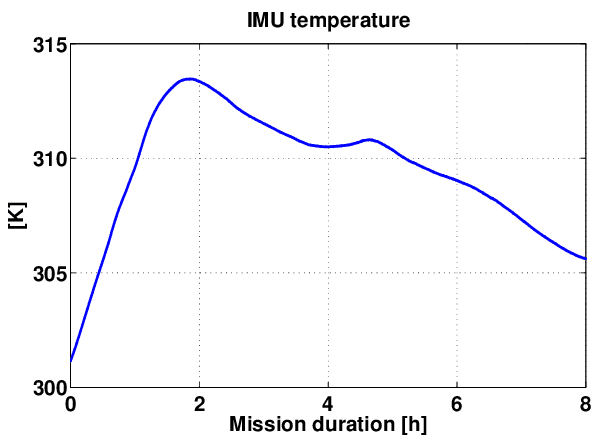
IMU sıcaklık kayması, jiroskop hatasının inatçı bir kaynağıdır: Sıcaklık değiştikçe, jiroskop sapması kayar ve statik ünite dönüyormuş gibi görünür. Bu sapma zamanla birleştiğinden, küçük bir sapma bile İHA'larda, AGV'lerde, robotlarda ve stabilize platformlarda önemli bir tutum veya yön hatasına dönüşebilir. Etkili çözüm sistematiktir: Donanım tasarımıyla IMU sıcaklık kaymasını azaltın, kalibrasyon sırasında sıcaklık boyunca karakterize edin ve gerçek zamanlı olarak çevrimiçi olarak telafi edin.
IMU sıcaklık kayması, atalet sistemlerinde doğruluk bozulmasının önemli bir nedenidir. Donanım optimizasyonu, tam aralıklı termal kalibrasyon ve çevrimiçi telafi sayesinde mühendisler, kaymayı önemli ölçüde azaltabilir ve kararlı bir tutum performansı sağlayabilir.
IMU sıcaklık kayması, hem MEMS hem de FOG cihazlarının fiziksel davranışından kaynaklanır. Sıcaklık değiştikçe sensörün sapması değişir ve düzeltilmezse bu kayma uzun vadeli konum hatalarına dönüşür. IMU sıcaklık kaymasını yönetmek, sıcaklığın sensörü nasıl etkilediğini anlamayı, kalibrasyon yoluyla kaymasını karakterize etmeyi ve gerçek zamanlı telafi uygulamayı gerektirir. Uygun donanım tasarımı, filtreleme ve sensör füzyonu ile desteklendiğinde, bu kayma öngörülebilir ve tamamen yönetilebilir hale gelir.
İçindekiler
Jiroskop Sıcaklık Kaymasını Anlama
IMU sıcaklık kaymasının nasıl azaltılacağını incelemeden önce, bu olgunun neyi temsil ettiğini anlamak önemlidir. Sıcaklık kayması rastgele bir gürültü değildir; sensörün iç sıcaklığı değiştikçe sapmada sistematik bir değişikliktir. Bu sapma, konum tahminine entegre edildiğinden, IMU sıcaklık kayması uzun süreli çalışma sırasında büyük yön veya yönelim hatalarına yol açabilir.
Bir jiroskopun çıktısı:
Ölçülen açısal hız = gerçek hız + önyargı + gürültü
, sıcaklık değiştikçe değişen önyargı terimini ifade eder ve bu mekanizma MEMS ve FOG jiroskopları için farklılık gösterir.
MEMS Gyroscopes
MEMS tabanlı IMU sıcaklık kayması, elastik modül değişimlerinden, rezonans frekansı kaymalarından, sönümleme değişimlerinden, ASIC kazanç kaymasından ve paketleme stresinden kaynaklanır. Bu etkiler genellikle hızlı sıcaklık geçişleri sırasında önemli ısınma kaymalarına veya önyargı kaymalarına neden olur.
FOG Jiroskopları
FOG cihazları daha düşük IMU sıcaklık kayması gösterir, ancak yine de optik faz değişimlerinden, ışık kaynağındaki dalga boyu kaymalarından, fiber bobin genleşmesinden ve termal stresten etkilenirler. Kaymaları daha pürüzsüzdür, ancak yine de modellenmeli ve telafi edilmelidir.
