграція штучного інтелекту, відкривають нові можливості. Давайте заглибимося в те, як працюють ці системи та яка їхня роль у передових технологіях чекає в майбутньому.
Основи інерційного вимірювального блоку (IMU)
Компоненти інерційного вимірювального блоку
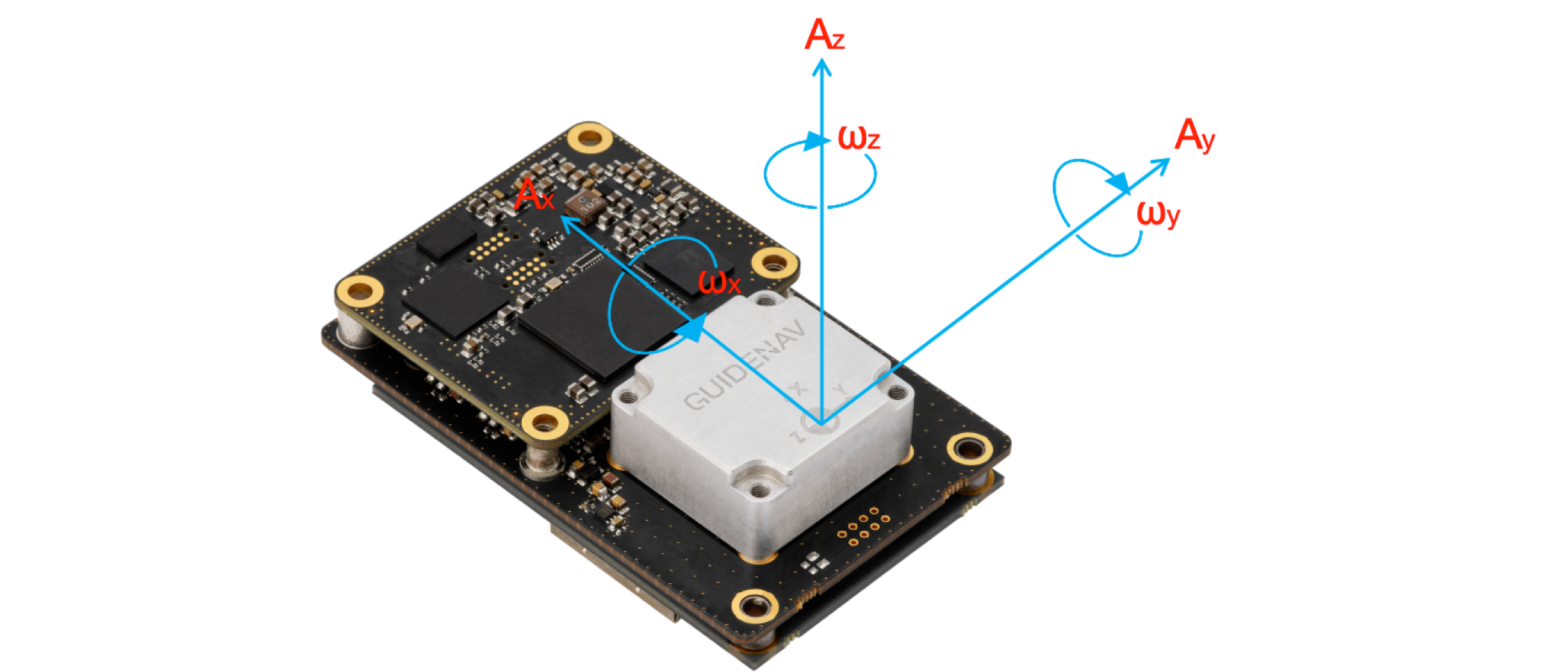
Інерційний модуль (IMU) зазвичай містить такі ключові датчики. Давайте розглянемо їх та подивимося, як кожен з них сприяє загальній функціональності:
| Компонент | Функція | Вихід |
|---|---|---|
| Акселерометр | Вимірює лінійне прискорення вздовж осей X, Y та Z. | Надає дані про швидкість та переміщення. |
| Гіроскоп | Вимірює кутову швидкість (швидкість обертання) навколо осей X, Y та Z. | Надає дані про орієнтацію (ставлення). |
| Магнітометр (необов'язково) | Вимірює напруженість та напрямок магнітного поля відносно магнітного поля Землі. | Забезпечує напрямок (напрямок за компасом). |
Кожен із цих датчиків відіграє вирішальну роль у наданні даних про рух у режимі реального часу, допомагаючи нам зрозуміти, як об'єкт рухається та обертається в просторі.
Як працює інерційний вимірювальний блок?
Ось як ми, в GuideNav , проектуємо IMU для безперебійної роботи:
- Вимірювання прискорення : Акселерометр виявляє зміни швидкості вздовж трьох осей. Ці дані дозволяють нам визначити, наскільки швидко об'єкт прискорюється або сповільнюється, що є критично важливим для відстеження переміщення з часом.
- Вимірювання кутової швидкості : гіроскоп відстежує, наскільки об'єкт обертається навколо кожної з трьох осей. Інтегруючи ці дані обертання з часом, IMU може повідомити нам точну орієнтацію об'єкта в просторі.
- Вимірювання магнітного поля (додатково) магнітометр включено, він вимірює магнітне поле Землі, забезпечуючи курс компаса. Це допомагає виправити будь-який дрейф показань гіроскопа, забезпечуючи точність IMU протягом тривалого часу.
У GuideNav ми використовуємо алгоритми об'єднання даних датчиків для об'єднання даних з цих компонентів. Таким чином, ми створюємо високоточне представлення положення та орієнтації об'єкта у 3D-просторі.
Застосування інерційних вимірювальних одиниць (IMU)
Інерціальні вимірювальні блоки (ІВБ) використовуються в широкому спектрі застосувань, надаючи важливі дані про прискорення, кутову швидкість та іноді магнітні поля. Їхня точність та універсальність роблять їх вирішальними в таких галузях, як автономні транспортні засоби, аерокосмічна промисловість, робототехніка, віртуальна реальність, охорона здоров'я, спортивна аналітика та побутова електроніка. Нижче ми розглянемо деякі ключові застосування, де ІВБ незамінні.
