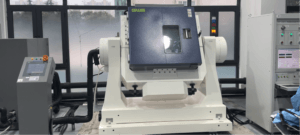
Дизайн GuideNav: як міцні волоконно-оптичні інерційні модулі витримують удари та вібрацію
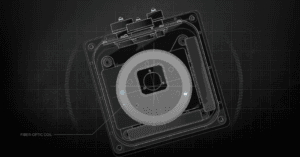
Міцні волоконно-оптичні інерційні модулі (ІМУ) досягають надзвичайної надійності завдяки поєднанню титанових корпусів, плаваючих підвісок котушок, еластомерних та тросових ізоляторів, а також компенсації сигналу на основі штучного інтелекту. Ці технології дозволяють їм бездоганно функціонувати в умовах інтенсивної вібрації та ударів там, де звичайні гіроскопи виходять з ладу.
Чому випробування на старіння є важливими для волоконно-оптичних IMU та INS?
Випробування на старіння волоконно-оптичних інерційних модулів (ІМУ) та інерційних модулів (ІНС) не є зайвими витратами, а є науковими методами прогнозування терміну придатності, встановлення гарантійних термінів та забезпечення надійності роботи в реальних умовах.
Як волоконно-оптична INS виконує ініціалізацію навігації перед місією?
Волоконно-оптична ІНС ініціалізується перед злетом, стабілізуючи температуру, вирівнюючи гіроскопи та акселерометри, оцінюючи зміщення та виконуючи грубе та точне вирівнювання положення, забезпечуючи точну навігацію з першої секунди польоту.

Чому потрібно регулярно вмикати волоконно-оптичні інерційні модулі (ІМУ)?
Регулярне ввімкнення волоконно-оптичного інерційного блоку стабілізує його теплове середовище, оновлює калібрування зміщення та запобігає довготривалій деградації електронних компонентів, забезпечуючи швидкий запуск та надійну роботу.

FOG North Finder проти FOG INS: у чому справжня різниця?
Північний шукач FOG та FOG INS – це різні речі. Північний шукач визначає справжній курс, використовуючи обертання Землі, тоді як FOG INS надає повні навігаційні дані – положення, швидкість та орієнтацію – за допомогою гіроскопів, акселерометрів та навігаційних алгоритмів.
10 поширених помилок інженерів під час використання волоконно-оптичних гіроскопів (ВОГ)
Датчики вільного виходу з ладу (ВОГ) часто виходять з ладу в польових умовах не через погану конструкцію, а через помилки використання — неправильне вирівнювання, вібрацію, слабке калібрування або ігнорування електромагнітних перешкод. Уникнення цих 10 поширених помилок забезпечує продуктивність навігаційного рівня. GuideNav надає ВОГ без ITAR-забруднення експертну підтримку інтеграції, щоб допомогти покупцям та інженерам досягти успіху.