Sürüklenme Neden Ciddi Bir Tutum Hatası Haline Gelir?
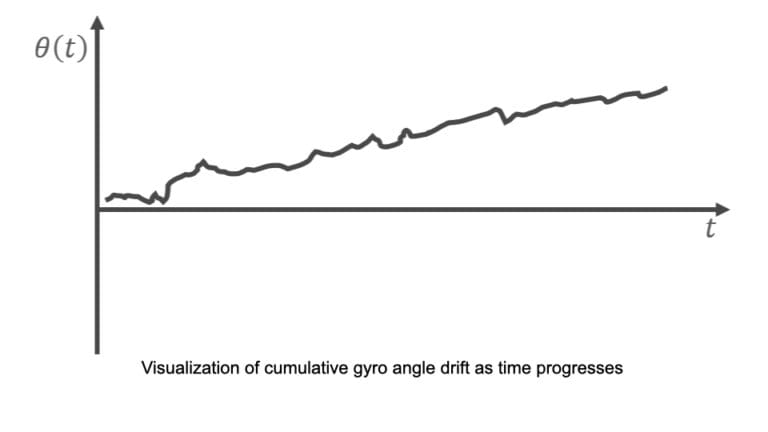
Sıcaklık kayması, oluştuğu anda küçük görünse de, konum tahmin sürecine girdiğinde etkisi ciddileşir. Jiroskoplar açısal hızı ölçer ve konum, bu hızın zaman içinde entegre edilmesiyle elde edilir. Ne kadar küçük olursa olsun, düzeltilmemiş herhangi bir sapma birikmeye devam eder ve uzun süreli çalışma sırasında yuvarlanma, eğim ve özellikle de yön açısından giderek artan hatalara neden olur.
Gyro bias zaman içinde entegre edilmiştir:
Tutum hatası ≈ ∫ önyargı × zaman
0,01°/s gibi görünüşte önemsiz bir sapma, dakikalar içinde birkaç derecelik yönelim hatasına yol açabilir. Görev ne kadar uzun ve harici referanslar ne kadar azsa, sıcaklık kayması genel navigasyon doğruluğuna o kadar fazla hakim olur.
Sıcaklık Kaymasını Azaltmak İçin Üç Temel Mühendislik Yöntemi
Jiroskop sıcaklık kaymasını azaltmak, sorunu kaynağında ele alan, kontrollü koşullar altında modelleyen ve çalışma sırasında sürekli olarak düzelten katmanlı bir mühendislik yaklaşımı gerektirir. Mühendisler genellikle üç tamamlayıcı yöntem : donanım optimizasyonu, çevrimdışı termal kalibrasyon ve çevrimiçi gerçek zamanlı telafi.
(1) Donanım Optimizasyonu: Kaynakta Kaymanın Azaltılması
Donanım düzeyindeki iyileştirmeler, doğal jiroskop kararlılığını büyük ölçüde etkiler. Etkili stratejiler arasında düşük sıcaklık katsayılı sensörler seçmek, termal olarak kararlı yapı malzemeleri kullanmak, simetrik düzenleri korumak ve dahili ısı akışını yönetmek yer alır. Yüksek kaliteli IMU'lar ayrıca, sensörü sabit bir çalışma sıcaklığında tutarak içsel kaymayı en aza indirmek için bir ısıtıcı veya termal kontrol modülü entegre edebilir.
(2) Çevrimdışı Sıcaklık Kalibrasyonu: Bir Önyargı-Sıcaklık Modeli Oluşturma
Üretim sırasında, IMU bir sıcaklık odasına yerleştirilir ve tüm çalışma aralığı boyunca (örneğin, -40°C ila +85°C) taranır. Her sıcaklık noktasında sapma değerleri kaydedilir ve ardından doğrusal, polinomsal veya parçalı bir telafi modeline yerleştirilir. Model katsayıları aygıt yazılımında saklanır ve doğru gerçek zamanlı düzeltmenin temelini oluşturur.