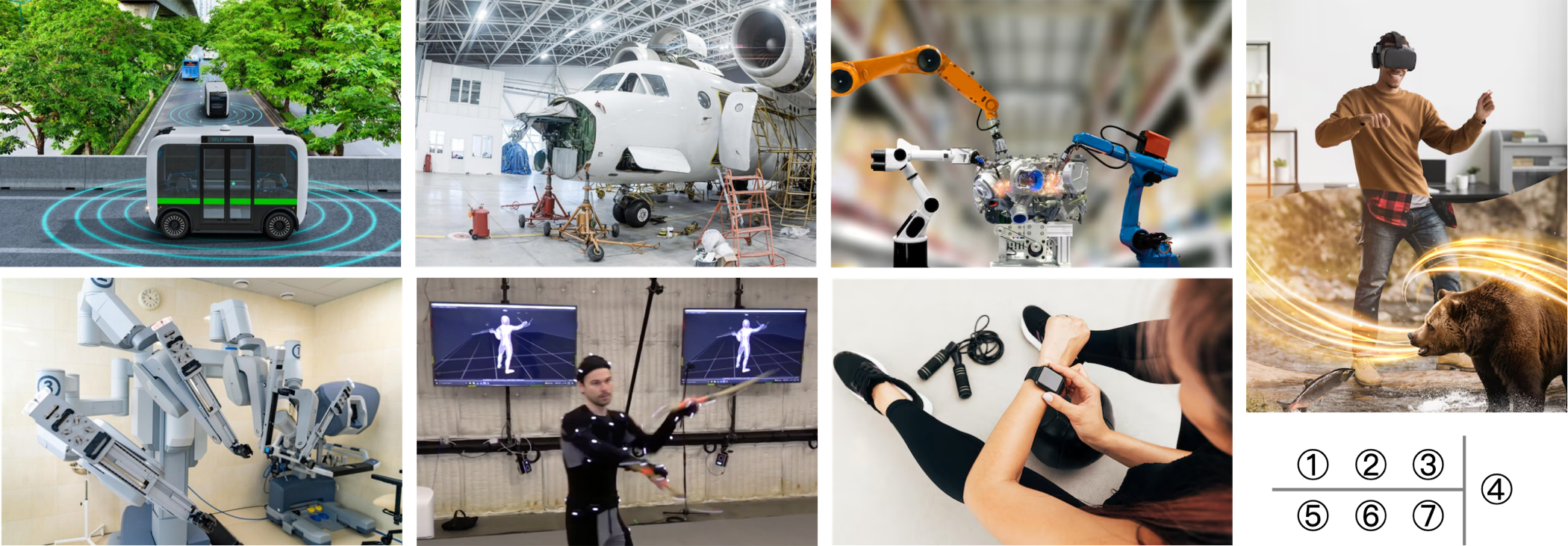
1. Автономні та самокеровані транспортні засоби
Інерційні модулі (IMU) мають вирішальне значення для розробки та експлуатації автономних транспортних засобів . Вони допомагають відстежувати рух та орієнтацію транспортного засобу в режимі реального часу, забезпечуючи стабільність та точну навігацію. Хоча глобальної системи позиціонування (GPS) часто використовуються для позиціонування, IMU є важливими, коли сигнали GPS слабкі або недоступні (наприклад, у тунелях, міських каньйонах або віддалених районах).
| Застосування | Роль ІДУ |
|---|---|
| Автономні автомобілі | Надає дані про орієнтацію та рух транспортного засобу для забезпечення стабільної навігації. |
| Дрони | Забезпечує точний контроль траєкторії польоту та положення. |
| Роботизовані транспортні засоби | Відстежує рух по бездоріжжю або в умовах відсутності GPS. |
2. Аерокосмічна галузь та авіація
Інерційні модулі (IMU) вже давно є невід'ємною частиною аерокосмічної та авіаційної промисловості. Вони надають дані про орієнтацію та рух літаків і космічних апаратів у режимі реального часу. IMU використовуються як у комерційній авіації , так і в космічних дослідженнях , забезпечуючи високу надійність і точність у складних умовах, де GPS може бути недоступним або непрактичним.
| Застосування | Роль ІДУ |
|---|---|
| Навігація літака | Надає дані про положення (орієнтацію) для стабільного польоту. |
| Навігація космічних апаратів | Забезпечує точну орієнтацію та контроль руху в просторі. |
| Орієнтація супутника | Зберігає орієнтацію та траєкторію супутника під час роботи. |
3. Робототехніка
У робототехніці інерційні блоки (IMU) використовуються для контролю руху, орієнтації та балансу роботів, будь то в промислових, медичних чи споживчих застосуваннях. IMU забезпечують зворотний зв'язок із системами керування роботами, забезпечуючи плавний та точний рух у різних середовищах.
| Застосування | Роль ІДУ |
|---|---|
| Промислові роботи | Забезпечує стабільний рух під час виробничих завдань. |
| Медичні роботи | Забезпечує точний контроль рухів під час операцій та реабілітації. |
| Автономні роботи | Відстежує положення та орієнтацію для навігації в динамічних середовищах. |
4. Віртуальна реальність (VR) та доповнена реальність (AR)
У світі віртуальної реальності (VR) та доповненої реальності (AR) IMU є ключовими компонентами для відстеження рухів голови та тіла користувачів. Вимірюючи обертання, прискорення та іноді магнітні поля, IMU надають дані про рух у режимі реального часу, що покращує враження від занурення.
| Застосування | Роль ІДУ |
|---|---|
| Гарнітури віртуальної реальності | Відстежує рухи голови для налаштування віртуального середовища. |
| Пристрої доповненої реальності | Відстежує рухи рук для взаємодії з віртуальними об'єктами. |
| Керування жестами | Розпізнає жести користувача для взаємодії в системах AR/VR. |
5. Медичні вироби
ІМУ все частіше інтегруються в медичні пристрої для різних цілей, включаючи відстеження рухів, реабілітацію та діагностику. Їхня здатність вимірювати точні рухи робить їх безцінними для розуміння та моніторингу прогресу пацієнтів.
| Застосування | Роль ІДУ |
|---|---|
| Фізична реабілітація | Контролює рухи пацієнтів під час терапії, щоб відстежувати прогрес. |
| Носимі пристрої | Відстежує рухові розлади, наприклад, у пацієнтів із хворобою Паркінсона. |
| Захоплення руху для діагностики | Вимірює аномальні рухи для діагностичних цілей. |
6. Спортивна аналітика та захоплення руху
IMU широко використовуються в спортивній аналітиці та захопленні руху для моніторингу результатів спортсменів та оптимізації їхніх рухів. Точне відстеження руху, яке забезпечують IMU, допомагає у запобіганні травмам, аналізі та покращенні результатів.
| Застосування | Роль ІДУ |
|---|---|
| Виступи спортсмена | Відстежує дані руху для аналізу швидкості, прискорення та ефективності. |
| Профілактика травм | Відстежує рухи для виявлення ризиків та оптимізації навчання. |
| Захоплення руху | Записує рухи людини для використання у фільмах, анімації та іграх. |
7. Побутова електроніка
IMU також вбудовані в багато споживчих електронічних виробів, таких як смартфони, портативні пристрої та ігрові контролери. Ці пристрої використовують IMU для виявлення руху та орієнтації, що забезпечує роботу різних функцій та покращує взаємодію з користувачем.
