
Як гіроскопи MEMS живлять сучасну робототехніку: від складських AGV до гуманоїдних рук
MEMS-гіроскопи утворюють інерційне ядро передової робототехніки, забезпечуючи точне вимірювання кутової швидкості, відстеження орієнтації в режимі реального часу та надійний зворотний зв'язок щодо руху в компактних, енергоефективних корпусах. Вони незамінні для забезпечення стабільної навігації та спритного руху як для AGV, так і для гуманоїдних роботизованих рук.

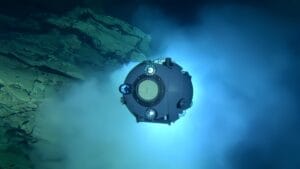
MEMS чи FOG для стабілізації LRF у броньованих платформах? Ось що вам потрібно знати
Виходячи з реального досвіду, гіроскопи типу FOG перевершують MEMS з точки зору довготривалої стабільності, вібростійкості та термостійкості в застосуваннях LRF, встановлених на транспортних засобах. MEMS все ще придатні для платформ з обмеженим простором або чутливими до бюджету, але вимагають ретельного проектування компенсації.

Життєвий цикл гіроскопа FOG: довговічність, калібрування та обслуговування
На практиці, підтримка точності та стабільності волоконно-оптичних гіроскопів (ВОГ) вимагає більше, ніж просто передового проектування датчиків — вона вимагає каліброваного системного каркасу, який включає теплову компенсацію, механічну ізоляцію та обслуговування з урахуванням життєвого циклу.
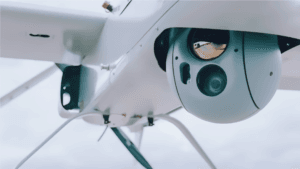
Чому волоконно-оптичні гіроскопічні (FOG) IMU є революційними для застосувань підвісів?
Ось чому я покладаюся на волоконно-оптичні гіроскопічні інерційні модулі (IMU) — вони забезпечують неперевершену точність і стійкість, перетворюючи хиткі, ненадійні кардани на стійкі платформи незалежно від умов.
Як рішення INS можуть подолати проблеми навігації в складних середовищах?
Інерціальні навігаційні системи (INS) працюють незалежно від зовнішніх сигналів, вимірюючи прискорення та кутову швидкість за допомогою внутрішніх датчиків, що робить їх незамінними в середовищах, де сигнали GNSS блокуються або ненадійні. Завдяки складному об'єднанню датчиків, компенсації помилок та корекціям на основі штучного інтелекту, INS забезпечує безперервне та точне позиціонування в найскладніших умовах.
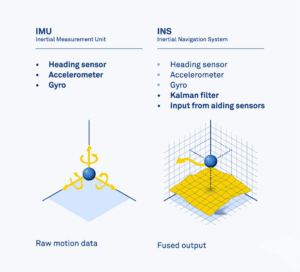
Яка різниця між IMU та INS?
IMU вимірює рух, тоді як INS використовує дані IMU для обчислення положення та орієнтації з плином часу — IMU — це датчик, INS — це система.