«Чи варто нам обрати MEMS чи FOG?» — це питання, яке я чую найчастіше, і не тому, що люди не знають характеристик. Незрозуміло, що насправді важливо на практиці: дрейф, ударостійкість чи просто бюджет? І надто часто неправильне рішення не призводить до повної невдачі — воно виходить з ладу непомітно, доки не стає надто пізно відновлюватися.
MEMS-імпульсні модулі (IMU) менші, легші та економічніші, що робить їх ідеальними для систем з обмеженим простором та потужністю. IMU типу FOG, навпаки, забезпечують значно кращу стабільність зміщення, менший дрейф та чудову продуктивність у складних умовах або умовах відсутності GNSS.
Компроміси не очевидні — давайте розглянемо, що дійсно важливо.
Зміст
Як працюють гіроскопи MEMS та FOG?
MEMS-гіроскопи вимірюють рух, виявляючи крихітні зрушення у вібруючій кремнієвій структурі, подібно до того, як камертон коливається під час обертання. Вони побудовані на мікрочипах, що робить їх компактними, енергоефективними та доступними.
З іншого боку, гіроскопи FOG Вони посилають лазерні промені через довгу котушку оптичного волокна; коли пристрій обертається, промені трохи зміщуються несинхронізовано — це явище називається ефектом Саньяка. Це дозволяє FOG виявляти обертання з винятковою точністю, без рухомих частин та з надзвичайною стабільністю з часом.
MEMS проти FOG: як вибрати правильний?
Вибір між MEMS та FOG не обов'язково має бути складним — зосередившись на кількох ключових факторах продуктивності, ви можете швидко звузити коло вибору, що підходить саме вам.
1. Точність
Під час оцінки точності найважливішими параметрами є стабільність зміщення та кутове випадкове блукання (ARW) . Нижче наведено порівняння продуктів GuideNav на основі цих ключових показників.
| Параметр | МЕМС | ТУМАН |
|---|---|---|
| Стабільність зміщення (°/год) | 0.05 ~ 3 | 0.003 ~ 0.5 |
| Випадкове блукання кута (°/√h) | 0.05 ~ 0.45 | 0.0002 ~ 0.02 |
2. Розмір і вага
MEMS компактні та легкі для систем з обмеженим простором, тоді як FOG більші та важчі, підходять для високоякісних або стаціонарних платформ.
3. Споживання енергії
MEMS зазвичай споживають менше 1 Вт, що робить їх ідеальними для платформ з живленням від батарей та мобільних платформ. Натомість, FOG можуть вимагати понад 10 Вт через свої лазерні оптичні системи та часто вимагають додаткового терморегулювання, згідно з порівняльними даними з портфоліо продуктів GuideNav.
4. Довгострокова стабільність
Замкнуті FOG забезпечують чудову довгострокову точність та стійкість до впливу навколишнього середовища, тоді як MEMS, хоча й удосконалюються в методах компенсації, все ще відстають у стійкій стабільності.
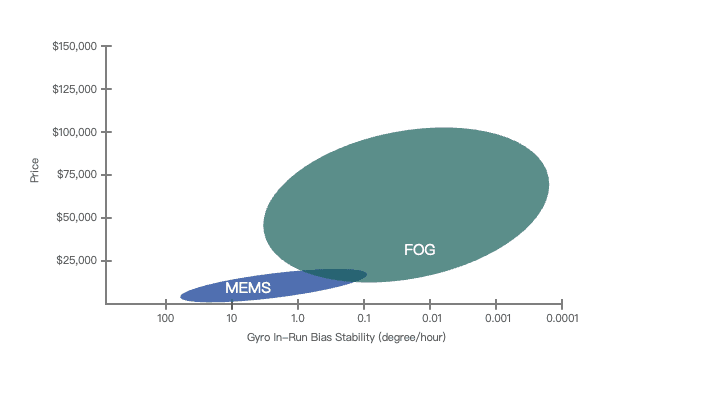
5. Вартість
MEMS є економічно ефективними та підходять для великосерійного використання, тоді як FOG є значно дорожчими та орієнтованими на високоякісні ринки, де критично важлива точність.
Після окреслення основних відмінностей у точності, форм-факторі, енергоефективності, довгостроковій стабільності та вартості, у таблиці нижче представлено комплексне порівняння для підтримки більш обґрунтованої оцінки.
| Функція | ІМУ МЕМС | ІМУ ВОГ |
|---|---|---|
| Технології | Мікромеханічні датчики на основі кремнію | Оптичні гіроскопи з використанням волоконних котушок та світлової інтерференції |
| Розмір і форм-фактор | Дуже компактний, підходить для конструкцій з обмеженим простором | Більш громіздка форма завдяки прокладанню волокон та оптиці |
| Точність | Помірна точність для загального використання | Висока точність, що підходить для критично важливих систем |
| Вартість | Низька вартість, ідеально підходить для масового виробництва | Значно вища вартість через складність |
| Споживання енергії | Висока ефективність з мінімальним енергоспоживанням | Споживає більше енергії, зазвичай для високопродуктивного використання |
| Типові застосування | Дрони, носима електроніка, автомобільна техніка, споживчі пристрої | Оборона, аерокосмічна, морська, високоякісна промисловість |
| Принцип дії | Виявляє рух за допомогою вібруючих масових структур | Використовує ефект Саньяка для визначення кутової швидкості |
| Екологічна стабільність | Чутливість до тепла та вібрації з часом | Висока стійкість до термічного дрейфу та механічних навантажень |
| Рівень точності | Достатньо для короткочасної або допоміжної навігації | Зберігає підступеневий курс протягом тривалого часу |
| Швидкість реагування | Швидкий та чуйний у динамічних системах | Стабільна реакція; трохи повільніше, ніж MEMS |
| Довговічність | Стійкий, але менш стабільний в екстремальних умовах | Розроблено для екстремальних, критично важливих умов |
| Інтеграційні зусилля | Проста інтеграція з більшістю платформ | Потрібне ретельне налаштування та вирівнювання на рівні системи |
Чи може точність MEMS перевершити FOG?