| Застосування | Роль ІДУ |
|---|---|
| Смартфони | Дозволяє обертати екран, керувати за допомогою рухів та відстежувати активність. |
| Фітнес-трекери | Відстежує кількість кроків, відстань та фізичну активність. |
| Ігрові контролери | Відстежує рухи гравця для захопливого ігрового досвіду. |
Типи інерційних вимірювальних блоків (IMU): MEMS IMU проти FOG IMU
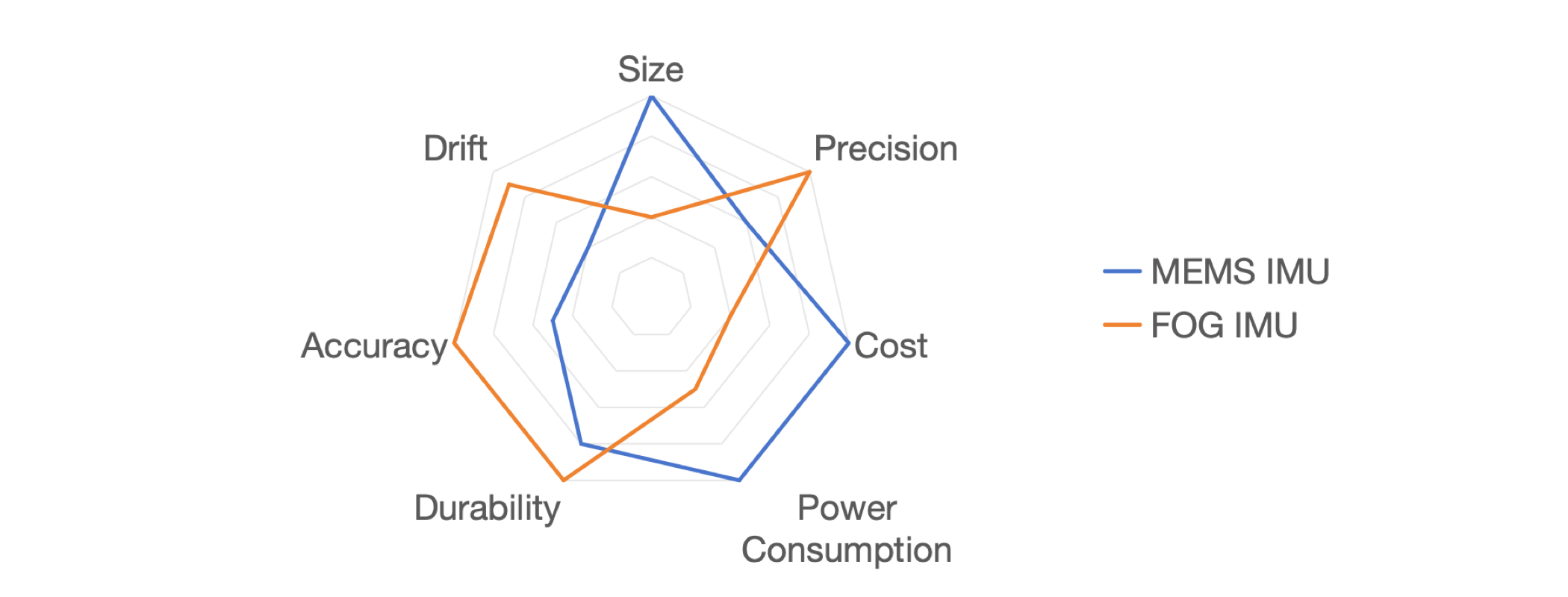
Інерціальні вимірювальні блоки (ІВБ) є важливими в багатьох галузях промисловості, особливо в оборонній та аерокосмічній галузях, де висока точність є критично важливою. Два основні типи ІВБ, MEMS ІВБ (мікроелектромеханічні системи) та FOG ІВБ (волоконно-оптичні гіроскопічні ІВБ) , суттєво відрізняються за продуктивністю, розміром, вартістю та придатністю для різних застосувань.
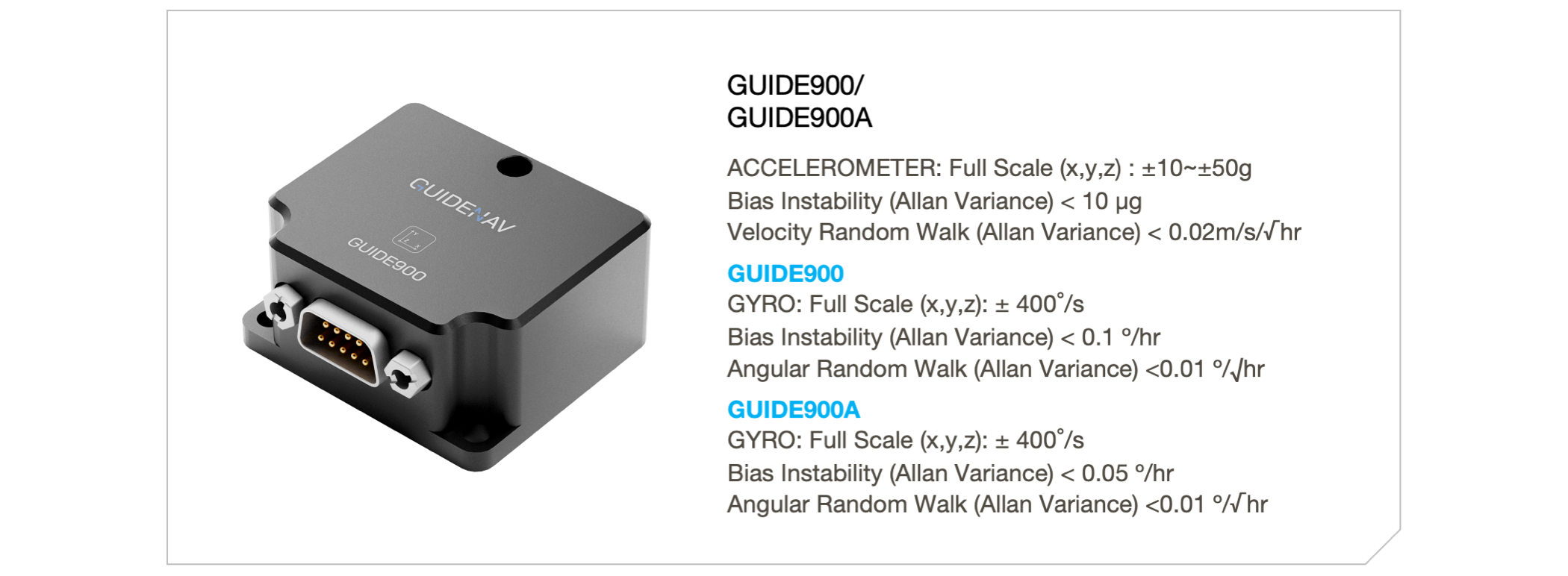
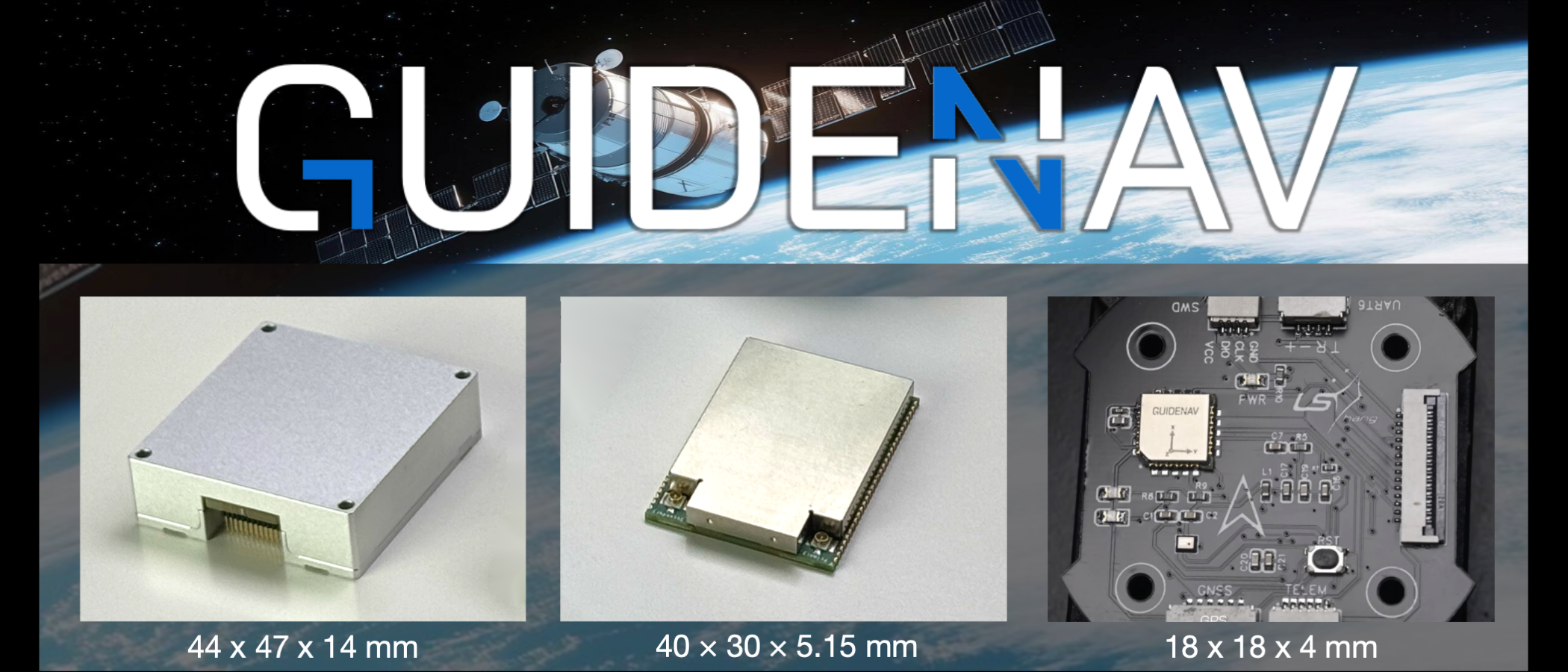
Хоча інерційні модулі волонтера (ІМУ) традиційно використовувалися у високоточних галузях, таких як аерокосмічна галузь, оборона та робототехніка, останні досягнення в галузі ІМУ MEMS , такі як GUIDE900 та GUIDE900A , тепер пропонують рівні точності 0,1°/год та 0,05°/год , що можна порівняти з ІМУ початкового рівня на основі ІМУ волонтера . Це вдосконалення дозволяє використовувати ІМУ MEMS високоточних застосуваннях , де раніше домінували ІМУ волонтера .
MEMS IMU проти FOG IMU: ключові відмінності
| Параметр | ІМУ МЕМС | ІМУ ВОГ |
|---|---|---|
| Технології | На основі датчиків мікроелектромеханічних систем (MEMS) | Використовує волоконно-оптичні гіроскопи (ВОГ) для вимірювання кутової швидкості. |
| Розмір | Компактний та легкий , ідеально підходить для портативних пристроїв. | Більший, міцніший, підходить для прецизійного застосування у великомасштабних системах. |
| Точність | Помірна точність, але новіші високоточні MEMS IMU можуть досягати 0,1°/год або 0,05°/год . | Надзвичайно висока точність, мінімальний дрейф та більша стабільність з часом. |
| Вартість | Низька вартість, що робить їх ідеальними для масового ринку. | Вища вартість через передові технології, що використовуються у високоякісних системах. |
| Споживання енергії | Низьке енергоспоживання , підходить для пристроїв з живленням від батарейок. | Вища споживана потужність, краще підходить для систем з більшим енергетичним бюджетом. |
| Довговічність | Менш стійкий до екстремальних умов навколишнього середовища. | Дуже міцний, здатний витримувати суворі умови експлуатації. |
| Точність | Підходить для застосувань з низькою та середньою точністю. | Висока точність, підходить для високоточної навігації та стабільності. |
