Інерційні одиниці вимірювання (IMUS) є основою навігаційних систем у ракетах. Вони надають дані, необхідні для направлення ракети до її цілі з високою точністю. Без надійної ІМУ ракета намагалася б підтримувати стабільний шлях польоту, що могло б поставити під загрозу її місію.
Інерційний блок вимірювання (ІМУ) - це пристрій, який вимірює прискорення, швидкість та орієнтацію об'єкта. Роль ІМУ щодо ракетної ракети , необхідна для того, щоб ракета з точністю досягла своєї цілі.
У цій статті я розбиваю критичні компоненти, які складають ІМУ, ключові показники для лотінг-ракетних додатків та який тип ІМУ найкраще підходить для цих операцій з високими ставками.
Зміст
Що таке інерційна одиниця вимірювання (ІМУ)?
Інерційний блок вимірювання (ІМУ) - це пристрій, який вимірює прискорення, швидкість та орієнтацію об'єкта. Він діє без необхідності зовнішніх сигналів. Ця незалежність робить його ідеальним для використання в середовищах, де сигнали GPS можуть бути ненадійними. Всередині ІМУ, як правило, ви знайдете акселерометри та гіроскопи. Ці датчики працюють разом для відстеження руху та обертання, гарантуючи, що шлях польоту ракети залишається точним.
Як інженер, який працював у інерційній навігаційній галузі понад 8 років, я можу вам сказати, що ключовою роллю ІМУ є надання даних у режимі реального часу на швидкість, положення та кут ракети. Це дозволяє системі управління ракетою постійно регулювати шлях польоту. Цей рівень точності є життєво важливим для тривалих польотів та цільових ударів .
Чому ракети Loitering покладаються на інерційну одиницю вимірювання (ІМУ)?
Ракети Loitering розроблені для тривалого періоду в повітрі під час моніторингу цілі. Для цього важлива точна навігація. ІМУ дозволяє ракеті постійно регулювати свій хід, компенсуючи зміни швидкості, вітру чи інших факторів навколишнього середовища. Якщо ракеті не вистачає точних позиційних даних, це може відійти від курсу. І це може призвести до невдачі місії або ще гірше, невдалого страйку по цілі.
Для ракетних систем дані з високою точністю-це не лише керування ракетою до загального місця. Йдеться про те, щоб ракета могла маневрувати точно та надійно на великі відстані. ІМУ є ключовим для досягнення цього рівня точності. Без цього ракета не змогла б внести виправлення курсу в режимі реального часу. Це означає більш високі ризики, більше витрачених ресурсів та менш ефективних місій.
Основні параметри для Loitering RAIDE IMUS
Що стосується IMUS для ракет, що переживають, то точність не підлягає обговоренню. Однак є інші життєво важливі параметри, які слід враховувати. Стабільність зміщення ІМУ має вирішальне значення, оскільки будь -який дрейф може призвести до помилок з часом. Аналогічно, швидкість дрейфу визначатиме, скільки системи може відхилятися, перш ніж вимагати повторного калібрування. ІМУ також повинен доставити швидкі оновлення даних з мінімальною затримкою . Швидкість є критичною для коригування в режимі реального часу.
| Параметр | опис | Важливість для ракет Loitering |
|---|---|---|
| Точність | Здатність ІМУ вимірювати точний рух. | Необхідний для збереження ракети на курсі під час тривалих польотів. |
| Стабільність зміщення | Узгодженість показань датчиків з часом. | Запобігає поступовому дрейфу, який може скинути шлях ракети. |
| Швидкість дрейфу | Швидкість, з якою читання ІМУ відхиляються. | Низький дрейф забезпечує постійну точність без повторної калібрування. |
| Затримка | Затримка між входом датчика та виходом. | Швидка обробка має вирішальне значення для негайних виправлень курсу. |
Як хтось із багаторічним досвідом роботи в інерційних навігаційних системах, я з перших вуст бачив, як низький час дрейфу та швидкий час реагування може змінити успішну місію. IMUS з поганою стабільністю зміщення або високими показниками дрейфу просто не може забезпечити необхідну продуктивність, особливо в ракетних системах, які потребують швидких, частих коригувань.
