
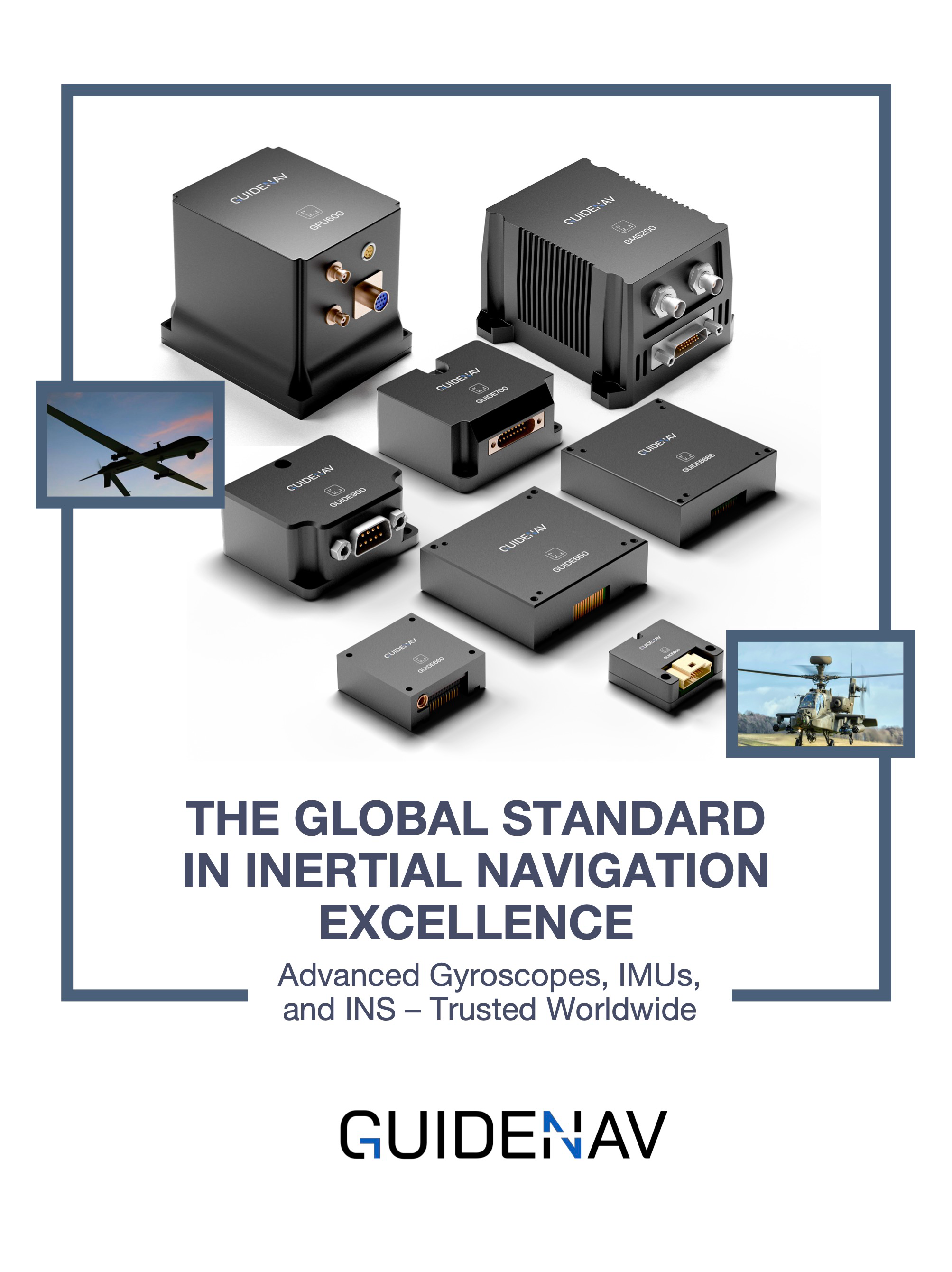
Наш інерційний вимірювальний блок на базі MEMS
Інерційний вимірювальний блок MEMS
Понад 15 000 систем працюють у понад 35 країнах
Індивідуальні рішення, яким довіряють ключові світові гравці
Інерціальний вимірювальний блок (IMU) MEMS від GuideNav є вершиною точності та надійності. Розроблені для забезпечення виняткової продуктивності, наші IMU забезпечують точні вимірювання кутової швидкості та лінійного прискорення, що є критично важливим для навігаційних та керуючих систем в аерокосмічній, оборонній та промисловій галузях.
Модель інерційного вимірювального блоку MEMS від Guidenav
ВИСОКОТОЧНІ
МОДЕЛІ MEMS IMU
Як провідний виробник інерціальних вимірювальних пристроїв MEMS, GuideNav пропонує повний асортимент високоточних інерціальних вимірювальних пристроїв MEMS, розроблених для задоволення різноманітних потреб різних галузей промисловості, від аерокосмічної та оборонної до промислової автоматизації та робототехніки. Наші рішення включають як стандартні, так і індивідуальні IMU, адаптовані до ваших конкретних потреб.
Ми також пропонуємо безперешкодні варіанти заміни ваших існуючих систем, забезпечуючи сумісність з вашими поточними інтерфейсами без будь-яких проблем з інтеграцією. Просто зв'яжіться з нашими експертами, щоб обговорити детальні специфікації та індивідуальні рішення для ваших проектів.
- Економічно ефективний
- Діапазон гіроскопа: ± 500 °/с
- Нестабільність зміщення: ≤ 2 °/год
- Стабільність зміщення: ≤ 10°/год
- Вага: ≤ 10 г
- Протокол: UART

