Інерціальні вимірювальні блоки (ІВБ) – це безшумні робочі конячки сучасної навігації. Вони відчувають кожен рух, обертання та прискорення, передаючи життєво важливі дані БПЛА, кораблям, наземним транспортним засобам та аерокосмічним системам. Однак, незважаючи на їхню критичну роль, ІВБ часто неправильно розуміють або використовують неправильно. Невеликі помилки на етапі інтеграції можуть перерости в масштабні експлуатаційні збої, що призводять до дрейфу, нестабільності або навіть втрати місії. Правда в тому, що інтеграція ІВБ – це не просто питання «підключив і працюй». Вона вимагає точності, дисципліни та передбачливості.
Помилки інтеграції IMU можуть зруйнувати надійність навігації. Від неправильного вирівнювання та вібрації до поганого калібрування та надмірної залежності від об'єднання датчиків, інженери часто повторюють ті самі помилки. У цьому посібнику ми розглянемо 10 найпоширеніших помилок інтеграції IMU, пояснимо їхні наслідки та надамо експертні рішення, які ви можете застосувати у власних проектах.
Зміст
Нерівність під час встановлення
Помилка:
Інженери іноді монтують інерційні модулі (ІМУ) «досить близько» до системи відліку платформи без точного вирівнювання. Кілька градусів похибки можуть здаватися незначними, але в навігації ці зміщення переростають у величезні похибки.
Вплив:
Неправильно вирівняні осі призводять до систематичного зміщення оцінок положення та швидкості. Під час тривалих місій це призводить до збільшення дрейфу, особливо в операціях без GPS, де IMU є єдиним джерелом достовірної інформації. БПЛА може повільно відхилятися від курсу, або роботизований апарат може неправильно оцінити свій напрямок.
Виправити:
Завжди визначайте опорні осі в САПР та використовуйте точні інструменти, такі як лазерні вирівнювальні шаблони, під час встановлення. Після монтажу виконайте калібрування вирівнювання, щоб виміряти та компенсувати невеликі зміщення.
