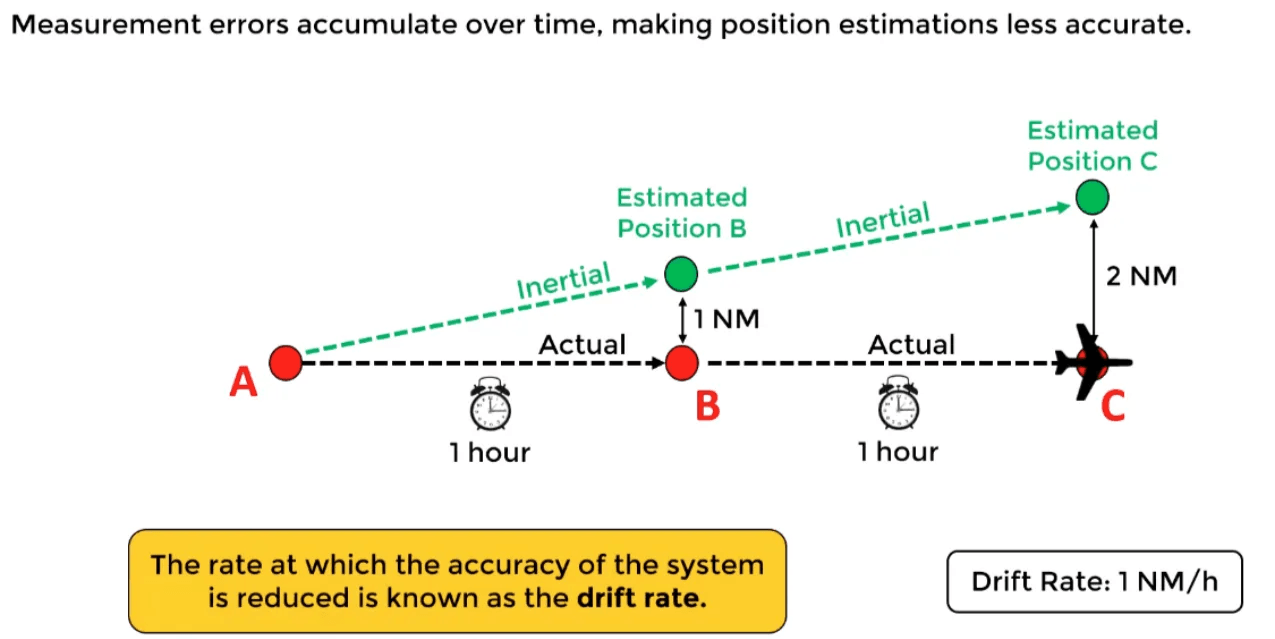
У контексті інерціальних навігаційних систем (ІНС) дрейф означає поступове накопичення похибки з часом, що призводить до поступового зниження точності вимірювань системи (таких як положення, швидкість або напрямок).
Ось як це працює:
- Відсутність зовнішньої корекції : в INS для обчислення таких речей, як положення та напрямок, використовуються такі датчики, як акселерометри та гіроскопи. Однак ці датчики не ідеальні, і їхні невеликі похибки можуть накопичуватися з часом.
- Невеликі похибки накопичуються : навіть крихітна похибка у вимірюванні (наприклад, крихітне зміщення положення або незначна похибка обертання) може збільшуватися з часом, що призводить до «відхилення» системи від істинного значення.
Чому це важливо:
Дрейф є поширеною проблемою в INS, оскільки він призводить до збільшення помилок у міру того, як система продовжує працювати. Без коригувань із зовнішніх джерел (таких як GPS) дрейф може призвести до того, що система через деякий час почне надавати неточні результати, що впливатиме на загальну точність навігаційної системи.