У частині 1 ми розібрали, що таке ARW і чому воно непомітно керує надійністю будь-якої системи на основі IMU. Але знання того, як працює ARW, цінне лише тоді, коли ви можете проектувати навколо нього. Ця друга частина зосереджена на практичному аспекті: як ARW впливає на реальну навігацію БПЛА, що може і не може робити програмне забезпечення, і як я оцінюю датчики, коли відмова неможлива.
Кутове випадкове блукання (ARW) встановлює граничну межу точності IMU . Його неможливо усунути програмно, його можна лише зменшити за допомогою вибору датчиків з низьким рівнем шуму, стабільної теплової конструкції, віброізоляції та ефективних стратегій об'єднання кількох датчиків.
Ось чому в цій частині я розповім вам, як ARW проявляється в реальних операціях БПЛА, чому саме програмне забезпечення не може його скасувати, і які практичні рішення щодо вибору датчиків, теплового управління, механічної ізоляції та синтезу можуть мати вирішальне значення для успіху місії та її невдачі.
Зміст
Як ARW впливає на навігацію БПЛА?
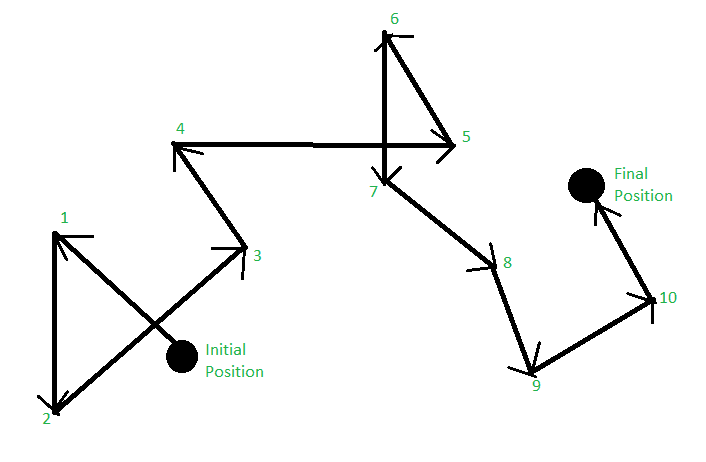
Уявіть собі: ви летите на безпілотнику з фіксованим крилом через каньйон без сигналу GNSS. Автопілот повністю покладається на ваш інерційний модуль керування (IMU), щоб підтримувати положення та стабільну траєкторію польоту. Протягом перших кількох хвилин все виглядає стабільно. Але потім орієнтація починає зміщуватися — спочатку повільно, потім швидше. БПЛА починає відхилятися, система утримання висоти починає збиватися, і ви втрачаєте орієнтир. Що сталося?
Це ARW у дії. Навіть за відсутності руху, температурних градієнтів та вібрації, інтегрований кутовий шум непомітно знижує вашу впевненість у тангажі, крені та курсі . Щойно дрейф, викликаний ARW, перевищує пороги керування польотом, жодне налаштування PID-регулятора чи згладжування не зможе врятувати платформу.
У власних конструкціях БПЛА я розглядаю ARW як бюджет навігаційного часу . Гіроскоп MEMS з 0,2°/√h може забезпечити вам 10–15 хвилин корисної стабільності в зоні, де немає GNSS. Тактичний MEMS з 0,05°/√h розширює це вікно. FOG (зона видимості, простору та простору) дає вам години. Різниця полягає не лише в продуктивності, а в тому, чи може місія взагалі відбутися .
Чи можна компенсувати ARW програмним забезпеченням?
Це пастка, яку я бачу надто часто: команда стикається з дрейфом орієнтації та вважає, що його можна виправити в прошивці. Вони додають більше фільтрів, збільшують налаштування посилення Калмана або об'єднують шари датчиків — але дрейф не зникає . Тому що те, з чим вони борються, — це не помилка коду чи неправильна конфігурація об'єднання, а фізика.
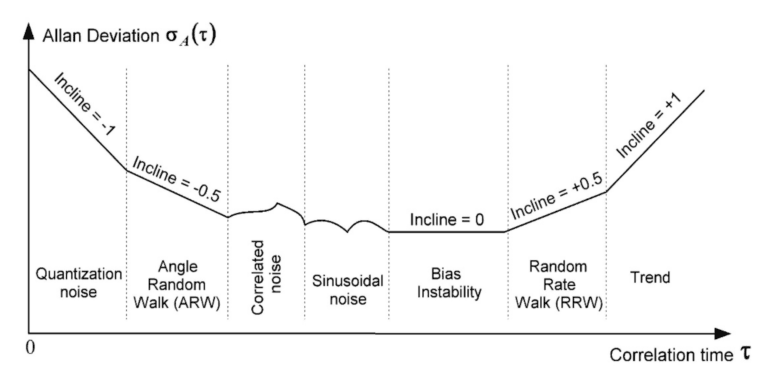
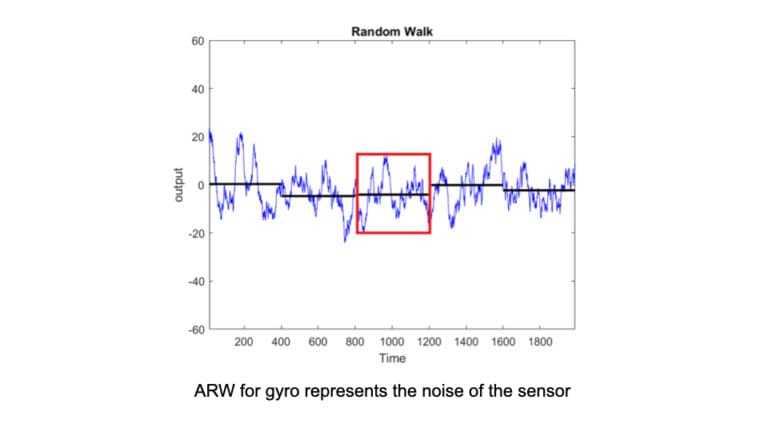
ARW не є зміщенням і не зміщенням, а незменшуваним шумом. Він не стабілізується з часом і не усереднюється, як повільний тепловий дрейф. Він знаходиться в основі кожного виходу гіроскопа, вносячи невизначеність у ваше інтегрування, починаючи з другого.