- 10-осьовий MEMS IMU
- Діапазон гіроскопа: ± 450 °/с
- Нестабільність зміщення: ≤ 2°/год
- Стабільність зміщення: ≤ 4°/год
- Вага: ≤ 40 г
- Протокол: SPI
- 10-осьовий MEMS IMU
- Діапазон гіроскопа: ± 450 °/с
- Нестабільність зміщення: ≤ 0,8 °/год
- Стабільність зміщення: ≤ 3°/год
- Вага: ≤ 40 г
- Протокол: SPI

- Середньо-висока точність
- Діапазон гіроскопа: ± 320 °/с
- Нестабільність зміщення: ≤ 0,4 °/год
- Стабільність зміщення: ≤ 2°/год
- Вага: ≤ 10 г
- Протокол: RS422

- Широкий діапазон гіроскопів
- Діапазон гіроскопа: ± 2000 °/с
- Нестабільність зміщення: ≤ 3 °/год
- Стабільність зміщення: ≤ 10°/год
- Вага: ≤ 30 г
- Протокол: UART

- МІЦНІСТЬ до 20 000 г
- Діапазон гіроскопа: до 6000 °/с
- Нестабільність зміщення: ≤ 3°/год
- Стабільність зміщення: ≤ 10°/год
- Вага: ≤ 50 г
- Протокол: UART

- Висока точність
- Діапазон гіроскопа: ± 450 °/с
- Нестабільність зміщення: ≤ 0,2 °/год
- Стабільність зміщення: ≤ 1°/год
- Вага: ≤ 40 г
- Протокол: RS422

- Надвисока точність
- Діапазон гіроскопа: ± 400 °/с
- Нестабільність зміщення: ≤ 0,1 °/год
- Стабільність зміщення: ≤ 0,5°/год
- Вага: ≤ 55 г
- Протокол: RS422
Отримайте своє індивідуальне рішення зараз
Ваш проект заслуговує на рішення, адаптоване до ваших точних вимог. Щоб гарантувати, що ми надамо найкращі інерційні вимірювальні одиниці (IMU) для ваших потреб, ми запрошуємо вас поділитися конкретними параметрами та вимогами до продуктивності ваших застосувань. Чи то точність, стабільність чи обмеження розміру, наша команда готова допомогти вам знайти ідеальний варіант.
Зміст
Завантажте цю сторінку у форматі PDF
Щоб заощадити ваш час, ми також підготували PDF-версію, яка містить весь вміст цієї сторінки. Залиште лише свою електронну адресу, і ви одразу отримаєте посилання для завантаження.