💡Порада професіонала: Ніколи не довіряйте лише механічним допускам — калібрування після інтеграції — це ваша захисна мережа.
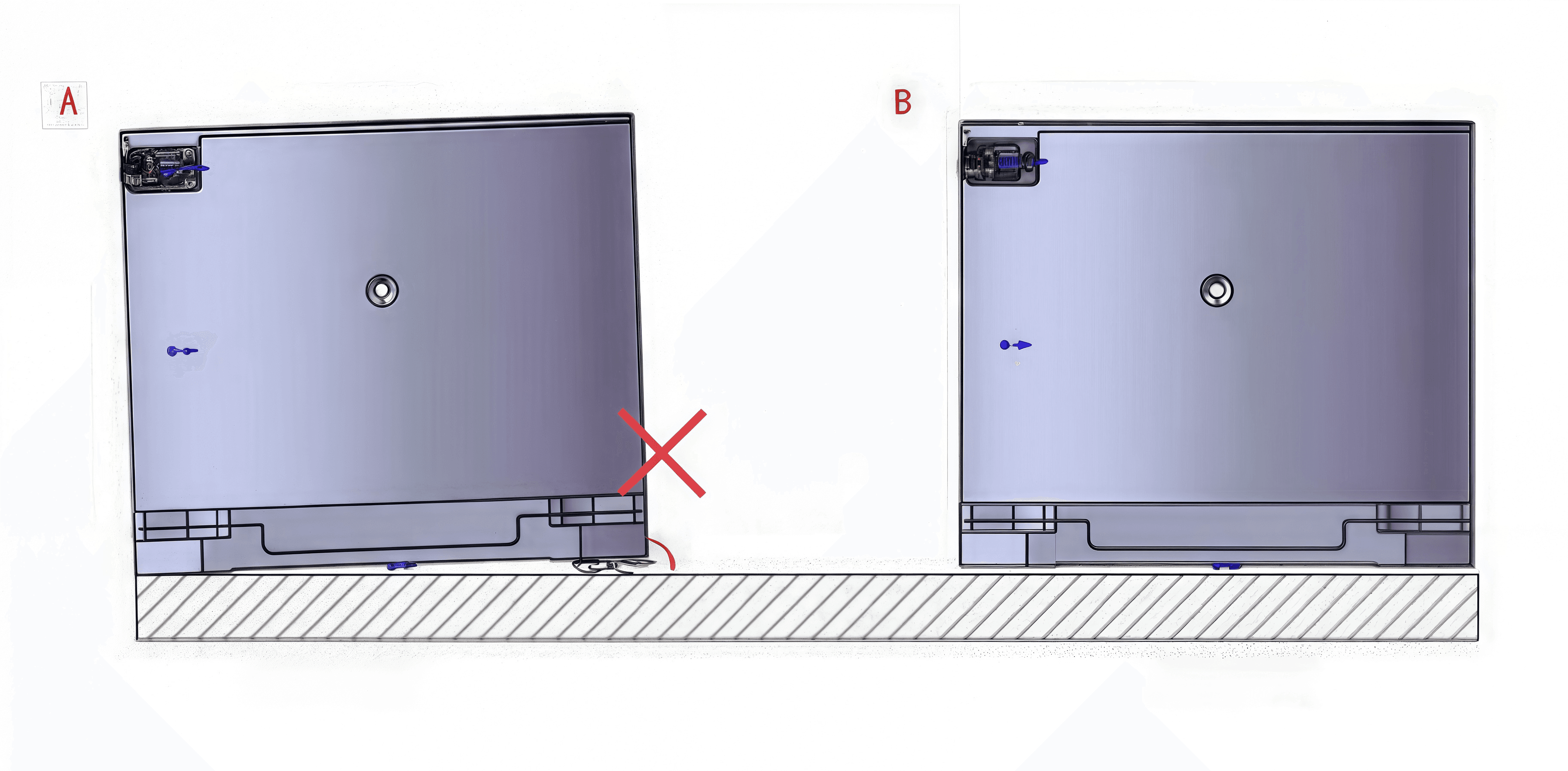
Ігнорування віброізоляції
Помилка:
Встановлення IMU безпосередньо на вібруючі конструкції, такі як важелі гвинтів, двигуни або шасі транспортного засобу, за умови, що внутрішні фільтри датчика компенсуватимуть це.
Вплив:
Вібрація забруднює сигнали акселерометра та створює хибні кутові швидкості в гіроскопах. Результатом є шумні вихідні сигнали, нестабільні навігаційні фільтри та видиме тремтіння в системах стабілізації. У літаках або карданних підвісах вібрація може погіршити точність наведення.
Виправити:
Використовуйте віброізолятори, налаштовані на домінуючі частоти вашої платформи. Поєднуйте апаратне демпфування з цифровою фільтрацією для зменшення залишкових ефектів. Перевіряйте продуктивність під реальними навантаженнями, а не лише на лабораторних стендах.
💡Порада професіонала: Завжди виконуйте аналіз спектру вібрації вашої платформи, перш ніж остаточно розробляти проект ізоляції.
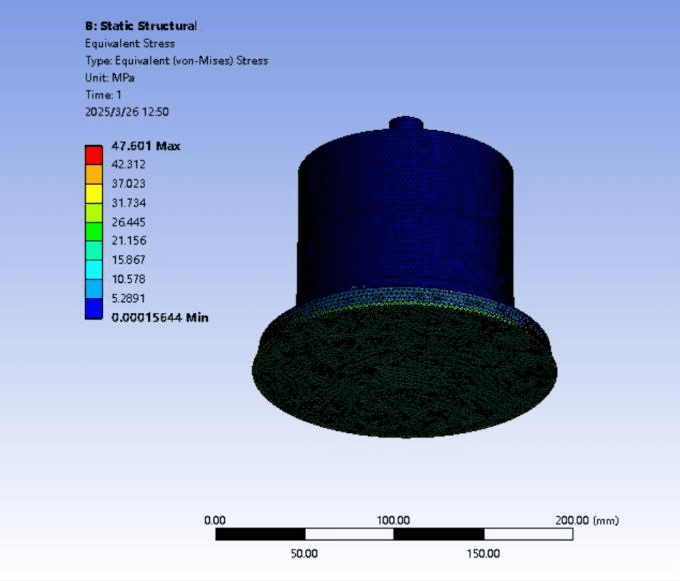
Ігнорування теплового управління
Помилка:
Припускаючи, що вбудована температурна компенсація IMU вирішує всі проблеми з теплом.
Вплив:
Реальні місії передбачають швидке нагрівання від електроніки, вихлопних газів двигунів або умов холодного витримування. Це призводить до нестабільності зміщення, дрейфу масштабного коефіцієнта та зниження точності. У космосі термоциклування може бути катастрофічним, якщо його не враховувати.
Виправити:
Розробляйте терморегуляцію на системному рівні. Варіанти включають ізоляційні корпуси, додавання розподільників тепла або навіть керовані нагрівачі. Контролюйте бортові датчики температури, щоб відстежувати стабільність протягом усього профілю польоту.