| Застосування | Побутова електроніка, автомобільні системи, дрони, безпілотні літальні апарати, **військові системи**. | Аерокосмічна, оборонна, промислова робототехніка, високоякісні навігаційні системи. |
| Дрейф | Більший дрейф з часом, що вимагає повторного калібрування. | Дуже низький дрейф, ідеально підходить для тривалої роботи без повторного калібрування. |
| Час відгуку | Швидша реакція завдяки меншому розміру та простішій конструкції. | Трохи повільніша реакція, але забезпечує вищу стабільність з часом. |
MEMS IMU: Огляд та характеристики
Інерційні вимірювальні блоки MEMS використовують мікроелектромеханічних систем (MEMS) , де невеликі механічні компоненти інтегровані з електронікою на мікрочіпі. Основними перевагами MEMS IMU є їхній малий розмір , низька вартість та низьке енергоспоживання . Ці характеристики роблять MEMS IMU ідеальними для застосування в побутовій електроніці, автомобільних системах і все частіше у військових цілях .
У GuideNav ми особливо пишаємося нашими високоточними MEMS-імпульсними пристроями (IMU), такими як GUIDE900 та GUIDE900A , які забезпечують точність 0,1°/год та 0,05°/год відповідно, що робить їх придатними для деяких високоточних застосувань, у яких традиційно домінували FOG-імпульсні пристрої .
Основні характеристики MEMS IMU:
- Малий розмір : ідеально підходить для компактних застосувань, таких як смартфони , носимі пристрої та військові дрони .
- Низька вартість : ідеально підходить для застосувань з великими обсягами виробництва, таких як автомобільні системи , побутова електроніка та оборонні системи , яким потрібно поєднувати продуктивність та доступність.
- Помірна точність : Хоча MEMS IMU традиційно пропонують нижчу точність, ніж FOG IMU , високоточні моделі зараз долають цей розрив для багатьох оборонних застосувань.
- Низьке енергоспоживання : Висока ефективність для пристроїв, що працюють від батарейок, що має вирішальне значення для військових безпілотників , інтелектуальних систем зброї та інших мобільних оборонних технологій.
Застосування MEMS IMU:
- Оборона : використовується у військових безпілотниках , навігаційних системах для бронетехніки та системах наведення ракет . Ці застосування виграють від компактності та низької вартості інерційних модулів MEMS
- Побутова електроніка : зустрічається у смартфонах , фітнес-трекерах та ігрових контролерах .
- Автомобільні системи : використовуються в системах контролю стійкості транспортних засобів та автономної навігації .
- Дрони та безпілотні літальні апарати : забезпечення орієнтації та стабілізації військових безпілотників та споживчих безпілотних літальних апаратів .