Представляємо інерційний вимірювальний блок (IMU)
Що таке інерційна вимірювальна одиниця (IMU)
Інерціальний вимірювальний блок (IMU) – це вдосконалена сенсорна система, яка точно відстежує рух та орієнтацію об'єкта в тривимірному просторі. Вона поєднує кілька датчиків, зазвичай акселерометрів та гіроскопів, для вимірювання лінійного прискорення та кутової швидкості відповідно. У деяких конфігураціях також інтегровані магнітометри для отримання додаткових даних про орієнтацію відносно магнітного поля Землі.
Інерційні модулі (IMU) відіграють вирішальну роль у системах навігації та керування в різних важливих галузях промисловості, таких як аерокосмічна, оборонна та автономні системи. Надаючи високоточні дані про положення, швидкість та орієнтацію в режимі реального часу, IMU забезпечують стабільність і точність складних систем у динамічних умовах, забезпечуючи надійну роботу навіть у середовищах з високим рівнем вібрації, ударів або інших руйнівних сил.
ДІЗНАЙТЕСЯ ПРО Інерційний вимірювальний блок MEMS (MEMS IMU)
Як працює MEMS IMU?
MEMS IMU (інерційний вимірювальний блок) працює шляхом інтеграції кількох датчиків, зазвичай включаючи акселерометри та гіроскопи MEMS, для вимірювання руху та орієнтації. Акселерометр виявляє лінійне прискорення за трьома осями, тоді як гіроскоп вимірює обертальний рух навколо цих осей. Ці датчики збирають дані про положення, швидкість та орієнтацію об'єкта, які потім обробляються для забезпечення точної навігації та керуючої інформації в режимі реального часу. MEMS IMU компактні, енергоефективні та високоточні, що робить їх ідеальними для застосування в аерокосмічній, оборонній, робототехнічній та автономній галузях.
Інерційний вимірювальний блок проти гіроскопа (лише)
Навіщо використовувати складний MEMS IMU замість простого гіроскопа?
Хоча гіроскоп вимірює кутову швидкість, він страждає від дрейфу з часом і не може забезпечити абсолютне положення чи орієнтацію. IMU інтегрує акселерометри та магнітометри з гіроскопом для корекції дрейфу, забезпечення початкової орієнтації та надання комплексних 3D-даних про рух, забезпечуючи точне та надійне вимірювання положення з часом.
Корекція дрейфу : Тільки гіроскопи страждають від дрейфу з часом. IMU містить акселерометри та магнітометри для корекції цього дрейфу та підтримки точності.
Початкова орієнтація : гіроскоп не може забезпечити початкову орієнтацію, але інерційний модуль може, використовуючи акселерометри для визначення сили тяжіння та магнітометри для визначення курсу.
Комплексні 3D-дані руху : IMU вимірюють не лише обертання, але й лінійне прискорення, пропонуючи повну картину руху у трьох вимірах.
Підвищена точність : об'єднуючи дані з кількох датчиків, інерційний модуль (IMU) забезпечує точніші та надійніші вимірювання положення, особливо протягом тривалих періодів.


Процес виготовлення інерціального вимірювального блоку Mems
Процес виробництва MEMS IMU
01
КРОК 1: Налаштування клієнта та визначення параметрів
Визначити ключові параметри, такі як швидкість дрейфу, щільність шуму, температурний дрейф та лінійність, на основі конкретних вимог замовника до застосування. Забезпечити відповідність цих параметрів необхідної точності, стабільності та адаптивності до навколишнього середовища. Розробити та виготовити датчики MEMS, включаючи акселерометри та гіроскопи, та інтегрувати їх в єдиний модуль.
02
STPE 2: Проектування та інтеграція схем
Розробка та інтеграція схем обробки сигналів датчиків, включаючи посилення сигналу, фільтрацію та аналого-цифрове перетворення. Ці функції зазвичай інтегровані в ASIC або мікроконтролер для високорівневої інтеграції.
03
STPE 3: Автоматичне калібрування
Виконайте калібрування нульової точки, динамічне тестування та температурну компенсацію акселерометрів і гіроскопів за допомогою автоматизованої тестової платформи, щоб забезпечити точність і стабільність датчиків.
04
STPE 4: Упаковка та тестування
Компактно упаковуйте мікросхеми та схеми MEMS, а також проводите випробування на адаптивність до навколишнього середовища, такі як випробування на температуру, вібрацію та удари, щоб забезпечити надійність та продуктивність IMU за різних умов.