З точки зору експерта, FOG все ще лідирує за точністю , особливо з точки зору стабільності зміщення та низького рівня шуму . Саме тому він залишається найкращим вибором для високоточної навігації .
Але технологія MEMS швидко наздоганяє . Сучасні гіроскопи MEMS тактичного класу можуть досягати:
- Нестабільність зміщення до 05°/год
- Випадкове блукання кута приблизно 01°/√год
Це ставить їх близькими до FOG початкового рівня , але в меншому, легшому та набагато дешевшому форм-факторі.
Хоча високоякісні FOG все ще перевершують MEMS у надточних та тривалих випадках використання, сучасні MEMS зараз достатньо точні для багатьох вимогливих застосувань, особливо коли розмір, вага, потужність та вартість .

Які реальні варіанти використання MEMS та FOG IMU?
Вибір між MEMS та FOG зрештою залежить від того, що система повинна витримувати, і скільки помилок вона може переносити з часом. Нижче наведено детальний опис того, де кожна технологія вписується в реальне розгортання:
Варіанти використання MEMS IMU
MEMS-імпульсні модулі (IMU) оптимізовані для застосувань, де розмір, вага, енергоспоживання та економічна ефективність мають перевагу над надвисокою точністю.
- Безпілотні літальні апарати (БПЛА)
ідеально підходять для малих та середніх дронів, що використовують ГНСС для корекції - Споживча та промислова робототехніка.
Використовується для відстеження руху, контролю балансу та зворотного зв'язку щодо орієнтації. - Автомобільні системи (ADAS, зчислення місця, стабілізація)
при поєднанні з GNSS або колісними енкодерами - Носимі та кишенькові пристрої.
Датчики руху в компактних пристроях з живленням від батарейок.
МЕМС добре працює в системах, де доступна зовнішня корекція та прийнятна толерантність до дрейфу.
Варіанти використання FOG IMU
Інерційні модулі FOG вибираються там, де точність інерційних вимірювань має залишатися бездоганною під впливом навантажень, ізоляції або тривалих періодів роботи .
- Оборонні та військові платформи
Тактична навігація, стабілізація транспортних засобів, наведення ракет та башт - Морські та підводні системи.
Судна тривалого перебування, підводні апарати (ROV) та інерціальна навігація в умовах відключення ГНСС. - Космічні та аерокосмічні застосування:
стартові платформи, супутники та керування орієнтацією космічних апаратів - Геодезія та точне буріння.
Застосування, що вимагають зміни курсу на менші за градус з часом без скидання.
FOG забезпечує безперервність місії там, де MEMS може виходити за допустимі пороги.
У GuideNav ми пропонуємо повний портфель інерційних синхронізаторів (IMU) як MEMS, так і FOG, розроблених для задоволення різноманітних потреб комерційного, промислового та оборонного застосування. Незалежно від того, чи пріоритетом є розмір та ефективність, чи довгострокова інерційна точність, ми пропонуємо варіанти, адаптовані до кожного діапазону продуктивності.

Наскільки дорожчі FOG порівняно з MEMS?
Інерційні модулі на основі волонтера (ВОГ) зазвичай у 8-10 разів дорожчі, ніж модулі на основі MEMS. Ця різниця в ціні зумовлена:
- Дорожчі компоненти, такі як волоконні котушки та інтерферометрична оптика
- Точне складання, що вимагає жорстких допусків та калібрування
- Малосерійне виробництво, на відміну від MEMS, які виграють від масового виробництва
На відміну від них, MEMS IMU використовують економічно ефективні кремнієві процеси та легше масштабуються, що призводить до цін часто нижчих за одну десяту від цін на системи FOG.
Як мені вирішити, що мені потрібно для мого проєкту: меми чи туман?
Це залежить від вашого застосування, необхідної точності та середовища. У GuideNav ми пропонуємо як MEMS, так і FOG-базовані IMU та INS системи, починаючи від компактних, економічно ефективних пристроїв і закінчуючи високоточними рішеннями тактичного класу.
Щоб визначити, яка сенсорна технологія найкраще підходить для вашого проєкту, ми рекомендуємо оцінити такі фактори:
- Деталі заявки.
- Ключові вимоги до продуктивності: (наприклад, стабільність зміщення цілі, динамічний діапазон, умови навколишнього середовища тощо)
Все ще не впевнені? Поділіться своїми характеристиками — ми порекомендуємо найкращий варіант для вашої системи.
