Перш ніж БПЛА або безпілотна платформа розпочне свою місію, її інерціальна навігаційна система повинна налаштуватися відповідно до навколишнього середовища. Без належної ініціалізації навіть найкраща волоконно-оптична INS не зможе забезпечити надійне визначення курсу, положення або місцезнаходження. Процес може тривати лише кілька хвилин, але ініціалізація навігації є основою успіху місії.
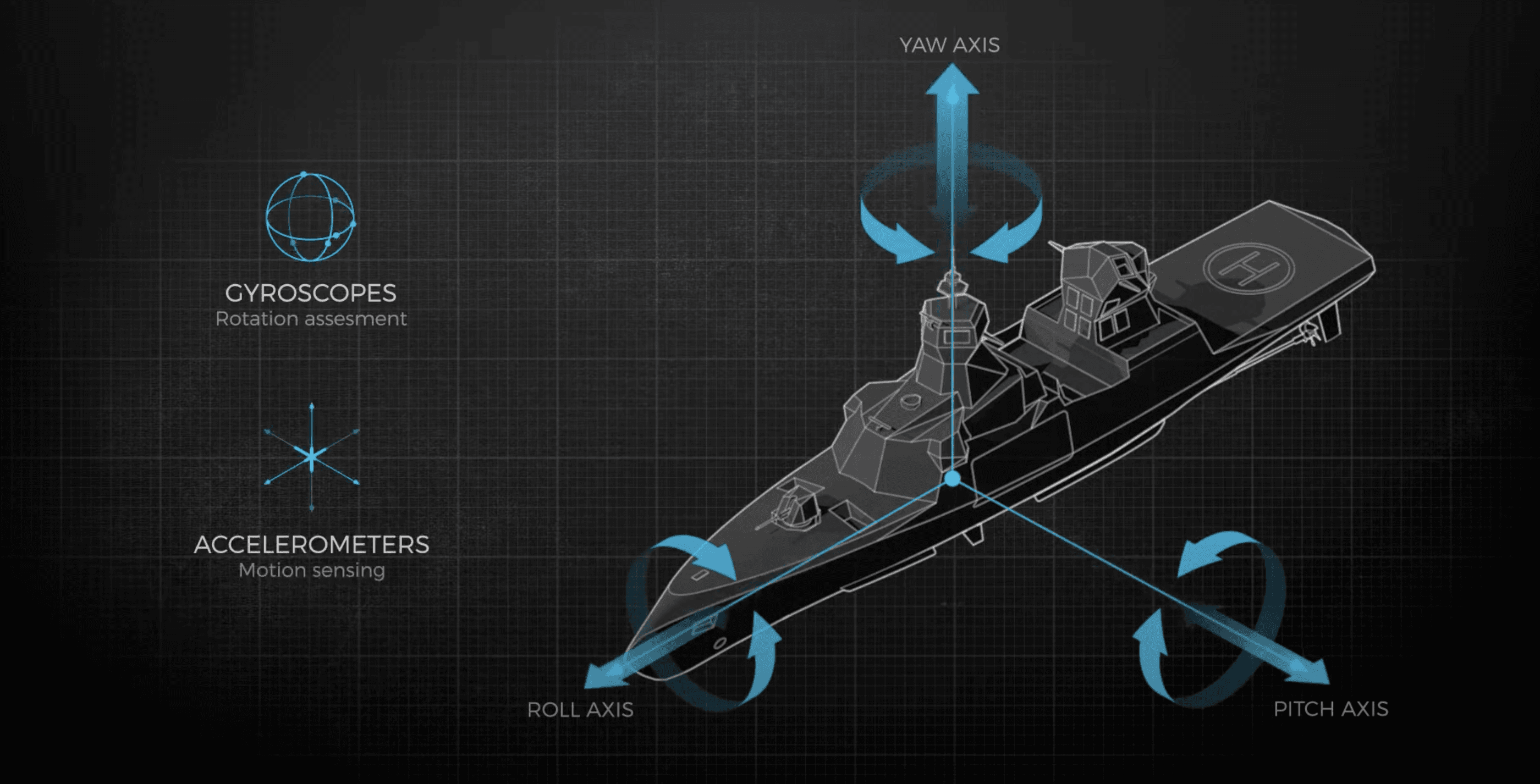
Волоконно-оптична ІНС ініціалізується перед злетом, стабілізуючи температуру, вирівнюючи гіроскопи та акселерометри, оцінюючи зміщення та виконуючи грубе та точне вирівнювання положення, забезпечуючи точну навігацію з першої секунди польоту.
Ініціалізацію часто недооцінюють, проте саме вона визначає, чи будуть навігаційні дані точними, чи вони будуть відхилятися з самого початку. Для БПЛА та інших автономних платформ процедура включає термічне кондиціонування, калібрування зміщення та вирівнювання положення . Кожен крок гарантує, що INS готовий до виконання завдання ще до того, як двигуни або ротори почнуть обертатися.
Зміст
Чому стабілізація температури є першочерговою?
Перш ніж розпочати будь-яке вирівнювання, волоконно-оптичний INS повинен досягти теплового балансу . Цей етап є критично важливим, оскільки коливання температури безпосередньо впливають на зміщення датчика та коефіцієнт масштабування. Його пропуск майже гарантує погану ініціалізацію.
- Гіроскопи та акселерометри дуже чутливі до температури → навіть невеликі зміщення можуть спотворювати показання.
- Потрібен розігрів → системі потрібен час для стабілізації, перш ніж можна буде отримати достовірні дані.
- Без стабілізації дрейф зміщення може збільшитися вдесятеро → що призведе до погіршення якості вирівнювання.
