"Чи варто йти з Мемс чи Туманом?" - Це питання, яке я найбільше чую, а не тому, що люди не знають специфікацій. Що не впевнено, що насправді має значення на практиці: це дрейф, ударна стійкість чи просто бюджет? І занадто часто, неправильний дзвінок не провалюється відверто - це не вдається спокійно, поки не пізно відновитися.
MEMS IMUS менший, легший та більш економічний, що робить їх ідеальними для систем, що обмежуються простором та потужністю. FOG IMUS, навпаки, забезпечує значно кращу стабільність упередженості, нижчий дрейф та чудові показники в суворих або GNSS-середовищах.
Компроміси не очевидні-проведіть, що насправді має значення.
Зміст
Як працюють MEMS та туманні гіроскопи?
Гіроскопи MEMS вимірюють рух шляхом виявлення крихітних зрушень у вібраційній структурі кремнію - як, відчуваючи, як настроюється вилка при поверненні. Вони побудовані на мікросмасштабних мікросхемах, що робить їх компактними, енергоефективними та доступними.
З іншого боку, туманні гіроскопи Вони відправляють лазерні промені через довгу котушку оптичного волокна; Коли пристрій обертається, промені злегка зміщуються з синхронізації - явище, яке називається ефектом саньяки. Це дозволяє туманам виявляти обертання з винятковою точністю, нульовими рухомими частинами та надзвичайною стабільністю з часом.
MEMS проти туману: Як вибрати потрібну?
Вибір між MEMS та FOG не повинен бути складним - зосередившись на кількох ключових факторах продуктивності, ви можете швидко звузити правильну придатність для вашої програми.
1. Точність
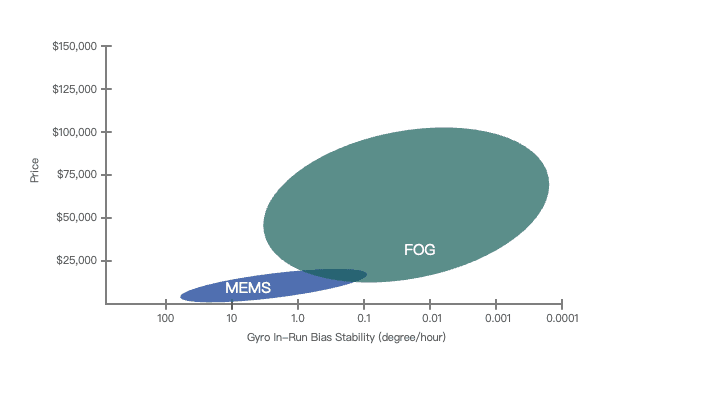
При оцінці точності найважливішими параметрами є стабільність зміщення та кутова випадкова прогулянка (ARW) . Нижче наведено порівняння продуктів Guidenav на основі цих ключових показників.
| Параметр | Мемс | Туман |
|---|---|---|
| Стабільність зміщення (°/год) | 0.05 ~ 3 | 0.003 ~ 0.5 |
| Кут випадкової прогулянки (°/√h) | 0.05 ~ 0.45 | 0.0002 ~ 0.02 |
2. Розмір та вага
MEM є компактними та легкими для космічних систем, тоді як туман більший і важчий, підходить для висококласних або фіксованих платформ.
3. Споживання електроенергії
MEMS зазвичай споживає менше 1 Вт, що робить їх ідеальними для акумуляторних та мобільних платформ. На відміну від цього, туман може зажадати понад 10 Вт завдяки їх оптичним системам на основі лазерних систем і часто вимагати додаткового теплового управління-заснованим на порівняльних даних з продуктового портфеля Guidenav.
4. Довгострокова стабільність
Туман із закритим циклом пропонує вищу довгострокову точність та екологічну стійкість, тоді як MEMS, хоч і просувається в техніці компенсації, все ще відстає від стійкої стабільності.
5. Вартість
МЕМ є рентабельними та придатними для високих обсяг застосувань, тоді як туман значно дорожчі та націлені на висококласних, критичних ринках.
Окресивши первинні відмінності точності, форм-фактора, ефективності енергії, довгострокової стабільності та витрат, у таблиці нижче представлено всебічне порівняння з боку для підтримки більш обґрунтованої оцінки.