💡Порада професіонала: тестуйте інерційні модулі (ІМУ) за реальних теплових циклів, а не лише за статичних температурних точок.
Вибір неправильного рівня продуктивності
Помилка:
Вибір інерційної системи (ІМУ) виключно на основі вартості, розміру або доступності, без урахування тривалості місії чи вимог до точності.
Вплив:
Споживчі MEMS можуть виглядати прийнятними в коротких тестах, але будуть неконтрольовано дрейфувати в умовах тривалих випробувань або відсутності GPS. Тактичні MEMS або FOG IMU потрібні для серйозних місій, але команди часто пропускають їх, щоб скоротити бюджет, що призводить до дороговартісного перероблення конструкції пізніше.
Виправити:
Узгодьте продуктивність IMU (нестабільність зміщення, випадкове блукання, пропускна здатність) з потребами місії. Використовуйте споживчі MEMS для любительських дронів, тактичні MEMS для БПЛА та оборонних машин, а також FOG для морських або аерокосмічних операцій.
| Тип IMU | Поширене зловживання | Правильне застосування |
|---|---|---|
| Споживчі МЕМС | Обраний за вартістю | Коротка, некритична робототехніка |
| Тактичні МЕМС | Недооцінений через ціну | БПЛА, безпілотні літальні апарати, оборонні платформи |
| ТУМАН ІМУ | Вважається надмірністю | Морська, аерокосмічна, операції без GPS |
💡Порада професіонала: Завжди оцінюйте вартість життєвого циклу невдачі місії порівняно з початковою вартістю датчика.
Невдала стратегія калібрування
Помилка:
Покладаючись виключно на калібрування виробника, припускаючи, що воно є універсально дійсним.
Вплив:
Механічні допуски, помилки монтажу та напруження в роз'ємах створюють системні зміщення. Без вторинного калібрування ці помилки погіршують продуктивність навігації та результати злиття.
Виправити:
Виконайте калібрування на рівні системи, наприклад, шестипозиційні випробування або характеристику таблиці швидкостей. Оновіть калібрувальні таблиці в прошивці та періодично повторюйте їх для узгодженості.
💡Порада професіонала: ставтеся до калібрування як до періодичного етапу технічного обслуговування, а не до одноразового заводського процесу.
Неадекватний інтерфейс та обробка даних
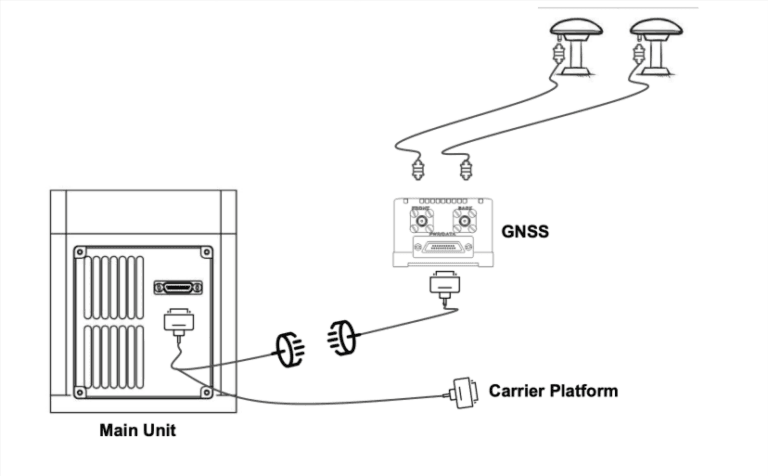
Помилка:
Неправильно налаштовані частоти дискретизації, ігнорування затримки або неможливість синхронізації даних з іншими датчиками.
Вплив:
Навіть високоякісні інерційні модулі (IMU) стають ненадійними, якщо їхні дані затримуються або неправильно вирівнюються. Злиття з GNSS, LiDAR або оптичним зображенням не вдається, коли часові позначки не збігаються.
Виправити:
Розробляйте надійні канали передачі даних. Використовуйте PPS або апаратні мітки часу для синхронізації всього процесу. Перевіряйте наскрізну затримку від датчика до процесора.
💡Порада професіонала: Сприймайте синхронізацію часу як частину якості датчика, а не як щось другорядне.