- Найкраща практика: увімкнути живлення за 10–20 хвилин до вильоту → забезпечити запуск INS зі стабільної базової лінії.
Як оцінюються зміщення під час ініціалізації?
Після того, як INS увімкнено та перебуває у нерухомому стані, він вимірює вихідні дані зі своїх гіроскопів та акселерометрів з часом. Ці показники використовуються для оцінки статичного зміщення , яке відображає властиву датчику похибку за відсутності руху. Навіть мікрорівневі зміщення, якщо їх не виправити, можуть накопичуватися у великі навігаційні помилки. Шляхом усереднення та моделювання сигналів протягом цієї фази, INS починає точне вирівнювання з чистими та надійними даними.
Що відбувається під час грубого вирівнювання?
Після теплової стабілізації та оцінки зміщення, волоконно-оптичний INS починає фазу грубого вирівнювання . На цьому етапі система ще не прагне досягти повної точності, а натомість зосереджується на створенні надійної першої оцінки своєї орієнтації. Спираючись на природні орієнтири – гравітацію та обертання Землі – INS може встановити базову лінію для тангажу, крену та курсу. Цей процес є фундаментальним, оскільки без надійного грубого вирівнювання точне вирівнювання не може правильно зійтися .
- Гравітація від акселерометрів → забезпечує тангаж і крен.
- Обертання Землі від гіроскопів → забезпечує курс.
- Процес триває кілька хвилин → забезпечує приблизне визначення базового рівня ставлення.
- Ця базова лінія потім уточнюється → формуючи основу для точного вирівнювання.
Як досягається точне вирівнювання?
Після того, як грубе вирівнювання забезпечує відправну точку, система переходить до точного вирівнювання , де точність поступово покращується. На цьому етапі волоконно-оптична INS застосовує розширену фільтрацію — часто фільтр Калмана — для об'єднання вихідних даних датчиків та зменшення залишкових помилок. Точне вирівнювання постійно уточнює курс, тангаж та крен , зменшуючи невеликі відхилення, що залишаються після грубого вирівнювання. З кожним циклом INS наближається до точності навігаційного рівня , гарантуючи, що коли БПЛА нарешті розпочне свою місію, його орієнтація буде стабільною та надійною.
Чому INS має залишатися нерухомим?
Під час ініціалізації INS повинен відокремлювати природні опорні сигнали — силу тяжіння та обертання Землі — від будь-якого фактичного руху платформи. Якщо БПЛА рухається під час цього процесу, показання датчиків спотворюються, що призводить до неточної оцінки зміщення та неправильного вирівнювання. Тому для забезпечення надійної ініціалізації критично важливо підтримувати систему в абсолютно нерухомому стані.
Ключові моменти, які слід пам'ятати:
- Рух створює хибні сигнали , які система може неправильно інтерпретувати як частину вирівнювання.
- Стаціонарні умови дозволяють оцінити справжню зміщення , створюючи чистішу модель для корекції дрейфу.
- Будь-яка вібрація або рух можуть затримати або пошкодити ініціалізацію , що призведе до збільшення часу збіжності.
Як засоби GNSS покращують ініціалізацію?
ГНСС може значно пришвидшити процес вирівнювання, надаючи інформацію про абсолютне положення та швидкість. У поєднанні з волоконно-оптичним INS ці зовнішні дані скорочують час, необхідний для досягнення повної точності навігації.
| За допомогою ГНСС | Без допомоги ГНСС |
|---|---|
| Вирівнювання сходиться набагато швидше, часто за кілька хвилин. | Вирівнювання спирається лише на інерційні датчики, тому для стабілізації потрібно більше часу. |
| Точність курсу швидко покращується, особливо під час точного вирівнювання. | Похибки курсу можуть залишатися більшими, поки не мине достатньо часу. |
| Ідеально підходить для швидкого розгортання місій БПЛА. | Підходить для операцій, де немає сигналу ГНСС, але вимагає терпіння. |
Які ризики поганої ініціалізації?
Коли ініціалізація виконана неправильно, помилки проникають у навігаційне рішення з самого початку. Ці проблеми можуть залишатися прихованими спочатку, але вони можуть серйозно вплинути на виконання місії після підйому БПЛА.
- Помилки курсу → призводять до неправильних навігаційних шляхів та сумарного дрейфу.
- Відхилення від маршруту → БПЛА можуть відхилятися від запланованих траєкторій польоту, що потребує частих коригувань.
- Залежність від ГНСС → послаблює надійність у середовищах, де ГНСС відмовлено.
- Збільшений час конвергенції → втрата робочого часу та енергії.
- Зниження впевненості → оператори не можуть повністю довіряти навігаційному рішенню.
Останній крок перед польотом
Уявіть собі передпольотну ініціалізацію як тихий зворотний відлік перед запуском ракети. Зовні нічого драматичного не відбувається, проте кожен датчик, кожен алгоритм і кожна схема всередині оптоволоконної системи INS влаштовуються на свої місця. Якщо пропустити зворотний відлік, запуск ризикує провалитися; поважайте його, і місія розпочнеться з упевненістю.
Для операторів БПЛА це означає, що їм ніколи не потрібно поспішати з розминкою, оцінкою зміщення чи вирівнюванням. Кожен крок невидимий для ока, але критично важливий для точності в повітрі. Винагорода проста: менше несподіванок, швидше зближення та навігаційна система, якій можна довіряти, коли GNSS недоступна.
У GuideNav ми розробляємо наші волоконно-оптичні INS-пристрої для підтримки цієї дисципліни завдяки швидкому розігріву, надійним самотестуванням та надійним алгоритмам вирівнювання . Дотримуйтесь правильних кроків, поєднуйте їх із правильною технологією, і ваш БПЛА завжди буде готовий до майбутніх викликів.