Так, злиття даних допомагає. Оновлення GNSS можуть скинути зсув курсу. Системи зору або LiDAR можуть закріпити положення. Але коли вони зникають, скажімо, в тунелі або під впливом глушіння, ваша система повертається до необробленого IMU , і в цей момент ARW стає годинником зворотного відліку. Якщо власний шум датчика занадто високий, жодні програмні трюки вас не врятують.
Я кажу командам: ви можете фільтрувати ефекти ARW, але не можете їх стерти. Якщо вашій платформі потрібно літати, прицілюватися або стабілізуватися без зовнішньої корекції більше кількох хвилин, вибирайте гіроскоп з урахуванням цього — або проектуйте його на відмову.
Як інженери мінімізують ARW під час проектування систем?
Ви не можете повністю позбутися ARW, але ви можете розробити систему з урахуванням її розумних характеристик . Кожна система, яку я поставив з надійною інерційною продуктивністю, починалася з цього питання: «Наскільки низьким має бути мій ARW і який найрозумніший спосіб його досягти?» Ось як я до цього підходжу:
- Вибір датчика – це понад усе. Якщо ваш бюджет на ARW обмежений, жоден алгоритм не врятує дешевий MEMS-гіроскоп. Почніть з пристрою ARW з найнижчим значенням, який відповідає вашому обсягу, потужності та бюджету. З мого досвіду, саме це рішення визначає 80% якості системи.
- Термічна стабільність важливіша, ніж люди думають. Добре специфікований гіроскоп все ще може зазнавати зростання шуму з підвищенням температури. Я бачив, як значення ARW подвоюються за поганої теплоізоляції. Стабільна теплова маса або помірне активне керування мають реальне значення.
- Механічна ізоляція зменшує ефективний шум. Вібрація вводить широкосмугову енергію в сигнальний шлях датчика, частина якої інтерпретується як кутовий рух. М'які кріплення або налаштовані ізолятори не знизять саму ARW, але вони знизять те, що система сприймає як ARW.
- Злиття даних з датчиків розширює ваш часовий горизонт. ГНСС, магнітометри, барометри, візуальна одометрія — усі вони допомагають, але лише за умови належного контролю їхньої власної невизначеності. Я розглядаю злиття не як латку для поганих інерційних модулів (ІМУ), а як множник для хороших.
Ключовий висновок? ARW визначає нижню межу. Все інше будується на ній. Якщо ваш датчик шумний по своїй суті, кожен шар зверху — фільтри, оцінювачі, об'єднання — успадкує цю невизначеність.
На що слід звертати увагу у застосуванні, чутливому до ARW?
Коли ви обираєте інерційний модуль (ІМУ) для критично важливої платформи, ви обираєте не просто специфікацію, а й часові рамки відмов. ARW показує, як довго ваша система може літати, керувати, цілитися або стабілізуватися без зовнішньої корекції, перш ніж невизначеність візьме гору. Ось чому я розглядаю ARW як визначальну змінну при виборі ІМУ.
Ось як я це оформлюю:
- Якщо вікно падіння сигналу GNSS менше 5 хвилин , і вам потрібна лише приблизне орієнтування, промислові MEMS (0,1–0,5°/√h) можуть спрацювати. Просто очікуйте, що ваш фільтр буде боротися з дрейфом весь час.
- Якщо ваша платформа повинна залишатися стабільною протягом 10–20 хвилин , як у випадку з БПЛА розвідувальних систем або оптичними системами, встановленими на транспортних засобах, тактичні MEMS з ARW у діапазоні 0,05°/√h – це ваш мінімальний варіант. Я ніколи не використовую тут датчики споживчого класу – без винятків.
- Якщо вам потрібна довіра на рівні години — морська навігація, залізничні системи, повітряна зброя — FOG більше не є необов'язковим. Вам знадобиться ARW нижче 0,01°/√год, і, що ще важливіше, узгодженість і стійкість до навколишнього середовища, які забезпечує архітектура FOG.
У кожному огляді дизайну, який я проводжу, я запитую: «Що відбувається, коли зовнішні посилання зникають?» Якщо відповідь «ми деградуємо повільно та передбачувано», то це ARW виконує свою роботу. Якщо відповідь «ми втрачаємо роботу менш ніж за 3 хвилини», то ви вибрали неправильний IMU.
ARW як орієнтир для вибору правильного IMU
Кутове випадкове блукання (ARW) – це не просто число, заховане в технічному описі, це орієнтир, який визначає, чи можна довіряти IMU у критично важливих застосуваннях. Інженери в оборонній, аерокосмічній та морській галузях знають, що низьке ARW – це різниця між системами, які дрейфують протягом кількох хвилин, та системами, які залишаються стабільними протягом годин або навіть днів.
У GuideNav ми зосереджуємося саме на цьому еталоні. Наші IMU та навігаційні системи на основі FOG розроблені з провідною в галузі продуктивністю ARW, що забезпечує точність в середовищах без GNSS, довговічні БПЛА та платформи високої стабілізації. Незалежно від того, чи потрібна вам компактна ефективність тактичних MEMS, чи неймовірна стабільність FOG навігаційного класу, GuideNav пропонує рішення, адаптовані до вимог успіху місії.
