Теоретично, інерційний вимірювальний блок (IMU) може виконувати одометрію — вимірювання відстані, яку пройшов транспортний засіб, шляхом інтегрування його прискорення та кутової швидкості з плином часу. Однак насправді така «виключно інерційна одометрія» є непрактичною. Проблема полягає в накопиченні похибок : навіть незначні зміщення датчиків викликають дрейф положення, який зростає експоненціально з часом. Протягом кількох секунд розрахована траєкторія сильно відхиляється від реальності.
Для автономного водіння та робототехніки, де точність локалізації повинна залишатися в межах сантиметрів, сам по собі IMU просто не може забезпечити надійну одометрію.
Теоретично, IMU може обчислювати одометрію за допомогою подвійного інтегрування, але зміщення та шум призводять до її експоненціального зсуву з часом. Тому реальні навігаційні системи покладаються на об'єднання IMU з GNSS, LiDAR або камерами для підтримки точності та стабільності.
Інерціальна навігація звучить просто — вимірювати рух і обчислювати відстань. Але на практиці навіть невеликі похибки датчиків швидко зростають і знижують точність. Інерціальний модуль навігації (IMU) є важливою частиною кожної навігаційної системи, але він не може працювати сам по собі. У цій статті пояснюється, чому чиста одометрія IMU не працює і як об'єднання датчиків перетворює її на надійний інструмент для точного позиціонування.

Зміст
Чому IMU теоретично може виконувати одометрію
Інерційний вимірювальний блок (IMU) вимірює тривісне прискорення та тривісну кутову швидкість .
Завдяки безперервній інтеграції цих сигналів система теоретично може обчислювати:
- Орієнтація (положення): шляхом інтегрування кутової швидкості.
- Швидкість: шляхом інтегрування лінійного прискорення.
- Положення: шляхом ще одного інтегрування швидкості.
Це фундаментальний принцип інерціальної навігаційної системи (INS) – автономного методу навігації, який спирається виключно на датчики руху. В ідеальному випадку з ідеально каліброваними датчиками та відсутністю шуму, IMU міг би безперервно визначати рух транспортного засобу та оцінювати його траєкторію відносно початкової точки. Ось чому, теоретично, IMU може виконувати одометрію без будь-якого зовнішнього посилання.
Чому це не працює на практиці: проблема накопичення помилок
Хоча теорія має сенс, кожен інерційний модуль (ІМУ) страждає від властивих датчикам помилок . Ці невеликі зміщення та шуми різко посилюються під час процесу подвійного інтегрування , який перетворює прискорення в положення. З часом навіть крихітні недосконалості викликають великий і швидко зростаючий дрейф.
Похибка позиціонування зростає квадратично з часом
Якщо акселерометр містить невелике постійне зміщення b a (м/с²), накопичені похибки швидкості та положення збільшуються з часом як:
Це означає, що похибка позиціонування зростає пропорційно квадрату часу . Навіть незначне зміщення може призвести до різкого дрейфу.
Наприклад, припустимо, що зміщення акселерометра b становить 0,01 м/с² — дуже типове значення для MEMS IMU комерційного класу.
| Час | Помилка позиції |
|---|---|
| 1 с | 0,005 м |
| 10 с | 0,5 м |
| 30 с | 4,5 м |
| 60 с | 18 м |
Всього через одну хвилину (60 с) роботи розрахункова похибка позиціонування може сягати близько 18 метрів , що значно перевищує точність локалізації, необхідну для автономного водіння ( зазвичай < 0,1–0,3 м ).
Зміщення гіроскопа викликає дрейф орієнтації
Невелике зміщення гіроскопа може здаватися незначним, але з часом воно призводить до помітних помилок оцінки положення . Після того, як орієнтація зміщується, IMU більше не може правильно відокремити гравітацію від справжнього руху — він не може «видалити гравітацію» з даних акселерометра. Коли це трапляється, частина вектора гравітації помилково трактується як горизонтальне прискорення , через що система вважає, що транспортний засіб рухається, навіть коли він нерухомий. Це хибне прискорення продовжує інтегруватися в хибну швидкість і зрештою призводить до вибухового дрейфу положення .
Інші джерела помилок
Окрім упередженості, на реальні інерційні модулі (ІМУ) впливають численні джерела помилок, які з часом посилюються:
| Джерело помилки | Вплив |
|---|---|
| Похибка масштабного коефіцієнта | Неправильне масштабування вимірювань прискорення або кутової швидкості. |
| Нерівність | Неортогональні осі датчика призводять до похибок проекції. |
| Температурний дрейф | Зміщення змінюється з температурою, погіршуючи калібрування. |
| Вібраційний шум | Механічний шум інтегрується у дрейф положення. |
| Початкова помилка вирівнювання | Невеликі помилки у початковому настрої призводять до довгострокових відхилень. |
Навіть невеликі недоліки, разом узяті, призводять до швидкого розбіжного навігаційного виходу. На практиці, чисто інерційна одометрія стає непридатною для використання протягом кількох секунд , навіть для високоякісних датчиків.