ДІЗНАЙТЕСЯ ПРО Інерційний вимірювальний блок MEMS (MEMS IMU)
Чи означає MEMS IMU «низьку точність»?
Не обов'язково. Хоча стандартні MEMS IMU зазвичай асоціюються з помірною точністю, високоточні MEMS IMU тактичного класу можуть досягати нестабільності зміщення до 0,1°/год (GUIDE900) , що можна порівняти з початковими IMU на основі волоконно-оптичного гіроскопа (FOG).
- Стандартні MEMS IMU : вони економічно ефективні та підходять для застосувань, де достатньо помірної точності, таких як побутова електроніка, промислова автоматизація та дрони.
- Високоточні MEMS IMU : Завдяки вдосконаленим процесам проектування та виробництва, деякі вдосконалені MEMS IMU тепер відповідають вимогам точності військового та аерокосмічного застосування. Вони можуть забезпечити надійну роботу в навігаційних системах, безпілотних літальних апаратах і навіть системах керованої оборони.
Однак важливо зазначити, що навіть високоточні MEMS IMU все ще мають обмеження щодо довготривалого дрейфу та надвисокої стабільності порівняно з FOG IMU, які краще підходять для критично важливих застосувань, що вимагають найменшого можливого дрейфу та найвищої точності.


Що краще: MEMS IMU та FOG IMU?
Волоконно-оптичний гіроскопічний IMU : залишається кращим вибором для високоточних застосувань, особливо там, де довготривала стабільність є критично важливою, наприклад, в аерокосмічній галузі, точній навігації та обороні. Незважаючи на більший розмір і вищу вартість, волоконно-оптичні гіроскопічні IMU відмінно працюють в екстремальних умовах навколишнього середовища.
MEMS IMU : Завдяки розвитку технологій, MEMS IMU досягли рівня точності, порівнянного з гіроскопами середнього діапазону FOG у багатьох сценаріях, і широко використовуються як у військовій, так і у високоточній цивільній галузях. Їхні переваги полягають у мініатюризації, низькому енергоспоживанні та універсальності в різних застосуваннях.
| Функція | ІМУ ВОГ | ІМУ МЕМС |
|---|---|---|
| Принцип дії | Вимірювання кутової швидкості на основі ефекту Саньяка в умовах волоконно-оптичної інтерференції | Вимірює прискорення та кутову швидкість за допомогою мікромеханічних структур у технології MEMS |
| Точність | Висока точність, ідеально підходить для вимогливих навігаційних та контрольних застосувань, особливо для довготривалої стабільності | Широкий діапазон точності; деякі високоякісні MEMS IMU досягли точності, порівнянної з гіроскопами середнього рівня FOG, що підходить для різних застосувань, включаючи військові сценарії |
| Швидкість дрейфу | Зазвичай має дуже низький коефіцієнт дрейфу, що підходить для тривалої безперервної роботи | Швидкість дрейфу значно покращилася завдяки технологічному прогресу; деякі моделі високого класу можуть конкурувати з інтенсивними датчиками повітряного потоку (ІМУ) |
| Розмір і вага | Більший та важчий, підходить для високоточних застосувань, де простір та вага не є обмеженнями | Компактний та легкий, ідеально підходить для застосувань з обмеженим простором, широко використовується в портативних пристроях та військових цілях |
| Споживання енергії | Вища споживана потужність, підходить для систем, де вимоги до живлення не є суттєвою проблемою | Низьке енергоспоживання, ідеально підходить для портативних пристроїв з живленням від батарей та тривалих місій |
| Вартість | Вища виробнича вартість, підходить для високоякісних застосувань | Вартість варіюється від низької до середньої, підходить для великомасштабного споживчого, промислового та військового застосування |
| Стійкість до перешкод | Нечутливий до електромагнітних перешкод, ідеально підходить для складних електромагнітних середовищ | Стійкість до перешкод покращилася завдяки вдосконаленню конструкції та корпусування; більшість MEMS IMU зараз пропонують хороший захист від електромагнітних перешкод |
| Температурна стабільність | Відмінна температурна стабільність, підходить для екстремальних умов | Завдяки методам температурної компенсації багато високоякісних MEMS IMU стабільно працюють у широкому діапазоні температур |
| Застосування | Високоточна навігація, аерокосмічна, морська, оборонна та інші високоякісні застосування | Широко використовується в побутовій електроніці, безпілотниках, військовій техніці, промисловій автоматизації, автомобільній електроніці тощо |
