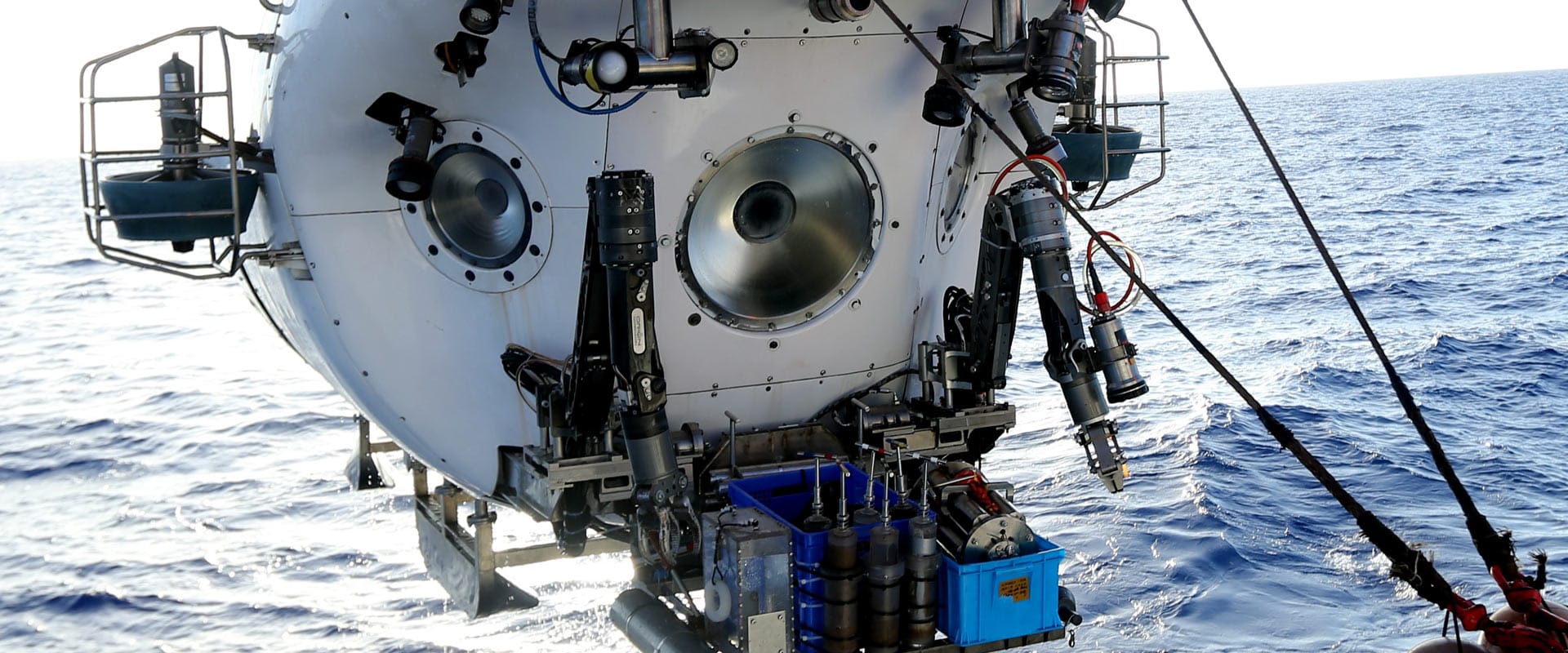
Підводна навігація невблаганна. Без сигналів GPS підводні апарати повністю покладаються на інерційні датчики для відстеження свого положення. Невеликий дрейф за хвилину може накопичуватися в кілометри похибки протягом тривалих місій. Для операторів, які складають карти трубопроводів або досліджують глибокі води, такі відхилення можуть означати марні місії, вищі витрати та загрозу безпеці. Ось чому вибір між волоконно-оптичними гіроскопами (ВОГ) та MEMS IMU є настільки критичним.
Гіроскопи FOG підтримують наднизький дрейф та довготривалу стабільність в підводних умовах відсутності GNSS, тоді як MEMS IMU пропонують компактні альтернативи з низьким енергоспоживанням, які краще підходять для короткочасних інспекцій та економічно чутливих платформ.
Суперечка між системами керування відкритим і відкритим контуром (FOG) та MEMS полягає не в тому, яка технологія новіша, а в тому, яка з них дійсно витримує суворі реалії підводної навігації. Порівнюючи їхні характеристики за точністю, стійкістю до навколишнього середовища, вібростійкістю, перехідними налаштуваннями (SWaP) та факторами життєвого циклу, ми можемо виявити, де кожна технологія перевершує інших, а де їй бракує. Така структурована перспектива допомагає операторам підібрати правильний датчик для правильної підводної місії.