(3) Çevrimiçi Tazminat: Gerçek Zamanlı Olarak Kaymayı Düzeltme
Bir önyargı-sıcaklık modeli oluşturulduktan sonra, IMU çalışma sırasındaki sapmayı telafi eder. Jiroskop çekirdeğinin yakınındaki bir sıcaklık sensörü gerçek zamanlı sıcaklık ölçümleri sağlar, aygıt yazılımı modeli kullanarak beklenen sapmayı hesaplar ve bu sapma ham ölçümlerden çıkarılır. Bu, ısınma davranışı, iç ısınma ve ortam sıcaklığı değişimlerinden kaynaklanan sapmayı dengeler.

Telafinin Ötesinde: Uzun Vadeli Kararlılık için Filtreler ve Sensör Füzyonu
Güçlü donanım tasarımı, hassas kalibrasyon ve gerçek zamanlı telafi ile bile, küçük kalıntı sapmaları her zaman kalacaktır. Uzun çalışma süreleri boyunca bu kalıntı hatalar birikebileceğinden, yüksek performanslı sistemler kararlılık için filtreleme ve sensör füzyonu ekler.
Filtreleme Teknikleri
Alçak geçiren veya adaptif filtreler, önyargı tahminini dengeler ve gürültülü sıcaklık geçişlerini azaltır. Statik algılama yöntemleri, sistemin IMU sabitken önyargı tahminlerini güncellemesine olanak tanıyarak uzun vadeli kararlılığı daha da artırır.
Sensör füzyonu
Füzyon algoritmaları, biriken kaymayı bastırmak için harici referanslar kullanır. Tipik yardımcı kaynaklar arasında yer çekimine dayalı eğim/yuvarlanma düzeltmesi için ivmeölçerler, yön sabitleme için manyetometreler veya GNSS ve uzun süreli navigasyon için odometri, görüş veya LiDAR bulunur. EKF/UKF tabanlı füzyon, sistemi mutlak referanslara sabitleyerek, sıcaklığa bağlı kaymanın performansa hakim olmasını önler.

Doğru IMU'yu Seçmek: MEMS ve FOG
Doğru IMU'yu erken seçmek, daha sonra sıcaklık kayması sınırlamalarından kaçınmanın en etkili yollarından biridir. MEMS IMU'lar, küçük boyut, düşük güç ve maliyet verimliliği öncelik olduğunda ve harici destek mevcut olduğunda idealdir. Kısa ve orta vadeli görev süreleri ve orta düzey çevre koşulları için idealdirler.
Uzun vadeli stabilite, yüksek rota doğruluğu veya geniş sıcaklık değişimleri beklenen durumlarda FOG IMU'lar daha iyi bir seçimdir. GNSS veya diğer harici düzeltmelere güvenilemeyen görevler için tercih edilirler.
Basit kılavuz:
- Eğer sisteminiz füzyona dayanabiliyorsa ve düşük SWaP'a ihtiyaç duyuyorsa → MEMS'i seçin.
- Eğer sisteminiz biriken kaymayı tolere edemiyorsa → FOG'u seçin.

Doğru GuideNav IMU ile Kararlı Bir Sistem Oluşturma
IMU sıcaklık kayması, uygun mühendislik yöntemleriyle (donanım optimizasyonu, sıcaklık kalibrasyonu, gerçek zamanlı telafi, filtreleme ve sensör birleştirme) ele alındığında yönetilebilir hale gelir. Bu önlemler alındığında, İHA'lar, AGV'ler, robotlar ve savunma sistemleri zorlu termal koşullarda bile istikrarlı performansını koruyabilir.
GuideNav, güçlü termal stabilite, özenle tasarlanmış kalibrasyon iş akışları ve güvenilir kompanzasyon algoritmalarıyla üretilmiş IMU'lar sunar. Operasyonel ortamınıza ve doğruluk ihtiyaçlarınıza uygun bir GuideNav IMU seçmek, sisteminizin sağlam bir termal temelle başlamasını sağlar; IMU sıcaklık kaymasını en aza indirir ve uzun vadeli güvenilirliği artırır.
