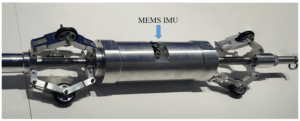
Застосування MEMS IMU в роботах для інспекції трубопроводів
MEMS-імунологічні модулі (IMU) забезпечують точну інерційну навігацію для роботів для інспекції трубопроводів, що працюють в середовищах, де немає GNSS. Забезпечуючи стабільні дані про положення, швидкість та місцезнаходження, вони забезпечують надійне картування дефектів, плавне керування траєкторією та безперервну роботу в обмежених підземних або підводних трубопроводах.

Приховані пастки використання високоточних MEMS IMU: що повинен знати кожен інтегратор
Високоточні MEMS-імпульсні модулі (IMU) забезпечують неперевершену продуктивність датчиків руху, але лише за умови правильного використання. Це розкриває чотири критичні помилки використання, які часто призводять до втрати точності, та способи їх запобігання в реальній інтеграції.
Переваги та недоліки Honeywell MEMS IMU HG1930
Honeywell HG1930 — це компактний MEMS IMU тактичного класу, що пропонує надійну роботу та міцну конструкцію для безпілотних літальних апаратів, робототехніки та оборонних систем. Він забезпечує стабільну точність у складних умовах, але має вищу вартість та експортні обмеження.

Технологія локалізації на основі INS, що лежить в основі автономного водіння
Автономні транспортні засоби досягають точності на сантиметровому рівні завдяки інтеграції GNSS/INS, картографуванню LiDAR та візуальному сприйняттю, а високоточні IMU формують основу локалізації у разі зникнення сигналів GPS.

Чи може IMU самостійно виконувати одометрію?
Теоретично, IMU може обчислювати одометрію за допомогою подвійного інтегрування, але зміщення та шум призводять до її експоненціального зсуву з часом. Тому реальні навігаційні системи покладаються на об'єднання IMU з GNSS, LiDAR або камерами для підтримки точності та стабільності.
Коли слід перекалібрувати або замінити FOG IMU?
Перекалібруйте свій FOG IMU кожні 12–24 місяці, щоб підтримувати стабільність зміщення. Замінюйте його через 5–8 років або коли дрейф перевищує технічні характеристики, щоб забезпечити довгострокову надійність навігації.