Ігнорування магнітних та електромагнітних перешкод
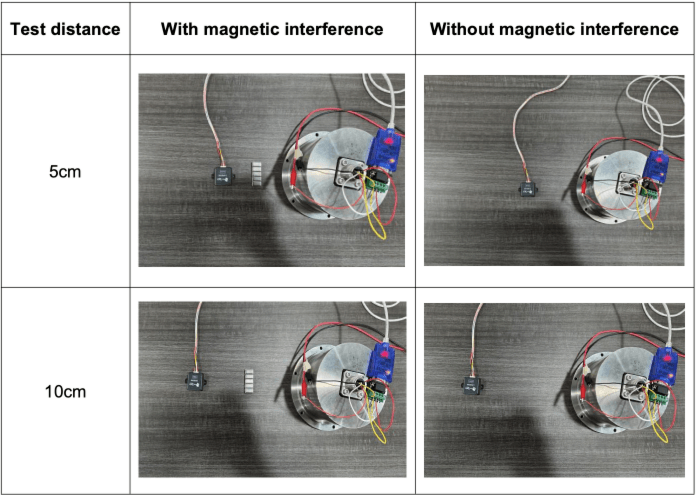
Помилка:
Встановлення інерційних модулів (ІМУ) поблизу двигунів, сильнострумових кабелів або радіочастотних антен.
Вплив:
Магнітні поля спотворюють сигнали акселерометра та гіроскопа. Електромагнітні перешкоди потрапляють в електроніку датчиків, спричиняючи паразитні виходи. Це особливо поширене явище в стабілізаторах БПЛА, де компактні конструкції розміщують датчики небезпечно близько до двигунів.
Виправити:
Розміщуйте інерційні блоки (ІМУ) подалі від джерел електромагнітних перешкод. Використовуйте екрановані корпуси, виту пару та заземлення. Випробовуйте під повним електричним навантаженням, щоб виявити приховані перешкоди.
💡Порада професіонала: Чітка механічна конструкція може вирішити проблеми електромагнітних перешкод ефективніше, ніж складна фільтрація.
Не враховуючи довгостроковий дрейф
Помилка:
Перевірка IMU за допомогою короткочасних випробувань, ігноруючи дрейф протягом годин або днів.
Вплив:
Нестабільність зміщення накопичується, спричиняючи кілометрові похибки позиціонування. Системи, що покладаються виключно на інерційні модулі (підводні човни, космічні кораблі, безпілотні літальні апарати з глушінням GPS), стають непридатними для використання.
Виправити:
Проводьте випробування на витривалість, що імітують тривалість місій. Оберіть тактичні або FOG IMU для довготривалої навігаційної стабільності.
💡Порада професіонала: Завжди оцінюйте дрейф протягом 100+ годин, а не лише 10 хвилин у лабораторії.
Надмірна залежність від об'єднання даних сенсорів
Помилка:
Припускаючи, що фільтри Калмана або злиття на основі штучного інтелекту можуть виправити слабкі IMU.
Вплив:
Погані сигнали датчиків просто забруднюють фільтр. Замість підвищення точності, злиття множить помилки — «сміття на вході, сміття на виході».
Виправити:
Почніть з надійних даних IMU. Злиття даних має покращити продуктивність, а не рятувати несправні датчики. Використовуйте резервування, де це можливо, для перевірки сигналів.
💡Порада професіонала: хороший IMU зменшує складність фільтра та значно підвищує його надійність.
Недооцінка екологічної кваліфікації
Помилка:
Тестування інерційних модулів (ІМУ) лише в лабораторних умовах та припускаючи, що польові результати будуть такими ж.
Вплив:
Вологість, пил, удари та екстремальні погодні умови перевищують комерційні характеристики. Без належної кваліфікації інерційні модулі не справляються з критично важливими місіями.
Виправити:
Виберіть IMU, протестовані за стандартами MIL-STD-810G, DO-160 або еквівалентними. Запитуйте дані випробувань, а не лише заявки в паспорті даних.
💡Порада професіонала: запитуйте у постачальників звіти про кваліфікацію — реальні дані перевершують маркетингові обіцянки.
Висновок
Інтеграція IMU – це одночасно мистецтво та наука. Найсучасніші алгоритми чи системи керування не можуть компенсувати неналежне встановлення, неправильне калібрування чи неадекватне тестування. Уникаючи 10 помилок, описаних тут, інженери можуть розкрити справжній потенціал IMU та створити системи, які виживуть – і процвітатимуть – в польових умовах.
У GuideNav ми пропонуємо широкий асортимент інерційних модулів (IMU), що складаються з високопродуктивних MEMS/волоконно-оптичних/міні-волоконно-оптичних гіроскопів та MEMS/кварцових акселерометрів , усі з яких відповідають суворим екологічним стандартам. Наша продукція розроблена для безпілотних літальних апаратів, морських систем, оборонних транспортних засобів та аерокосмічних платформ, де відмова неможлива. Якщо вам потрібен IMU, готовий до виконання завдань, наші експерти готові підтримати вас у процесі інтеграції.