Вимоги до точності ракетної ракети ІМУ
Точність (стабільність зміщення) інерційного вимірювального одиниці для ракети, що лунає, може змінюватися залежно від складності місії та залежності від зовнішніх навігаційних систем. Нижче наведено короткий зміст до стабільності упередженості для різних сценаріїв:
1. Місії високої точності (наприклад, точні атаки)
- Стабільність зміщення : 01 °/год до 0,1 °/год
Розум:
- Висока точність необхідна для точної цільової залучення, особливо для складних сценаріїв місії, що включають точні удари.
- ІМУ потрібно забезпечити стабільний політ та точне націлювання, особливо під час остаточного підходу.
Рекомендований тип IMU : f iber o ptic g y roscope на основі ІМУ
Рекомендована модель туману ІМУ: Gfimu 400, Gfimu 500

2. Помірні точні місії (наприклад, загальні удари поля бою)
- Стабільність зміщення : 1 °/год до 0,5 °/год
Розум:
- Помірна точність необхідна для загальних місій поля бою, де ціль може бути менш критичною, або зона залучення більш гнучкою.
- ІМУ може бути доповнений іншими системами настанов, такими як візуальні або GPS-системи, для підтримки точності.
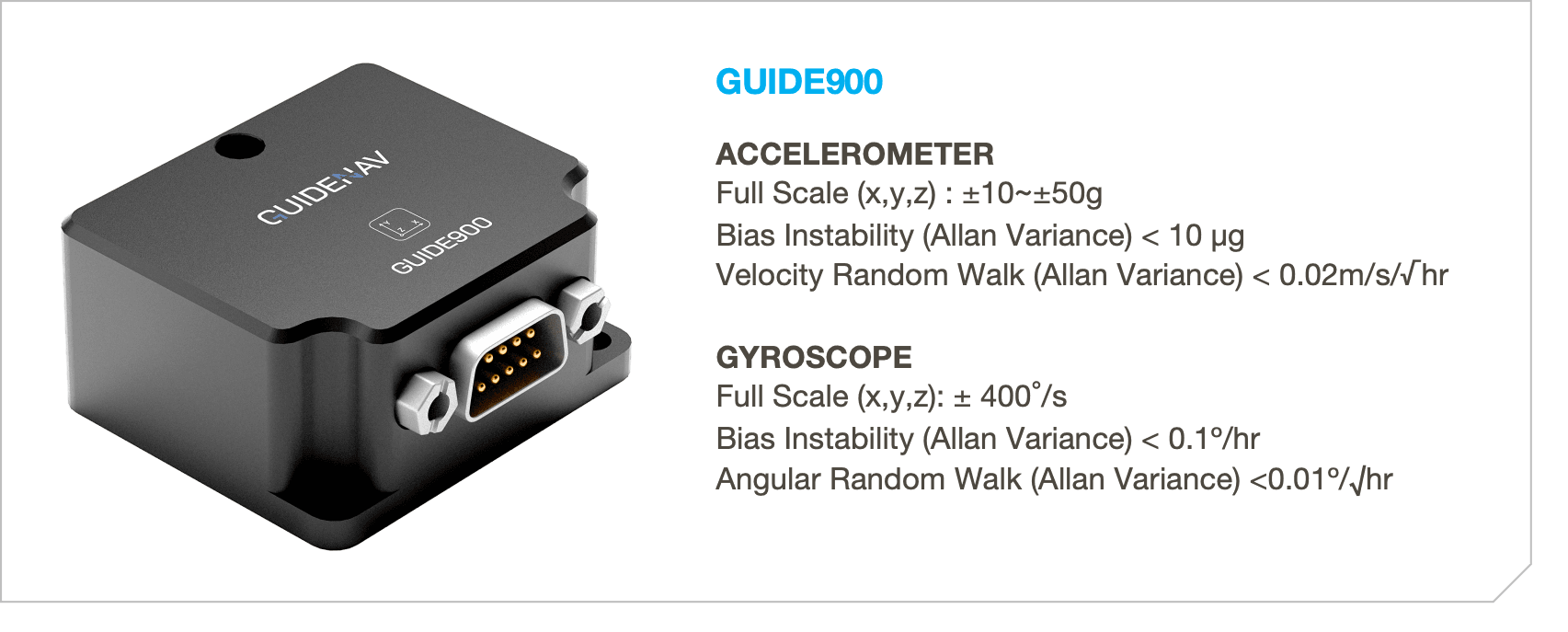