| Особливість | MEMS IMU | ТУМАН ІМУ |
|---|---|---|
| технології | Мікромеханічні датчики на основі кремнію | Оптичні гіроси з використанням волоконних котушок та легких перешкод |
| Розмір та фактор форми | Дуже компактний, підходить для обмежених космосом конструкції | Об'ємніша форма за рахунок маршрутизації волокон та оптики |
| Точність | Помірна точність для загального використання | Висока точність, придатна для критичних систем |
| Вартість | Низька вартість, ідеально підходить для виробництва обсягу | Значно більша вартість через складність |
| Споживана потужність | Високоефективне з мінімальною потужністю | Споживає більше потужності, як правило, для використання високого класу |
| Типові програми | Безпілотники, носіння, автомобільні, споживчі пристрої | Оборона, аерокосмічна, морська, висококласна промислова |
| Принцип дії | Виявляє рух через вібраційні масові структури | Використовує ефект саньяки для виявлення кутової швидкості |
| Екологічна стабільність | Чутливий до тепла та вібрації з часом | Високостійкий до теплового дрейфу та механічного напруження |
| Рівень точності | Адекватний для короткострокової або допомоги навігації | Підтримує підсумки підрозділу протягом тривалого періоду |
| Чуйність | Швидко та чуйні в динамічних системах | Стабільна реакція; трохи повільніше, ніж Мемс |
| Довговічність | Стійкий, але менш стабільний в екстремальних умовах | Розроблений для екстремальних, важливих для місії середовища |
| Інтеграційні зусилля | Простий в інтеграції з більшістю платформ | Вимагає ретельного налаштування та вирівнювання на рівні системи |
Чи може точність MEMS перевершити туман?
З точки зору експерта, туман все ще призводить до точності - особливо з точки зору стабільності зміщення та низького шуму . Ось чому це залишається вибором для високоточної навігації .
Але технологія MEMS швидко наздоганяє . Сьогоднішній тактичний клас Mems Gyros може досягти:
- Нестабільність зміщення до 05 °/год
- Кут випадкової прогулянки навколо 01 °/√hr
Це ставить їх близько до туманів початкового рівня , але в меншому, більш легкому та значно дешевому формуваному факторі.
У той час як тумани вищого рівня все ще перевершують MEMS у ультрабічних та тривалих випадках використання, сучасні MEM тепер досить точні для багатьох вимогливих додатків, особливо коли розмір, вага, потужність та витрати .

Які випадки використання в реальному світі для MEMS та туману?
Вибір між MEMS та туманом в кінцевому підсумку формується тим, що система повинна протистояти - і скільки помилок вона може терпіти з часом. Нижче наведено розрив, де кожна технологія вписується в реальні розгортання:
Випадки використання MEMS IMU
MEMS IMUS оптимізовані для додатків, де розмір, вага, споживання електроенергії та ефективність витрат мають перевагу над надвисокою точністю.
- Безпілотники (БПЛА)
ідеально підходять для безпілотників малих та середніх розмірів, що покладаються на GNSS для виправлення - Споживча та промислова робототехніка,
що використовується для відстеження руху, контролю балансу та зворотного зв'язку - Автомобільні системи (ADAS, мертві розрахунки, стабілізація)
, коли зливаються з GNSS або колесами колеса - Носіння та портативні
зондування руху в компактних пристроях, що працюють на батареї
MEMS добре працює в системах, де доступна зовнішня корекція, а толерантність до дрейфу прийнятна.
Випадки використання туману ІМУ
Туманний imus вибирається, де інерційна точність повинна залишатися безкомпромісною під стресом, ізоляцією або розширеною тривалістю .
- оборони та військових платформ
, стабілізація транспортних засобів, ракета та башточки - Морські та підводні системи
довгострокових суден, ROVS та інерційна навігація під відключенням GNSS - Космічні та аерокосмічні програми
запускають платформи, супутники та контроль за космічними апаратами - Дослідження та точні
програми для буріння, які потребують заголовка підрозділу з часом без скидання
Туман дозволяє безперервності місії, коли MEMS виходитиме за межі прийнятних порогів.
У Guidenav ми пропонуємо всебічне портфоліо як MEMS, так і туману, розробленого для задоволення різноманітних потреб комерційних, промислових та оборонних заявок. Незалежно від того, чи є пріоритет розміром та ефективністю чи довгостроковою інерційною точністю, ми надаємо варіанти, пристосовані до кожного конверта продуктивності.

Наскільки дорожче туман порівняно з MEMS?
ІМУ на основі туману, як правило, в 8-10 разів дорожчі, ніж одиниці на основі MEMS. Цей розрив у ціні керує:
- Високі компоненти, такі як волоконні котушки та інтерферометрична оптика
- Точність складання, що вимагає жорстких допусків та калібрування
- Виробництво з низьким обсягом, на відміну від MEMS, які отримують користь від масового виробництва
На відміну від цього, MEMS IMUS використовує економічно ефективні кремнієві процеси і простіше масштабувати, що призводить до того, що ціни часто менше десятої частини туманних систем.
Як я можу вирішити, чи потрібні мені mems чи туман для мого проекту?
Це залежить від вашої програми, необхідної точності та навколишнього середовища. У Guidenav ми пропонуємо як MEMS, так і системами IMUS на основі туману, починаючи від компактних, економічно ефективних одиниць до високоточних тактичних класів.
Щоб визначити, яка сенсорна технологія найкраще відповідає вашому проекту, рекомендуємо оцінити наступні фактори:
- Деталі програми.
- Ключові вимоги до продуктивності: (наприклад, стабільність упередженості, динамічний діапазон, умови навколишнього середовища тощо)
Все ще не впевнений? Поділіться своїми характеристиками - ми рекомендуємо найкраще підходити для вашої системи.
