Saha operasyonları için atalet sistemleri tasarlama deneyimimde, mühendisler genellikle aldatıcı derecede basit bir sayıyı gözden kaçırırlar: Açı Rastgele Yürüyüşü. Bu, önyargı kararlılığı veya bant genişliği kadar gösterişli olmasa da, sisteminizin gerçek dünyadaki güvenilirliğinin tavan sınırını belirler; özellikle de GNSS devre dışı kaldığında. ARW, kalibre ettiğiniz bir hata değildir. Saniye saniye artan gürültüdür. Nasıl çalıştığını anladığınızda, tezgahınızdaki her IMU'yu değerlendirme şeklinizi değiştirir.
ARW bir özellik değil, bir saattir. IMU'nuz çalışmaya başladığı andan itibaren, yön güveninin ne kadar hızlı azaldığını gösterir. Ne kadar düşükse, sisteminiz o kadar uzun süre doğru kalır.
Yıllar boyunca, ekiplerin önyargı özelliklerine ve bant genişliği çizelgelerine dayanarak IMU'ları seçtiklerini ve simülasyonu altüst eden bir sapmayla karşılaştıklarını gördüm. Bu sapma genellikle gözden kaçırdıkları şeyden değil, yeterince önemsemedikleri şeyden, yani ARW'den kaynaklanır. ARW'nin gürültü ufkunuzu tanımladığını fark ettiğinizde, veri sayfalarını farklı okumaya başlarsınız. "Hassasiyet nedir?" diye sormayı bırakıp, "Belirsizlik hakim olmadan önce bu şeye ne kadar güvenebilirim?" diye sormaya başlarsınız.
İçindekiler
Açı Rastgele Yürüyüş (ARW) Tam Olarak Nedir?
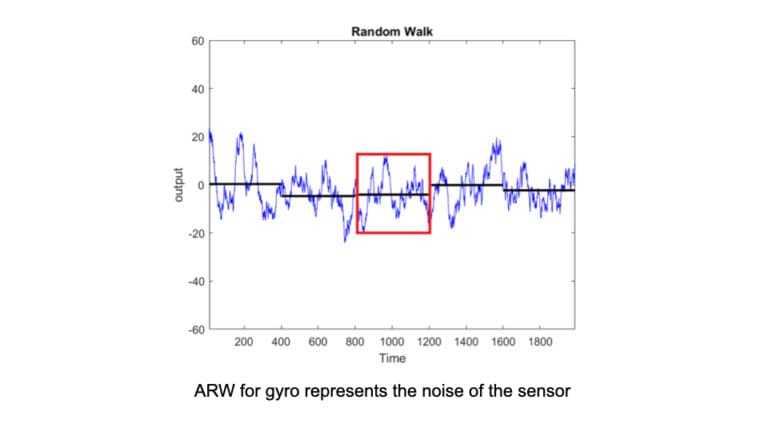
Basitçe ifade etmek gerekirse, Açısal Rastgele Yürüyüş (ARW), açısal hızı entegre etmeye başladığınız anda jiroskopunuzun biriktirdiği gürültüdür. Ancak açık olalım: Bu bir ölçüm hatası veya sapma kayması değildir. jiroskopun sinyal yolundaki beyaz gürültüden kaynaklanan belirsizliğin zaman içindeki karekök artışıdır Kalibre edemezsiniz ve sabitlenmesini bekleyemezsiniz ; her zaman oradadır, arka planda tıkır tıkır işler.
yönelim tahmininizin "temel bulanıklığı" olarak tanımlarım . Platformunuzun hareket halinde mi yoksa hareketsiz mi olduğu umurunda değildir. Bir laboratuvarda , masaya kaya gibi sabit bir sensör takılmış olsa bile, ARW birikir. Onu bu kadar temel yapan da budur. Bir performans kusuru değil, fiziktir.
ARW Pratikte Nasıl Ölçülür?