FOG IMU: Огляд та характеристики
В інерційних модулях використовуються волоконно-оптичні гіроскопи (ВОГ) , що дозволяє їм забезпечувати надзвичайно високу точність і стабільність. Це робить ВОГО ІМУ ідеальними для застосувань, що вимагають мінімального дрейфу та довгострокової надійності, таких як аерокосмічна навігація , наведення ракет та високоякісна робототехніка .
Хоча інерційні модулі FOG (інерційні модулі з вільним випромінюванням) широко цінуються за свою точність та довговічність, інерційні модулі MEMS скорочують розрив у продуктивності, особливо у військових застосуваннях , де ключовими факторами є вартість, розмір та споживання енергії.
Основні характеристики інерційних модулів FOG:
- Висока точність : ІМУ з вогнестійким полем забезпечують надзвичайно низький дрейф, що робить їх ідеальними для високоточних застосувань, таких як супутникова навігація та військові системи наведення.
- Довговічність : Завдяки здатності працювати в екстремальних умовах навколишнього середовища, інерційні модулі FOG ідеально підходять для аерокосмічних та військових систем , яким необхідно працювати в суворих умовах.
- Вище енергоспоживання : ІМУ з вогнестійким елементом живлення (ВОГ) зазвичай споживають більше енергії, що робить їх кращими для систем з достатніми енергетичними ресурсами.
- Більший розмір : ІМУ FOG є громіздкішими порівняно з ІМУ MEMS , тому вони використовуються у більших системах, таких як літаки та космічні кораблі .
Застосування інерційних модулів FOG:
- Аерокосмічна галузь : використовується в літаках та супутниковій навігації , де висока точність і стабільність є критично важливими.
- Оборона : Широко використовується в системах наведення ракет , безпілотних військових транспортних засобах та військових навігаційних системах .
- Високоякісна робототехніка : використовується в промисловій робототехніці , хірургічних роботах та автономних навігаційних системах , де необхідні точність та довготривала стабільність.
Коли обрати MEMS IMU проти FOG IMU
| Випадок використання | ІМУ МЕМС | ІМУ ВОГ |
|---|---|---|
| Побутова електроніка | Ідеально підходить для смартфонів, носимих пристроїв та фітнес-трекерів. | Не підходить через високу вартість та енергоспоживання. |
| Аерокосмічна та авіаційна галузь | Підходить для недорогих, невеликих систем з помірними вимогами до точності. | Незамінний для високоточних систем навігації та орієнтації. |
| Автономні транспортні засоби | Добре підходить для недорогих рішень з помірними вимогами до продуктивності. | Необхідно для високоточної навігації в складних умовах. |
| Військова справа та оборона | Використовується у **військових безпілотниках**, **навігаційних системах** для **транспортних засобів** та **системах наведення ракет**. | Широко використовується для наведення ракет, безпілотних літальних апаратів та навігації в складних умовах. |
| Робототехніка | Підходить для роботів споживчого класу або освітніх проектів. | Бажано використовувати для промислових роботів, хірургічних роботів та інших прецизійних систем. |
Продуктивність та калібрування інерційного вимірювального блоку (IMU)
На продуктивність інерціальних вимірювальних блоків (ІВБ) можуть впливати різні фактори, такі як дрейф датчика, температура та умови навколишнього середовища. Для забезпечення оптимальної продуктивності важливо розуміти ключові показники ефективності (КПЕ) ІВБ та методи калібрування, що використовуються для підвищення їхньої точності.
Показники ефективності IMU
Продуктивність інерціального вимірювального блоку (ІВБ) оцінюється на основі кількох ключових факторів, які безпосередньо впливають на його точність та надійність. Нижче наведено найважливіші показники продуктивності ІВБ:
| Показник ефективності | Опис |
|---|---|
| Стабільність зміщення | Стабільність показань IMU з часом. Стабільний IMU матиме мінімальні відхилення у вимірюваннях. |
| Коефіцієнт масштабування | Співвідношення між фактичним фізичним рухом та результатом роботи IMU. Будь-які помилки в цьому співвідношенні можуть призвести до неправильної інтерпретації даних. |
| Шум | Випадкові коливання показань датчиків IMU. Низький рівень шуму вказує на вищу точність вимірювань. |
| Випадкова прогулянка | Описує дрейф вимірювань з часом. Він вказує на те, наскільки вимірювання відхиляється від свого істинного значення через випадковий шум. |
| Роздільна здатність | Найменша вимірювана зміна в показаннях датчика IMU. Вища роздільна здатність підвищує точність вимірювань. |
| Нелінійність | Відхилення від прямолінійної залежності між вхідними та вихідними даними. Нелінійності можуть спричиняти помилки при вищих прискореннях або кутових швидкостях. |
| Температурна чутливість | Зміна вимірювань IMU через зміни температури навколишнього середовища. IMU з низькою температурною чутливістю є точнішими за умов коливань навколишнього середовища. |
Методи калібрування ІМУ
Калібрування – це життєво важливий процес, який допомагає підвищити точність інерціального вимірювального блоку (IMU), виправляючи помилки, що можуть виникати через дрейф датчика, нерівність вирівнювання та інші фактори. Калібрування IMU зазвичай включає три основні сенсорні системи: акселерометр , гіроскоп і магнітометр . Кожен з цих датчиків вимагає специфічних методів калібрування для забезпечення точних і надійних вимірювань.
1. Калібрування акселерометра
Акселерометр , таким як відхилення масштабного коефіцієнта, перекоси та неортогональність осей.
| Метод калібрування | Опис |
|---|---|
| Статичне калібрування | Поширений метод, коли IMU розміщується у відомій орієнтації (наприклад, плоско на поверхні). Вимірюючи прискорення вільного падіння (9,81 м/с²), можна виправити помилки датчика. |
| Динамічне калібрування | Включає переміщення IMU з різними відомими прискореннями та напрямками для корекції помилок масштабного коефіцієнта, зміщення та неспіввідношення між осями. |
| Компенсація температури | Оскільки акселерометри чутливі до температури, калібрування також включає компенсацію коливань температури, які можуть спричинити похибки вимірювання. |

2. Калібрування гіроскопа
Гіроскоп вимірює кутову швидкість навколо осей X, Y та Z інерційного модуля (IMU). Гіроскопи можуть страждати від дрейфу ( коли показання датчика повільно змінюються з часом) та нестабільності зміщення (коли у вимірюваннях є постійне зміщення).
| Метод калібрування | Опис |
|---|---|
| Калібрування зміщення нульової швидкості | У цьому методі гіроскоп розміщується у стаціонарному положенні (без руху), а зміщення або упередження вимірюється та коригується. |
| Калібрування таблиці швидкостей | Це включає обертання IMU з різними відомими кутовими швидкостями для визначення будь-якої нелінійності або помилок масштабного коефіцієнта. |
| Калібрування температури | Подібно до акселерометрів, гіроскопи чутливі до змін температури. Калібрування враховує зміни в поведінці датчика за різних температур. |
Калібрування гіроскопа забезпечує точність показань кутової швидкості IMU та відсутність дрейфу, покращуючи його продуктивність у динамічних умовах.
