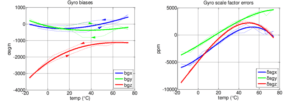
Термічна чутливість у волоконно-оптичних гіроскопах: стратегії проектування для екстремальних умов
Термічна чутливість у волоконно-оптичних гіроскопах виникає через розширення матеріалу, зміщення показника заломлення та поведінку оптичного джерела. Передові стратегії – теплова компенсація, оптимізація обмотки котушки та надійне калібрування – дозволяють волоконно-оптичним гіроскопам підтримувати точність в екстремальних умовах.
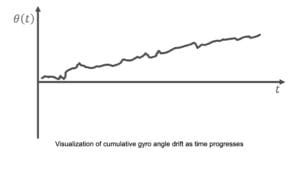
Проектування з урахуванням ARW: практична інженерія для вибору IMU (частина 2)
Кутове випадкове блукання (ARW) встановлює граничну межу точності IMU. Його неможливо усунути програмно, його можна лише зменшити за допомогою вибору датчиків з низьким рівнем шуму, стабільної теплової конструкції, віброізоляції та ефективних стратегій об'єднання кількох датчиків.
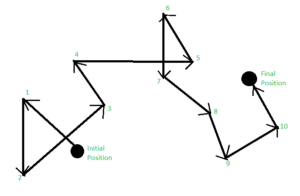
Розуміння ARW: Прихована межа точності IMU (Частина 1)
ARW — це не специфікація, це годинник. З моменту запуску вашого IMU він показує, як швидко знижується довіра до орієнтації. Чим нижчий він, тим довше ваша система залишається правильною.
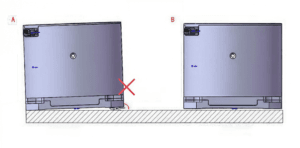
10 помилок проектування, які допускають інженери під час інтеграції інерційних модулів (IMU)
Помилки інтеграції IMU можуть зруйнувати надійність навігації. Від неправильного вирівнювання та вібрації до поганого калібрування та надмірної залежності від об'єднання датчиків, інженери часто повторюють ті самі помилки. У цьому посібнику ми розглянемо 10 найпоширеніших помилок інтеграції IMU, пояснимо їхні наслідки та надамо експертні рішення, які ви можете застосувати у власних проектах.
Технологія FOG в управлінні орієнтацією космічних апаратів: за межами MEMS
Волоконно-оптичні гіроскопи перевершують MEMS, забезпечуючи довготривалу стабільність, стійкість до радіації та точність, яка залишається надійною протягом багатьох років. Вони незамінні для супутників, сузір'їв та зондів глибокого космосу, де точність не може бути поставлена під загрозу.
Як мультисенсорне злиття даних переосмислює інерціальні навігаційні системи
Точність інерціальної навігації зрештою обмежується тим, наскільки добре змодельовані та компенсовані помилки датчиків. Від дрейфу зміщення до випадкового блукання, ефективне зменшення помилок вимагає поєднання розробки апаратного забезпечення, процедур калібрування та алгоритмічної корекції в режимі реального часу.