Зміст
Точність та дрейф під час тривалих місій: який датчик працює краще?
Продуктивність FOG
Датчики FOG використовують ефект Саньяка для вимірювання кутової швидкості, незалежно від механічних частин. Ця конструкція забезпечує надзвичайно низькі швидкості дрейфу , часто <0,05 °/год, що робить їх дуже стабільними для місій тривалістю 6–10 годин або більше. Під час підводного картографування або інспекції трубопроводів автономні автономні апарати (АНПА), оснащені FOG, підтримують надійні оцінки курсу без постійних зовнішніх оновлень, забезпечуючи точність дослідження та ефективність місії.
Продуктивність МЕМС
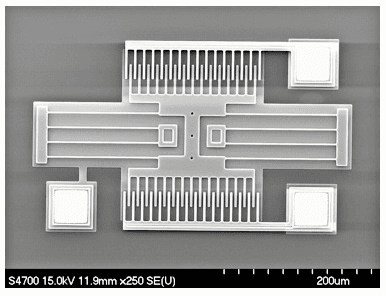
MEMS-гіроскопи вимірюють обертання за допомогою вібруючих структур. Незважаючи на покращення, їхня нестабільність зміщення все ще знаходиться в діапазоні 1–10 °/год , що призводить до значних кумулятивних помилок в середовищах, де немає GNSS. MEMS-пристрої можуть виконувати короткі занурення або інспекційні завдання тривалістю менше однієї години, але при тривалому накопиченні дрейфу потрібна часта корекція за допомогою DVL, USBL або акустичних маяків. Ця залежність обмежує автономність у глибоководних операціях.
Порівняння
FOG : Неперевершена стабільність, підходить для тривалих досліджень.
MEMS : Підходить лише для місій короткої дальності та обмеженого часу.
Висновок : FOG – найкращий вибір, коли точність з плином часу є критично важливою.
Екологічна стійкість: яка технологія витримує підводний тиск і екстремальні температури?
Стійкість FOG
У FOG використовуються оптичні котушки та твердотільна електроніка, що робить їх за своєю суттю стійкими до тиску, солоності та широких температурних коливань . Оскільки відсутні вібраційні структури, тиск на глибині мінімально впливає на продуктивність. Температурний дрейф передбачуваний і може бути компенсований на заводі, що забезпечує стабільну точність курсу навіть в арктичних або тропічних водах.
Надійність MEMS
MEMS-сенсори побудовані на кремнієвих мікроструктурах, які чутливі до теплового розширення, напружень та коливань тиску . Підводні умови, особливо швидкі зміни температури або висока солоність, можуть погіршити їхню стабільність зміщення та лінійність масштабного коефіцієнта. Алгоритми компенсації та інкапсуляція допомагають, але MEMS зазвичай вимагає активного перекалібрування, коли умови навколишнього середовища змінюються.
Порівняння
FOG : Більш стійкий до тривалого впливу підводного середовища.
МЕМС : Чутливі до впливу навколишнього середовища, потребують частої корекції.
Висновок : FOG залишається надійним варіантом для глибоководних місій, тоді як MEMS підходить для мілководних або контрольованих середовищ.

Вібрація та удари: який датчик зберігає стабільність при динамічних навантаженнях?
Стабільність FOG
Гіроскопи типу FOG, які не мають рухомих механічних частин, за своєю суттю менш чутливі до помилок, викликаних вібрацією. На підводних платформах, таких як автономні підводні апарати (АНПА), що працюють поблизу донних течій, або інструменти для обробки дистанційних підводних апаратів (ДУП), гіроскопи типу FOG підтримують стабільні вихідні сигнали навіть за постійних мікровібрацій або раптових ударів. Їхня оптична конструкція гарантує, що динамічні навантаження мають мінімальний вплив на зміщення та масштабний коефіцієнт, тому гіроскопи типу FOG довіряють системам протимінної боротьби на морі та шельфовому будівництві.
Стабільність MEMS
MEMS-датчики, незважаючи на свою міцну мікророзмірну конструкцію, за своєю суттю більш вразливі до вібраційного шуму та ударів . Вібруючі конструкції можуть вловлювати небажані частоти, що призводить до хибних показників кутової швидкості або тимчасової нестабільності вихідного сигналу. Хоча методи демпфування та фільтрації покращують продуктивність, MEMS-гіроскопи часто потребують ретельної обробки сигналів, щоб залишатися придатними для використання в середовищах з високою вібрацією, таких як підводні дрони з двигунами.