3. Калібрування магнітометра
Магнітометр вимірює силу та напрямок магнітного поля Землі, надаючи дані про орієнтацію, які використовуються для визначення курсу. На магнітометри можуть впливати локальні магнітні збурення, зміщення датчиків та помилки масштабного коефіцієнта .
| Метод калібрування | Опис |
|---|---|
| Калібрування твердого заліза | Цей метод компенсує спотворення магнітного поля, спричинені власними компонентами IMU (наприклад, електронними пристроями). |
| Калібрування м'якого заліза | Виправляє спотворення, спричинені навколишнім середовищем або матеріалами поблизу інерційного модуля (ІМУ). |
| Багатоточкове калібрування | Магнітометр піддається впливу різноманітних відомих величин сили та напрямків магнітного поля для виявлення та виправлення помилок. |
Калібрування магнітометра є важливим для отримання точних даних про курс та орієнтацію, особливо коли IMU використовується в середовищах зі змінними магнітними умовами.
Переваги та обмеження інерціальних вимірювальних блоків (ІВБ)
Інерціальні вимірювальні пристрої пропонують виняткову продуктивність у режимі реального часу, незалежність від зовнішніх систем та високу адаптивність до різних галузей промисловості. Однак, вибираючи правильну технологію, необхідно враховувати дрейф , чутливість до навколишнього середовища та високу вартість прецизійних моделей MEMS IMU забезпечують баланс між вартістю та продуктивністю для багатьох споживчих та промислових застосувань, тоді як FOG IMU є найкращим вибором для високоточних , тривалих завдань в аерокосмічній та оборонній галузях. Розуміння сильних та обмежених можливостей IMU допоможе вам вибрати найкращу систему для ваших конкретних потреб.
Переваги інерціальних вимірювальних блоків
| Перевага | Опис |
|---|---|
| Висока точність у динамічних середовищах | Інерційні модулі (IMU) забезпечують прискорення та кутової швидкості в режимі реального часу автономних транспортних засобах , аерокосмічній галузі та робототехніці , де GPS або інші зовнішні джерела сигналу недоступні. |
| Незалежність від зовнішніх сигналів | Інерційні модулі (IMU) працюють без використання зовнішніх сигналів, таких як GPS , що робить їх дуже надійними в таких середовищах, як підземна навігація , дослідження космосу або робототехніка в приміщенні . |
| Компактний та легкий | MEMS-імпульсні модулі (IMU) невеликі та легкі, ідеально підходять для таких застосувань, як носимна електроніка , дрони та побутова електроніка , де простір та вага мають вирішальне значення. |
| Низьке енергоспоживання | MEMS-імпульсні модулі є енергоефективними, ідеально підходять для пристроїв з живленням від батарей, таких як смарт-годинники та фітнес-трекери , які потребують тривалої роботи. |
| Обробка даних у реальному часі | IMU передають високочастотні дані з низькою затримкою, що робить їх придатними для керування в режимі реального часу в робототехніці , стабілізації дронів та навігації транспортних засобів . |
| Довговічність у суворих умовах | ІМУ FOG та деякі високоякісні ІМУ MEMS можуть витримувати екстремальні умови, такі як висока вібрація , перепади температури та удари , що робить їх ідеальними для військового та аерокосмічного застосування. |
Обмеження інерціальних вимірювальних одиниць
| Обмеження | Опис |
|---|---|
| Дрейф з часом | Гіроскопи в інерційних блоках (ІМУ) з часом дрейф неточних вимірювань, якщо їх регулярно не калібрувати. Це є суттєвою проблемою в умовах тривалого використання. |
| Чутливість до навколишнього середовища | Інерційні модулі (ІМУ) чутливі до умов навколишнього середовища, таких як температура та вібрації , що може призвести до помилок, особливо в ІМУ MEMS , які більш схильні до цих перешкод. |
| Висока вартість (для високоточних моделей) | Хоча MEMS IMU є економічно ефективними, високоточні IMU, такі як FOG IMU, є дорогими та можуть не підходити для всіх застосувань через їхню високу вартість та енергоспоживання. |
| Короткострокова точність проти довгострокової стабільності | Інерційні модулі (IMU) пропонують високу короткочасну точність , але без зовнішньої корекції (наприклад, GPS ) вони зазнають довготривалої нестабільності , що є проблемою для високоточних навігаційних завдань протягом тривалого часу. |
| Складність об'єднання даних | Інерційні модулі (IMU) часто потребують об'єднання датчиків (наприклад, інтеграції GPS , магнітометрів ) для виправлення помилок з часом, що додає складності та обчислювального навантаження на систему. |
| Обмежена точність у високодинамічних умовах | У високодинамічних застосуваннях , MEMS IMU можуть не відповідати точності IMU FOG , особливо в таких застосуваннях, як наведення ракет або орієнтація космічних апаратів , які потребують надвисокої точності. |
Інерціальний вимірювальний блок (IMU) проти інших інерціальних систем: IMU проти AHRS, IMU проти INS
Інерціальні вимірювальні блоки (IMU) є важливими в багатьох високотехнологічних застосуваннях, але вони не є єдиними системами, доступними для вимірювання руху, орієнтації та навігації. Системи визначення положення та курсу (AHRS) та інерціальні навігаційні системи (INS) – це дві інші поширені системи, які також спираються на інерціальні датчики. Хоча IMU надають основні дані як для AHRS, так і для INS, ці системи пропонують додаткові можливості та розроблені для конкретних випадків використання. Давайте розглянемо, як IMU порівнюються з AHRS та INS .
IMU проти AHRS (системи відліку положення та курсу)
IMU та AHRS використовуються для орієнтації та відстеження руху, але вони відрізняються додатковими функціями та відповідними варіантами використання.