Ціна за одиницю інерційного вимірювання MEMS
Який ціновий діапазон MEMS IMU?
Ціна на інерціальні вимірювальні пристрої (IMU) на базі MEMS головним чином визначається точністю гіроскопа (вимірюється в градусах на годину, °/год), яка вказує на те, наскільки точно пристрій може вимірювати кутову швидкість. Чим вища точність, тим вища вартість. Ось огляд типових цін залежно від рівня точності.
Зверніть увагу, що ці цінові діапазони наведено лише для ознайомлення . Фактична вартість MEMS IMU може змінюватися залежно від таких факторів, як налаштування додаткових функцій.
| Діапазон точності (°/год) | Ціновий діапазон (за одиницю) | Типові застосування |
|---|---|---|
| Низька точність (1°/год - 10°/год) | $20 - $1,000 | Побутова електроніка, пристрої Інтернету речей, базові датчики руху |
| Середня точність (0,5°/год - 1°/год) | $1,000 - $5,000 | Дрони, робототехніка, промислова автоматизація, навігаційні системи |
| Висока точність (0,1°/год - 0,5°/год) | $5,000 - $15,000 | Аерокосмічна галузь, автомобільна навігація, оборонна галузь, високоякісна робототехніка |
Покроковий посібник, який допоможе вам знайти правильний ІМУ
Як вибрати/налаштувати правильний
інерційний вимірювальний блок (IMU) MEMS
КРОК 1
Визначення вимог до програми
Співпрацюйте з командою інженерів GuideNav, щоб визначити конкретні сценарії застосування та потреби в продуктивності, такі як точність, швидкість дрейфу, умови навколишнього середовища та обмеження розміру.
КРОК 2
Оцінка специфікацій продуктивності
Ключові показники, такі як нестабільність зміщення, кутове випадкове блукання (ARW) та динамічний діапазон, є вирішальними. Високоточні MEMS IMU можуть досягати нестабільності зміщення 0,1°/год , що підходить для вимогливих застосувань, таких як навігаційні та навідні системи.
КРОК 3
Оцінка екологічної стійкості
Враховуйте умови експлуатації. Для військових та промислових застосувань потрібні інерційні блоки живлення (ІМУ), здатні витримувати сильні удари, вібрацію та екстремальні температури, тоді як комерційні системи можуть мати менш суворі вимоги.
КРОК 4
Параметри налаштування
Запропонуйте варіанти налаштування для IMU, включаючи конкретні конфігурації датчиків, матеріали корпусу та типи інтерфейсів, щоб відповідати вашим унікальним вимогам.
КРОК 5
Прототип та валідація
Розробіть прототип на основі вибраних специфікацій та проведіть ретельні випробування, щоб перевірити, чи відповідає IMU всім критеріям продуктивності та вимогам застосування.
КРОК 6
Інтеграція та сумісність
Після успішної перевірки завершити конфігурацію IMU та допомогти вам з інтеграцією у вашу систему, надаючи підтримку для будь-яких необхідних налаштувань.
Наші переваги
Чому варто обрати Guidenav?
Довіряють ключові гравці
Нашим передовим інерціальним навігаційним продуктам довіряють провідні організації в аерокосмічному, оборонному, комерційному та промисловому секторах з понад 25 країн. Наша репутація надійності та точності вирізняє нас серед інших.
Найвища продуктивність
Наші продукти забезпечують найвищий рівень продуктивності з чудовою стабільністю зміщення. Розроблені для найвимогливіших застосувань, наші інерційні модулі на базі MEMS можуть досягати нестабільності зміщення з точністю до ≤0,1°/год.
Перевірено в суворих умовах
Наші рішення створені для роботи в екстремальних умовах, забезпечуючи стабільну продуктивність у складних умовах.
Відмінна продуктивність при вібраціях
Наша технологія MEMS та FOG IMU чудово працює в умовах високої вібрації, забезпечуючи точність та стабільність навіть у найскладніших експлуатаційних умовах.
Система PLUG & PLAY
Наші системи розроблені для легкої інтеграції, пропонуючи рішення типу «підключи та працюй», які спрощують встановлення та скорочують час налаштування, дозволяючи вам зосередитися на своїй місії.
БЕЗ ITAR
Наші продукти не підлягають обкладенню ITAR, що пропонує вам перевагу простіших міжнародних транзакцій та меншої кількості регуляторних перешкод. Оберіть GuideNav для безперебійної глобальної діяльності.
Наша фабрика - Дивись, щоб повірити