Рекомендований тип ІМУ : MEMS IMU або туман ІМУ (залежно від вимог місії)
Рекомендована модель MEMS IMU: Guide900
3. Недостатні або простіші місії (наприклад, напад на нижчу вартість або рухомі цілі)
- Стабільність зміщення : 5 °/год до 2,5 °/год
Розум:
- Для дешевих ракет або менш критичних цілей точність ІМУ може бути розслабленою, особливо коли час польоту короткий або складність місії низька.
- Ці системи можуть більше покладатися на навігацію платформи (наприклад, БПЛА) або прості датчики на борту, зменшуючи потребу в високоточній ІМУ.
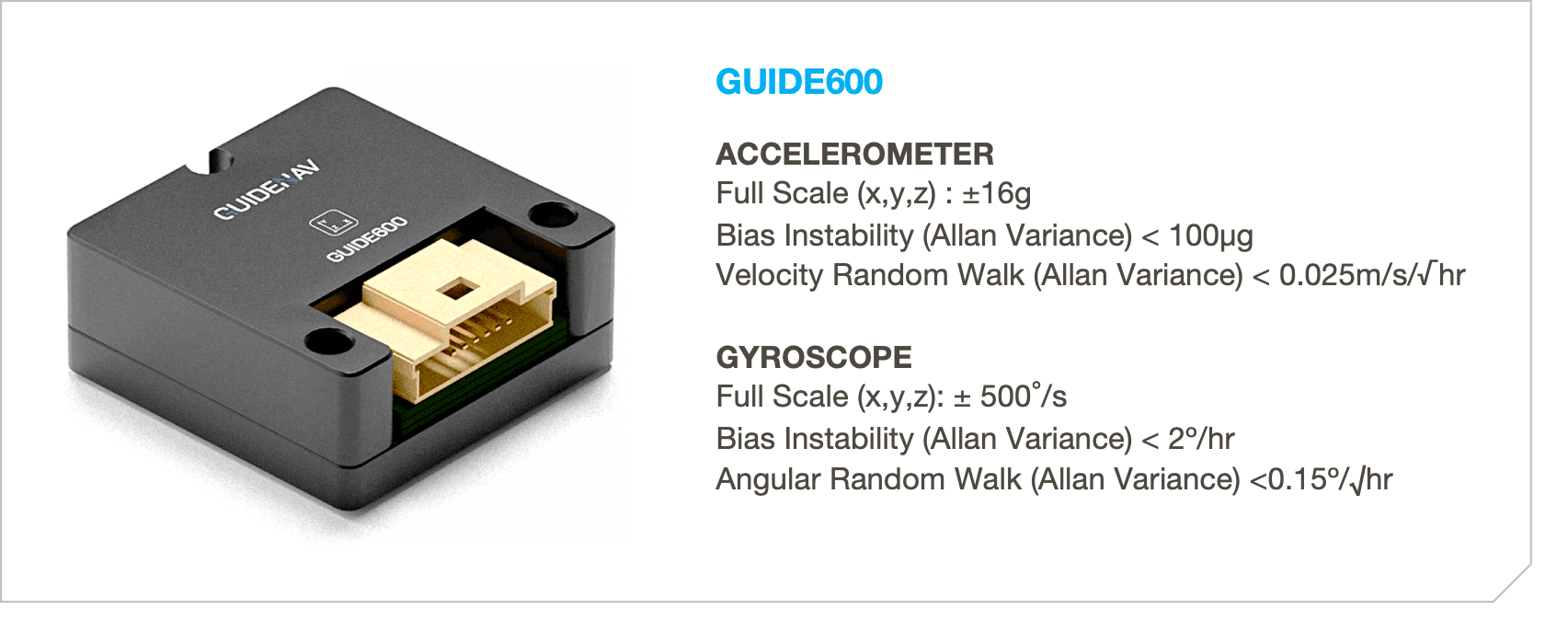
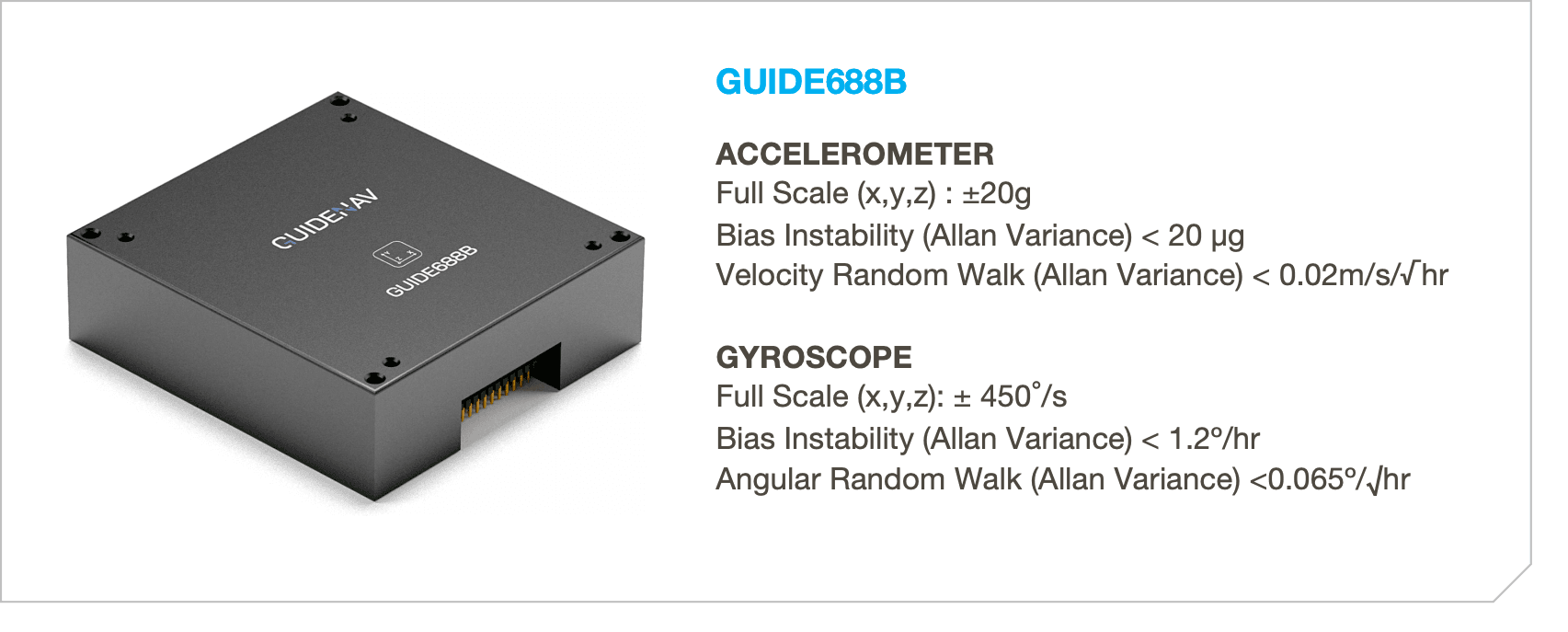
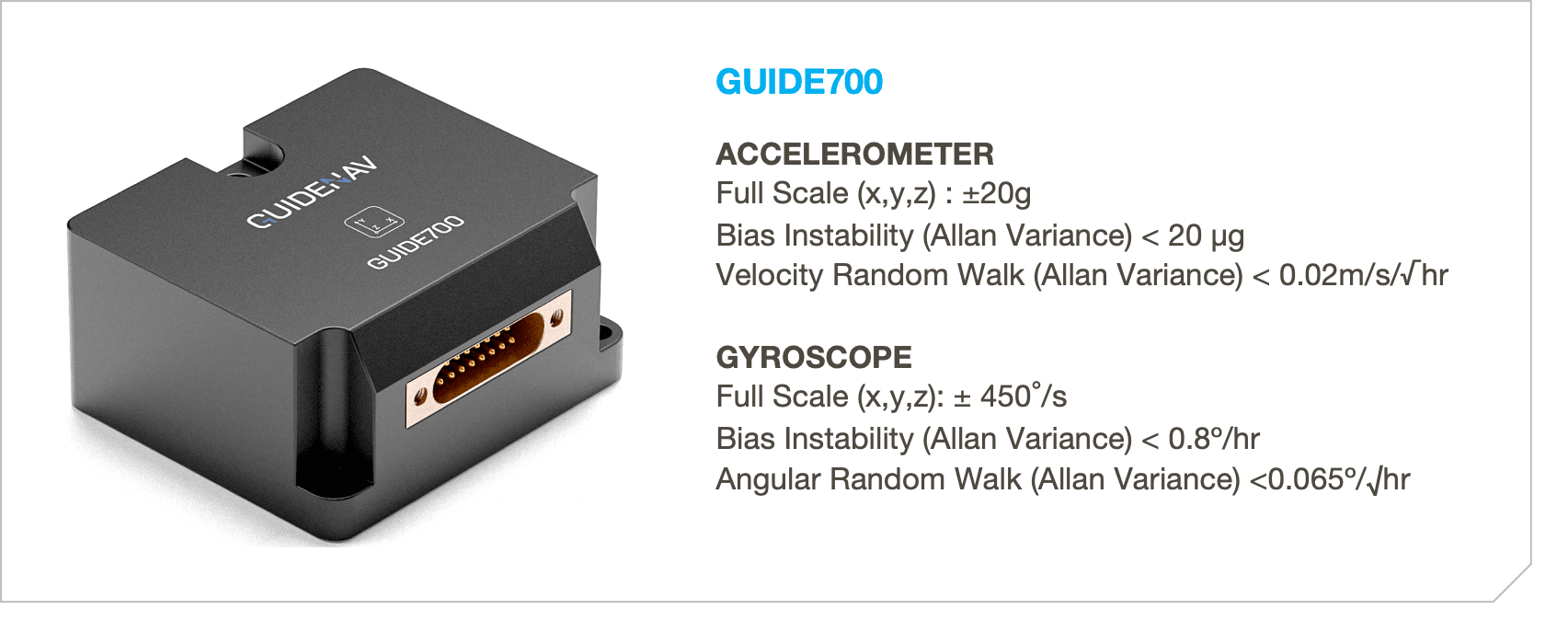
Рекомендований тип ІМУ : MEMS IMU
Рекомендована модель MEMS IMU: Guide700, Посібник 688 B , Посібник 600
4. Залежні від датчиків місії (наприклад, покладаючись на зовнішні датчики для націлювання)
- Стабільність зміщення : 5 °/год до 5 °/год
Розум:
- Для місій, сильно залежних від зовнішніх датчиків (наприклад, візуального, радіолокатора або GPS), точність ІМУ може бути розслаблена, оскільки зовнішні системи виконують більшу частину навігації та настанов.