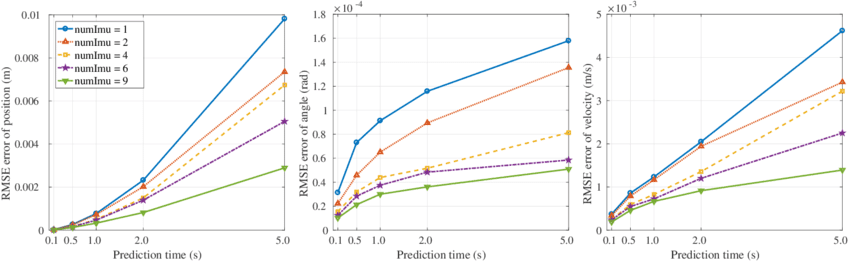
Оцінка точності: як довго може тривати одометрія лише за допомогою IMU
Навіть із вдосконаленими датчиками, інерційна одометрія може залишатися точною лише короткий період, перш ніж вийти з-під контролю. Оскільки похибка позиціонування зростає квадратично з часом, тривалість надійної роботи головним чином залежить від нахилу інерційного блоку (IMU) та його стабільності зміщення.
| Клас IMU | Типова упередженість | Похибка позиціонування (10 с) | Похибка позиціонування (60 с) | Практичне використання |
|---|---|---|---|---|
| Споживчий клас | > 0,01 м/с² | > 0,5 м | > 18 м | Абсолютно непридатний для використання |
| Промисловий клас | ~ 0,001 м/с² | ~ 5 см | ~ 1,8 м | Використовується лише для коротких тестів |
| Ступінь навігації | < 0,0001 м/с² | ~ 0,5 см | ~ 18 см | Точний протягом кількох секунд; все ще потребує злиття |
| Тактичний ранг | Надзвичайно низький | Керований | Кілька метрів | Використовується для військової/аерокосмічної промисловості; висока вартість |
Навіть найпотужніші інерційні модулі (ІМУ) не можуть уникати дрейфу назавжди. Саме тому сучасні автономні системи завжди покладаються на об'єднання даних датчиків — поєднання даних ІМУ з ГНСС, лідаром або візуальними даними — для підтримки довгострокової точності та стабільності.
Роль IMU в сучасній навігації - об'єднання сенсорів в основі
Хоча інерційний модуль (IMU) не може самостійно виконувати одометрію, він відіграє незамінну роль у сучасній навігації. Замість того, щоб бути основним джерелом позиціонування, він діє як високочастотна основа, яка покращує та стабілізує інші датчики.
Оцінка високочастотного руху
IMU працюють на сотень до тисяч герц , що набагато швидше, ніж GNSS, LiDAR або камери.
Така висока частота оновлення дозволяє їм фіксувати швидкий рух і заповнювати прогалини між повільнішими датчиками, забезпечуючи плавне та безперервне відображення руху для всієї навігаційної системи.
Короткострокове прогнозування та згладжування
Коли сигнали GNSS втрачаються — у тунелях, під мостами або в щільних міських районах — IMU забезпечує короткочасне обчислення траєкторії для підтримки безперервної траєкторії.
Він прогнозує стан системи (положення, швидкість, орієнтацію) протягом кількох секунд, забезпечуючи плавні переходи, доки зовнішні вимірювання знову не стануть доступними.
Ця здатність мосту робить IMU необхідним для надійної навігації в середовищах, де немає GNSS .
Основа сенсорного синтезу
У сучасній локалізації IMU виступає динамічним ядром багатосенсорних систем об'єднання даних. Його високошвидкісні інерційні дані забезпечують безперервну інформацію про рух, тоді як низькошвидкісні, але без дрейфу вимірювання з інших датчиків, таких як GNSS, LiDAR або камери, постійно виправляють накопичені помилки, забезпечуючи стабільність і точність навігації.
| Метод злиття | Комбінація датчиків | застосування |
|---|---|---|
| Слабке або щільне зчеплення GNSS/IMU | RTK-GNSS + ІМУ | Високоточна наземна або повітряна навігація |
| Візуально-інерційна одометрія (VIO) | Камера + ІМУ | SLAM, БПЛА, робототехніка |
| LiDAR-інерційна одометрія (LIO) | ЛіДАР + ІМУ | Автономне водіння, картографування |
| Граф факторів або злиття фільтрів Калмана | Кілька датчиків + IMU | Інтегрована оцінка стану |
Висновок
Теоретично, IMU може сам по собі оцінити рух, але на практиці його похибки зростають занадто швидко, щоб бути корисними. Навіть незначні зміщення швидко призводять до зсуву положення на кілька метрів протягом кількох секунд.
Тим не менш, IMU залишається важливим — він надає високочастотні дані про рух, які інші датчики не можуть. У поєднанні з GNSS, LiDAR або камерами він стає основою стабільної та точної навігаційної системи.