Чому варто обрати нас
Комплексні рішення для всіх ваших потреб у навігації
Покриття комерційного класу
Стабільність зміщення: >0,2°/год
Рішення: гіроскоп/IMU/INS на базі MEMS
Застосування: автомобільна навігація, безпілотні літальні апарати, транспорт, робототехніка тощо.
Тактичне покриття класу
Стабільність зміщення: 0,05°/год - 0,2°/год.
Рішення: гіроскоп/імунологічний пристрій/індуктивний пристрій на основі волоконної оптики та MEMS.
Застосування: операції з бронетехнікою, зенітна артилерія, точне наведення тощо.
Покриття рівня навігації
Стабільність зміщення: ≤0,05°/год
Рішення: волоконна оптика та кільцевий лазерний гіроскоп/IMU/INS
Застосування: наведення на середні та далекі відстані, військова авіація, супутники




Найчастіші запитання
Відповіді на ваші запитання
Інерційний вимірювальний блок (IMU) MEMS – це компактний пристрій, який вимірює параметри руху, включаючи прискорення та кутову швидкість, використовуючи технологію мікроелектромеханічних систем (MEMS). Усередині він поєднує акселерометри та гіроскопи для відстеження орієнтації та руху в тривимірному просторі. Зібрані дані є критично важливими для застосувань, що потребують точного відстеження руху.
ІМУ MEMS від GuideNav ідеально підходять для широкого спектру застосувань, що вимагають високої точності та надійності. До них належать аерокосмічна галузь, оборонна галузь, автономні транспортні засоби, робототехніка, промислові системи, глибоководні дослідження та позиціонування трубопроводів. Наші ІМУ чудово працюють у суворих умовах, де стабільність і точність є критично важливими. Крім того, ми пропонуємо індивідуальні рішення з різним рівнем точності, щоб задовольнити унікальні вимоги різних галузей промисловості. Зверніться до нас, щоб отримати індивідуальне рішення, яке відповідає вашим конкретним вимогам.
Важливі показники включають стабільність зміщення, кутове випадкове блукання, пропускну здатність та температурну компенсацію. Ми пропонуємо різні моделі з різними характеристиками продуктивності, гарантуючи задоволення унікальних потреб кожного застосування. Доступна індивідуальна налаштування для узгодження специфікацій з точними вимогами проекту — зв'яжіться з нами для отримання детальної інформації.
Інерційні модулі MEMS від GuideNav проходять комплексне калібрування, включаючи динамічну та температурну компенсацію, для забезпечення стабільності в будь-яких умовах. Наші моделі також включають вдосконалені алгоритми корекції помилок та забезпечення цілісності даних. Для застосувань, що вимагають різних рівнів точності, ми пропонуємо індивідуальні прецизійні рішення.
GuideNav пропонує широкий спектр можливостей налаштування, включаючи вибір певних інтерфейсів (наприклад, RS232, RS422), регульовану швидкість виведення даних, робочий діапазон і навіть варіанти матеріалів корпусу. Ми можемо змінювати характеристики продуктивності, щоб краще відповідати вимогам вашої програми. Зверніться до нас, щоб обговорити індивідуальне рішення для вашого проекту.
MEMS-імпульсні модулі (IMU) забезпечують надійне відстеження руху, стабільність та стійкість в екстремальних умовах, що є критично важливим для таких застосувань, як наведення ракет, навігація літаків та безпілотні системи. Рішення GuideNav охоплюють різні рівні точності, щоб задовольнити різноманітні профілі місій у цих секторах.
Наші MEMS-імпульсні блоки (IMU) створені для надійної роботи в екстремальних умовах, витримуючи температури від -40°C до +85°C та забезпечуючи високу стійкість до вібрації, ударів та вологості. Ми також пропонуємо індивідуальні специфікації навколишнього середовища для застосувань з унікальними експлуатаційними вимогами.
MEMS-імпульсні блоки (IMU) використовують мікророзмірні датчики, що робить їх меншими, легшими та часто енергоефективнішими, ніж традиційні IMU. Хоча традиційні IMU в деяких випадках можуть забезпечувати вищу точність, GuideNav пропонує різні моделі MEMS, які поєднують економічну ефективність з високою продуктивністю. Налаштування дозволяє нам досягти потрібної вам точності.
Звичайно! У нашому блозі є безліч інформативних статей, які заглиблюються в основи MEMS IMU. Ви можете ознайомитися з такими темами, як:
- Наскільки точним є інерціальний вимірювальний блок (IMU)?
- Що таке MEMS IMU?
- Найповніший посібник з інерціальних вимірювальних пристроїв (IMU).
Ці ресурси допоможуть вам краще зрозуміти технологію, точність та застосування MEMS IMU. Звертайтеся до нас, якщо у вас виникнуть додаткові запитання!