Порівняння
- FOG : Забезпечує стабільні показники за умов вібрації та раптових ударів, мінімізуючи поширення похибки.
- МЕМС : Легкі, але схильні до вібраційного шуму, що потребують ретельної фільтрації.
- Висновок : Для платформ, що піддаються впливу турбулентності, вібрації, викликаної гвинтом, або роботи підводного інструменту, FOG явно забезпечує більш стабільне та безпечне для виконання завдання рішення.
Розмір, вага та потужність: який датчик підходить для платформ з обмеженими можливостями SWaP?
Характеристики FOG SWaP
Датчики вільного простору (ВОГ) традиційно оснащені більшими оптичними котушками та вищими вимогами до живлення . Навіть з урахуванням нещодавньої мініатюризації, ВОГ тактичного класу може важити кілька сотень грамів і споживати кілька ват енергії. На невеликих автономних підводних апаратах (АНПА) або дистанційних підводних апаратах (ДУП) з обмеженим запасом енергії це може зменшити довговічність або вантажопідйомність. Однак для підводних апаратів середнього та великого масштабу компроміс між розміром і потужністю часто виправдовується неперевершеною точністю та стабільністю.
Характеристики MEMS SWaP
MEMS-імпульсні модулі (IMU) за своєю суттю компактні, легкі та енергоефективні . Багато тактичних MEMS-пристроїв важать менше 50 грамів і працюють з енергоспоживанням менше 1 вата. Це робить їх ідеальними для невеликих інспекційних дронів, портативних навігаційних пристроїв для водолазів або корисних навантажень, де кожен грам і міліампер мають значення. Їхні невеликі розміри дозволяють інтегрувати їх у тісні корпуси, що забезпечує гнучке проектування транспортних засобів.
Порівняння
- FOG : Громіздкіший та енергоємніший, найкраще підходить для платформ з достатнім простором та енергетичними витратами.
- MEMS : Оптимізовано для систем з обмеженнями SWaP, що дозволяє створювати легкі та енергоспоживаючі конструкції.
- Висновок : Коли компактність та ефективність є головними пріоритетами, MEMS є природним вибором; для місій, де точність ставить пріоритет над довговічністю, FOG залишається еталоном.

Інтеграція з підводними засобами: який датчик найкраще працює з DVL та USBL?
Інтеграція FOG
Гіроскопи FOG забезпечують високостабільну опорну напругу , що значно покращує продуктивність доплерівських каротажів швидкості (DVL), акустичних систем з надкороткою базовою лінією (USBL) та довгою базовою лінією (LBL). Оскільки вихідні дані FOG залишаються точними з часом, допоміжні датчики можуть оновлюватися рідше, зменшуючи помилки навігації навіть тоді, коли акустичні сигнали переривчасті або частково блокуються. Ця синергія робить рішення INS на основі FOG стандартом для автономних підводних апаратів геодезичного класу та підводних місій тривалої дії.
Інтеграція MEMS
MEMS-імпульсні модулі (IMU) більше залежать від зовнішніх допоміжних засобів через їх вищий дрейф та нестабільність зміщення . Хоча вони легко інтегруються з DVL та USBL завдяки своїй легкій та зручній для цифрових технологій конструкції, часта потреба в корекціях збільшує залежність системи від акустичних оновлень. У шумних середовищах або середовищах зі зниженим рівнем сигналу навігація на основі MEMS може демонструвати стрибки або погіршену якість позиціонування, якщо вона не підкріплена вдосконаленими алгоритмами об'єднання датчиків.
Порівняння
- FOG : Забезпечує стабільну основу для підводних допоміжних систем, зменшуючи залежність від частих коригувань.
- MEMS : Легко інтегруватися, але вимагає постійних зовнішніх оновлень для компенсації дрейфу.
- Висновок : Для місій, де акустичні оновлення можуть бути ненадійними, FOG є безпечнішим варіантом; MEMS може бути достатньо, коли зовнішня допомога гарантована та часта.
Від стійкості до дрейфової стійкості, стійкості до вібрацій, SWaP та системної інтеграції, порівняння на даний момент чітко показує, що FOG загалом перевершує MEMS у складних підводних умовах, тоді як MEMS залишається практичним вибором для легших та коротших місій.
Однак, сама лише продуктивність не визначає правильне рішення. Вартість, вимоги до обслуговування, якість даних та перевірені застосування є однаково вирішальними факторами при виборі датчика для підводних платформ. У частині II ми продовжимо це дослідження, розглянувши економіку життєвого циклу, обслуговування, надійність картографування та реальні випадки використання, перш ніж дійдемо остаточного рішення щодо того, яка технологія краще працює під водою.
