Jiroskoplar ve İvmeölçerler IMU Performansını Nasıl Şekillendirir?

Kararlı bir IMU, jiroskop ve ivmeölçer verilerinin birleştirilmesine dayanır. Jiroskoplar kayar, ivmeölçerler gürültülüdür ve tamamlayıcı bir filtre, her ikisini de birleştirerek güvenilir, hafif ve gerçek zamanlı bir konum tahmini sunar.
Kuvars İvmeölçer ve MEMS İvmeölçer

Kuvars İvmeölçerler üstün uzun vadeli hassasiyet ve kararlılık sağlarken, MEMS İvmeölçerler kompakt, dayanıklı ve uygun maliyetli performans sunar. Doğru seçim, projenizin doğruluk gereksinimlerine, bütçenize ve çevre koşullarına bağlıdır.
Test Koşulları Neden IMU Spesifikasyonlarının Gerçek Anlamını Tanımlar?
IMU test koşulları, IMU spesifikasyonlarının ne kadar gerçekçi ve güvenilir olduğunu belirler. Sıcaklık, titreşim, süre ve filtreleme, veri sayfasında iddia edilenleri ve sensörün gerçekte sunduğu şeyleri şekillendirir.
MEMS IMU'nun Boru Hattı Muayene Robotlarında Uygulanması
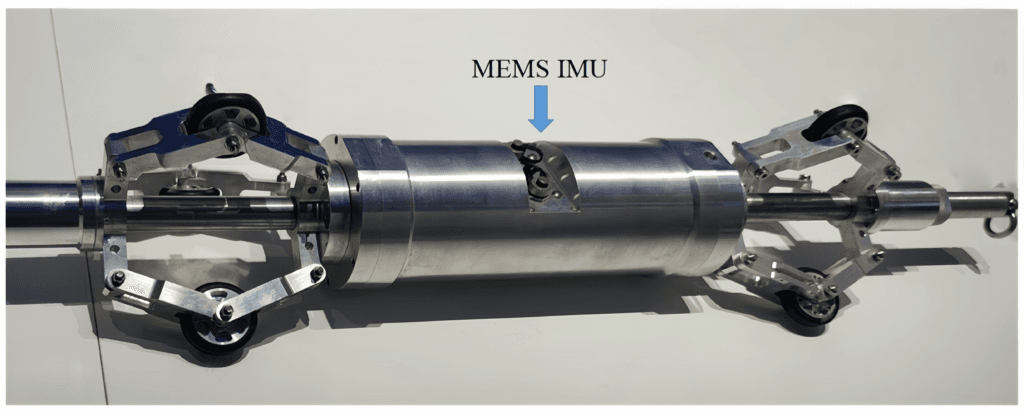
MEMS IMU'lar, GNSS'in yasak olduğu ortamlarda çalışan boru hattı denetim robotları için hassas ataletsel navigasyon sağlar. Kararlı tutum, hız ve konum verileri sağlayarak, sınırlı yeraltı veya deniz altı boru hatlarında güvenilir hata haritalaması, sorunsuz yörünge kontrolü ve sürekli çalışma sağlarlar.
Yüksek Hassasiyetli MEMS IMU'ları Kullanmanın Gizli Tuzakları: Her Entegratörün Bilmesi Gerekenler

Yüksek hassasiyetli MEMS IMU'lar, yalnızca doğru kullanıldığında eşsiz hareket algılama performansı sunar. Bu, genellikle doğruluk kaybına neden olan dört kritik kullanım hatasını ve bunların gerçek dünya entegrasyonunda nasıl önlenebileceğini ortaya koyuyor.
Honeywell MEMS IMU HG1930'un Avantajları ve Dezavantajları
Honeywell HG1930, İHA'lar, robotik ve savunma sistemleri için güvenilir performans ve sağlam tasarım sunan kompakt, taktik sınıf bir MEMS IMU'dur. Zorlu ortamlarda istikrarlı bir hassasiyet sunar, ancak daha yüksek maliyet ve ihracat kısıtlamalarıyla birlikte gelir.
Otonom Sürüşün Arkasındaki INS Tabanlı Yerelleştirme Teknolojisinin İç Yüzü
Otonom araçlar, GNSS/INS entegrasyonu, LiDAR haritalama ve görsel algılama yoluyla santimetre düzeyinde doğruluk elde ederken, GPS sinyallerinin başarısız olduğu durumlarda yerelleştirmenin temelini yüksek hassasiyetli IMU'lar oluşturuyor.
Bir IMU Tek Başına Odometri Yapabilir mi?

Bir IMU, teorik olarak çift entegrasyon yoluyla kilometre sayacını hesaplayabilir, ancak sapma ve gürültü, zaman içinde katlanarak sapmaya neden olur. Bu nedenle, gerçek dünya navigasyon sistemleri, hassasiyet ve kararlılığı korumak için IMU'nun GNSS, LiDAR veya kameralarla füzyonuna güvenir.
FOG IMU'yu Ne Zaman Yeniden Kalibre Etmeli veya Değiştirmelisiniz?
Eğim kararlılığını korumak için FOG IMU'nuzu her 12-24 ayda bir yeniden kalibre edin. Uzun vadeli navigasyon güvenilirliğini sağlamak için 5-8 yıl sonra veya sapma teknik özellikleri aştığında değiştirin.
GuideNav Tasarımının İç Yüzü: Sağlam Optik Fiber IMU'lar Darbe ve Titreşime Nasıl Dayanır?

Sağlam fiber optik IMU'lar, titanyum gövdeler, yüzer bobin süspansiyonları, elastomerik ve tel halat izolatörleri ve yapay zeka tabanlı sinyal dengelemeyi bir araya getirerek olağanüstü güvenilirlik sağlar. Bu teknolojiler, geleneksel jiroskopların başarısız olduğu yoğun titreşim ve şok koşullarında kusursuz bir şekilde çalışmalarını sağlar.