| Параметр | ІМУ | AHRS |
|---|---|---|
| Визначення | **Інерційний вимірювальний блок (IMU)** вимірює прискорення та кутову швидкість, надаючи необроблені дані про рух. | **Система визначення положення та курсу (AHRS)** поєднує **дані IMU** з додатковими датчиками (наприклад, магнітометрами) для отримання даних про орієнтацію та курс. |
| Компоненти | Зазвичай включає **акселерометри** та **гіроскопи**, іноді **магнітометри**. | Використовує **дані IMU** (акселерометри та гіроскопи) плюс **магнітометри** та іноді інші датчики (наприклад, **GPS**, **барометри**). |
| Вихід | Надає дані про необроблені прискорення та кутову швидкість. | Виводить орієнтацію (положення) та напрямок (напрямок за компасом) у глобальній системі відліку (наприклад, північ, схід, низ). |
| Точність | Інерційні модулі (IMU) забезпечують точне відстеження руху, але з часом можуть страждати від **дрейфу** через помилки датчиків. | AHRS підвищує точність, використовуючи зовнішні опорні точки (магнітометри, GPS), зменшуючи дрейф з часом. |
| Складність | Простіший у конструкції та експлуатації, зазвичай для базового відстеження руху. | Більш складний через додаткові |
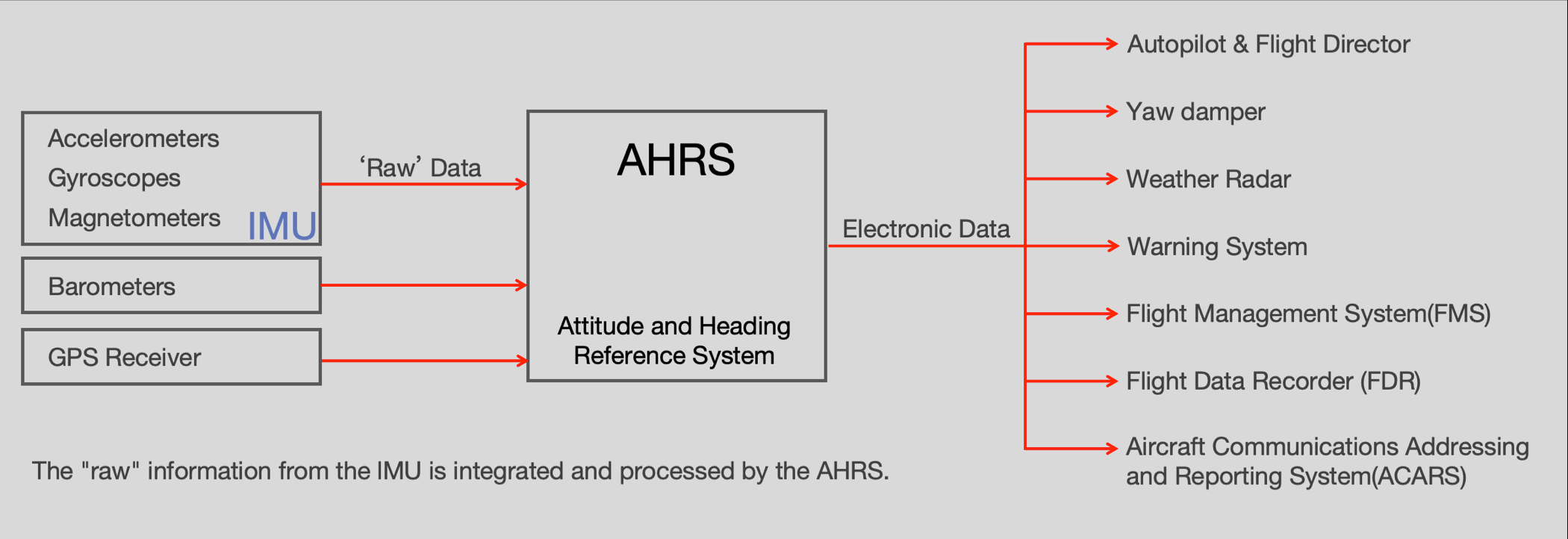
Ключова різниця : IMU надають необроблені дані датчиків, тоді як AHRS об'єднує ці дані з іншими датчиками (наприклад, магнітометрами) для забезпечення точної орієнтації та курсу. AHRS зазвичай використовується, коли потрібна точна інформація про положення та курс.
IMU проти INS (інерціальна навігаційна система)
Інерціальна навігаційна система (INS) — це більш просунута система, яка інтегрує IMU з додатковими можливостями обробки, часто використовуючи алгоритми , як фільтрація Калмана, для обчислення положення, швидкості та орієнтації об'єкта.
| Параметр | ІМУ | ІНС |
|---|---|---|
| Визначення | **Інерційний вимірювальний блок (IMU)** вимірює прискорення та кутову швидкість, надаючи необроблені дані про рух. | **Інерціальна навігаційна система (INS)** поєднує **IMU** з обчислювальною обробкою (наприклад, фільтром Калмана) для відстеження положення, швидкості та орієнтації. |
| Компоненти | Включає **акселерометри** та **гіроскопи**; іноді **магнітометри**. | Поєднує **IMU**, **алгоритми** для об'єднання датчиків, а іноді й інші датчики (наприклад, **GPS**). |
| Вихід | Надає дані про прискорення та кутову швидкість. | Виводить **положення**, **швидкість** та **орієнтацію**, пропонуючи повні навігаційні дані. |
| Точність | ІМУ мають обмежену точність з плином часу через дрейф. | **INS** з часом покращує точність, поєднуючи дані IMU з алгоритмами, а іноді й зовнішніми корекціями (наприклад, GPS). |
| Складність | Простий, надає лише дані про рух. | Складність через об'єднання даних, обробку датчиками та необхідність обчислювальних алгоритмів. |
| Застосування | Використовується для базового відстеження руху, наприклад, у дронах, автомобілях та робототехніці. | Використовується для **навігації** в **літаках**, **підводних човнах**, **космічних кораблях** та **військових застосуваннях**, де довгострокове відстеження місцезнаходження є критично важливим. |
Ключова різниця : Хоча IMU вимірюють рух та орієнтацію, INS використовує ці дані разом з алгоритмами для розрахунку положення , швидкості та орієнтації з плином часу, забезпечуючи повноцінне навігаційне рішення.
Ринок інерційних вимірювальних одиниць та майбутній розвиток: типи, перспективи ринку та тенденції
Інерціальні вимірювальні блоки (ІВБ) є невід'ємною частиною сучасних систем навігації, відстеження руху та контролю стійкості в різних галузях промисловості. Зростаючий попит на автономні системи , робототехніку , аерокосмічну промисловість та побутову електроніку стимулював еволюцію технологій ІВБ, збільшуючи їхнє впровадження в усьому світі. Оскільки ринок ІВБ продовжує розширюватися, важливо розуміти різні типи ІВБ, їхні поточні ринкові умови та тенденції, що формують їхній майбутній розвиток.
Різні типи інерційних блоків (ІМУ) та огляд їхнього ринку
ІМУ бувають різних форм, кожна з яких відповідає різним вимогам до точності, розміру, вартості та продуктивності. Найпоширенішими типами ІМУ є MEMS-ІМУ , FOG-ІМУ та RLG-ІМУ (ІМУ кільцевого лазерного гіроскопа) . Кожен з них має свої унікальні характеристики, що робить його придатним для конкретних застосувань. Давайте розглянемо ці типи та їхні поточні ринкові сценарії.