- ІМУ служить головним чином як додатковий датчик, з основною опорою на зовнішні дані для успіху місії.
Рекомендований тип ІМУ : MEMS IMU
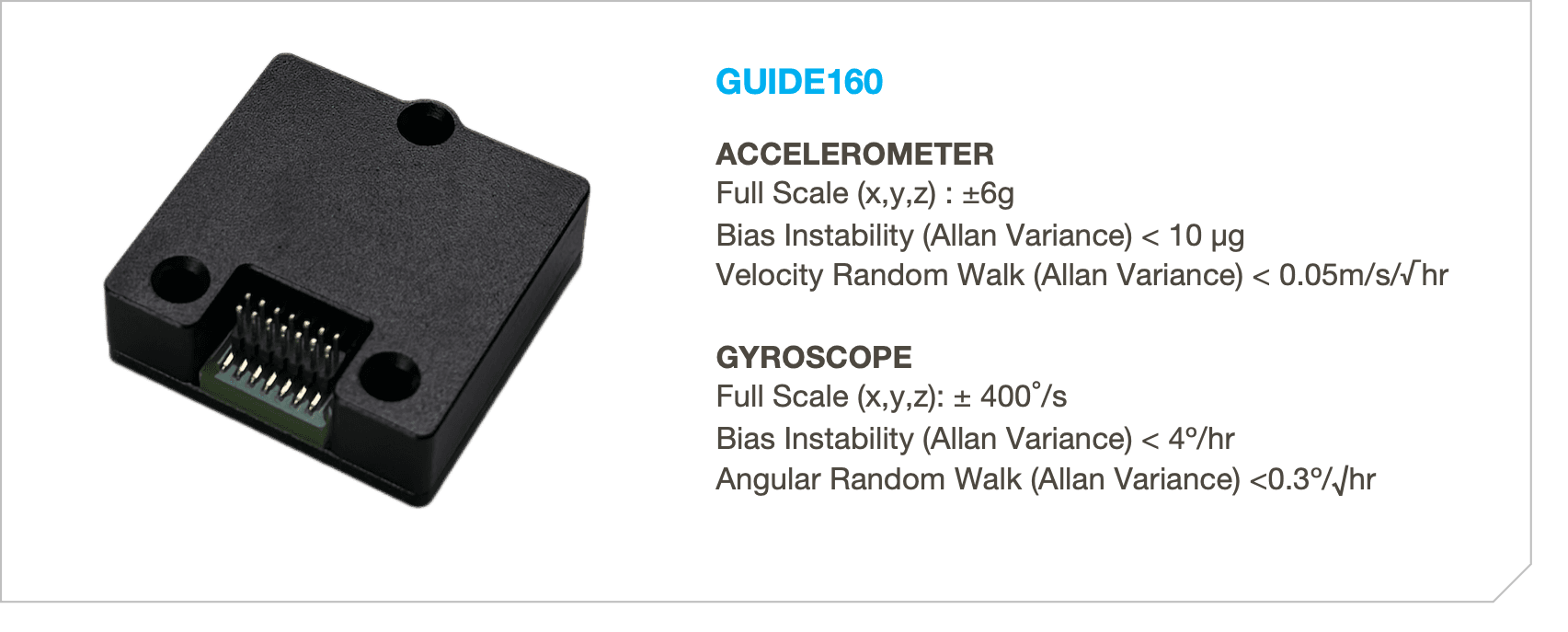
Рекомендована модель MEMS IMU: Guide160
Посилання
Для ракетних систем дані з високою точністю-це не лише керування ракетою [^1] до загального місця.
[^1]: Дослідження механіки руху ракети пропонує уявлення про передові ракетні технології та їх операційну ефективність.
Ключові показники для лотінг -ракетних програм [^2]
[^2]: Розуміння ключових показників для лотрингу ракетних додатків може дати уявлення про їх операційну ефективність та стратегічну цінність.