1. ІМУ MEMS
MEMS-імпульсні блоки (IMU) є найбільш широко використовуваними завдяки своїм компактним розмірам , низькій вартості та низькому енергоспоживанню . Ці IMU використовують датчики мікроелектромеханічних систем (MEMS) для вимірювання прискорення та кутової швидкості. MEMS-імпульсні блоки дуже підходять для побутової електроніки, автомобільних застосувань та недорогих систем.
| Характеристика | ІМУ МЕМС |
|---|---|
| Розмір | Компактний , маленький та легкий. |
| Вартість | Низька вартість, що робить їх доступними для масового впровадження. |
| Точність | Помірна точність, хоча новіші моделі досягають вищої точності (наприклад, **0,1°/год**). |
| Застосування | Використовується у **споживчій електроніці**, **автомобільних системах**, **дронах**, **робототехніки** та **носимих пристроях**. |
| Зростання ринку | Значне зростання, зумовлене **смартфонами**, **безпекою автомобілів**, **технологіями дронів** та **пристроями Інтернету речей**. |
Перспективи ринку для MEMS IMU:
ринок MEMS-імпульсних пристроїв (IMU) продовжуватиме зростати завдяки їхній доступності та універсальності. Ці IMU все частіше використовуються в смартфонах , носимих пристроях , системах безпеки автомобілів , стабілізації дронів та робототехніці . Автомобільний та побутової електроніки залишаються ключовими рушійними силами зростання, зі зростаючим впровадженням безпілотних автомобілів та пристроїв Інтернету речей (IoT)
2. ВОЛОКОННО-ОПТИЧНІ ҐІРОСКОПНІ ІМУ (ВОЛОКОННО-ОПТИЧНІ ҐІРОСКОПНІ ІМУ)
Інерційні модулі типу FOG (волоконно-оптичні модулі) забезпечують високу точність і низький дрейф , що робить їх ідеальними для аерокосмічної , оборонної та навігаційної галузей у середовищах, що вимагають довготривалої стабільності та точності. FOG використовують волоконно-оптичну технологію для вимірювання кутової швидкості та відомі своєю надійністю в екстремальних умовах.
| Характеристика | ІМУ ВОГ |
|---|---|
| Розмір | Більші та надійніші, ніж MEMS IMU, розроблені для високоточних застосувань. |
| Вартість | **Вища вартість**, що робить їх придатними для спеціалізованого застосування в **аерокосмічному** та **військовому** секторах. |
| Точність | **Висока точність** з мінімальним дрейфом, ідеально підходить для **довготривалої стабільності** в **аерокосмічній**, **оборонній** та **навігаційній системах**. |
| Застосування | Використовується в **аерокосмічній галузі**, **військовій обороні**, **високоякісних навігаційних системах** та **системах точного наведення**. |
| Зростання ринку | Стабільне зростання в **аерокосмічному**, **військовому** та **високоточному навігаційному** секторах, але обмежене високою вартістю. |
Перспективи ринку для інтенсивних модулів керування повітряними потоками (ІМУ):
імітаційних модулів волонтера (ВОГ) стабільно зростатиме в аерокосмічній галузі , військовій обороні та високоточній навігації . Зростаючий попит на автономні транспортні засоби , системи дослідження космосу та стимулюватиме впровадження ВОГ ІМУ. Однак їхня висока вартість та енергоспоживання залишаються обмежувальними факторами для ширшого проникнення на ринок, особливо в недорогих споживчих застосуваннях.
3. RLG IMU (кільцеві лазерні гіроскопічні IMU)
ІМУ RLG схожі на ІМУ FOG , але використовують кільцеві лазерні гіроскопи для вимірювання кутової швидкості. ІМУ RLG відомі надзвичайно високою точністю та стабільністю, і їх часто використовують у військовій, аерокосмічній та інших високопродуктивних секторах.
| Характеристика | RLG IMU |
|---|---|
| Розмір | Подібні до **FOG IMU**, **більші** та міцніші, розроблені для **високоточних застосувань** у складних умовах експлуатації. |
| Вартість | **Дуже висока вартість**, зазвичай призначена для високоякісних, критично важливих систем в **аерокосмічній** та **військовій** галузях. |
| Точність | **Надзвичайно висока точність** з мінімальним дрейфом, часто використовується в **системах навігації космічних апаратів** та **системах наведення військових ракет**. |
| Застосування | Використовується у **військовій** техніці, **космічних апаратах**, **супутниковій навігації** та інших **високоточних оборонних системах**. |
| Зростання ринку | Хоча й є нішевими, **RLG IMU** продовжують бути критично важливими для **високопродуктивної оборони**, **аерокосмічної** та **космічної систем**. Ринок стабільний з помірним зростанням через високі витрати. |
Перспективи ринку для RLG IMU:
Хоча інерційних модулів керування ракетами (RLG) обмежений через високу вартість, він залишається важливим для військової оборони та аерокосмічних застосувань, зокрема для систем наведення ракет та . Інерційні модулі керування ракетами (RLG) продовжуватимуть відігравати вирішальну роль у цих секторах, але можуть зіткнутися з конкуренцією з боку інерційних модулів волонтера (FOG) та нових технологій.
Майбутні тенденції та розвиток інерційного вимірювального блоку
Майбутнє інерційних вимірювальних пристроїв (ІМУ) позначено кількома ключовими розробками, зумовленими досягненнями в сенсорних технологіях, алгоритмах обробки даних та зростаючим попитом на прецизійні системи в різних галузях промисловості. Ось деякі з ключових тенденцій:
1. Мініатюризація та інтеграція з іншими датчиками
Зі зростанням попиту на компактні та ефективні системи спостерігається тенденція до мініатюризації інерційних датчиків (ІМУ) . ІМУ на основі MEMS продовжуватимуть розвиватися, стаючи ще меншими, економічно ефективнішими та потужнішими. Крім того, об'єднання датчиків , де ІМУ інтегруються з іншими датчиками, такими як магнітометри , GPS та барометри , для підвищення продуктивності та точності.
2. Висока точність за нижчою ціною
Нещодавні досягнення в MEMS IMU стимулюють тенденцію до досягнення високої точності за нижчою ціною . Такі моделі, як GUIDE900 та GUIDE900A, тепер можуть досягати 0,1°/год та 0,05°/год , скорочуючи розрив з FOG IMU . Це означає, що MEMS IMU будуть використовуватися в більш високоточних застосуваннях, включаючи аерокосмічні та військові системи, в яких традиційно домінували FOG IMU .
3. Інтеграція в автономні системи
ІМУ є невід'ємною частиною розробки автономних транспортних засобів , дронів та робототехніки . Зростаючий інтерес до автономної навігації та точного керування рухом стимулюватиме попит на передові ІМУ. Інтеграція ІМУ з алгоритмами штучного інтелекту та машинним навчанням дозволяє системам ефективніше адаптуватися до реальних умов.
4. Використання штучного інтелекту та об'єднання даних сенсорів
Алгоритми штучного інтелекту відіграватимуть дедалі важливішу роль в обробці даних IMU . Поєднуючи дані IMU з іншими вхідними даними датчиків та використовуючи машинне навчання , автономні системи зможуть робити точніші прогнози та коригування. Очікується, що поєднання IMU з такими технологіями, як системи зору , LiDAR та радар, розширить межі навігації та стабілізації в режимі реального часу.
5. Покращена довговічність та стійкість до впливу навколишнього середовища
Очікується, що інерційні модулі (ІМУ) стануть ще надійнішими та стійкішими до суворих умов, таких як екстремальні температури, вібрація та електромагнітні перешкоди. ІМУ з відкритим випромінюванням (ВОГ) та ІМУ з мікроелектромеханічними системами (МЕМС) розвиватимуться, щоб задовольнити зростаючий попит в аерокосмічній , оборонній та промисловій галузях .