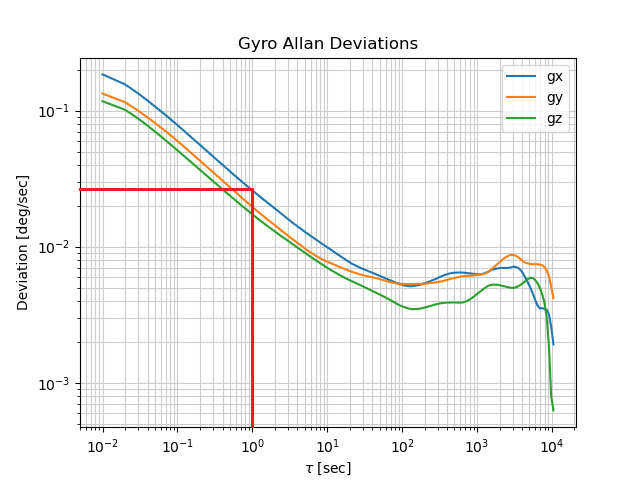
ARW'yi ölçmenin altın standardı Allan varyans analizidir.
Bu teknik, farklı gürültü türlerini farklı zaman aralıklarında ayrıştırır. Kısa ortalama sürelerinde ARW, log-log Allan sapma grafiğinde karakteristik bir -½ eğim olarak kendini gösterir. Bu, jiroskopunuzun çıkışındaki beyaz gürültünün işaretidir ve konum doğruluğunuz için temel oluşturur.
Ama sadece veri sayfasına güvenmemelisiniz.
İş akışımda, her zaman mekanik olarak izole edilmiş bir platformda kontrollü statik testler çalıştırır, ham jiroskop verilerini kaydeder ve kendi Allan çizimlerimi oluştururum. Temiz bir kısa süreli eğim, jiroskopun kararlı olduğunu gösterir. Eğim gürültülü veya düzensizse, "0,05°/√h" olarak ilan edilen değerin devreye alındığında geçerli olmayabileceğini biliyorum.
ARW sadece bir sayı değil, gerçek verilerde görmeniz gereken bir modeldir.
İşte bu yüzden ARW'yi sadece alıntı yapılacak bir şey olarak değil, doğrulanması gereken bir şey olarak görüyorum. Allan varyansınız spesifikasyonla uyuşmuyorsa, tüm füzyon yığınınız daha sonra bunun sonuçlarına katlanabilir.
IMU Doğruluğu İçin ARW Neden Kritiktir?
Asla Uyumayan Gürültü
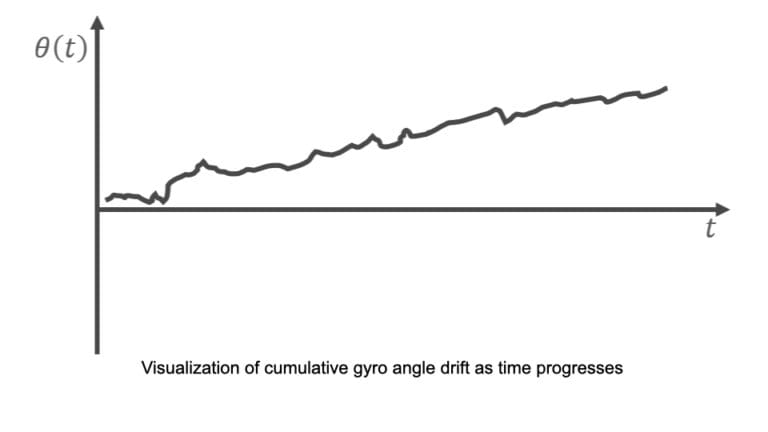
Önyargı veya ölçek faktörü gibi deterministik hataların aksine, ARW yön tahmininize sürekli olarak belirsizlik katar. Jiroskoplar açısal hızı ölçtüğü ve bu hızlar zaman içinde entegre edildiği , küçük rastgele dalgalanmalar bile önemli bir açı kaymasına yol açar. Etkisini hissetmek için dakikalar veya saatler harcamanıza gerek yok; yüksek hassasiyetli platformlarda ARW, doğruluğu saniyeler içinde düşürmeye başlar .
Navigasyonun Görünmez Tavanı
ARW, harici düzeltmeler (GNSS veya manyetometreler gibi) mevcut olmadığında IMU'nuzun güvenilir yönlendirme sağlayabileceği süreye kesin bir sınır alttaki jiroskopun görev süresi için çok yüksek bir ARW'ye sahip olması . Bu bir yazılım sorunu değil, bir fizik kısıtlamasıdır. Tasarladığım her atalet sisteminde, ARW'yi öğrendikten sonra, navigasyonun ne zaman başarısız olacağını tahmin edebilirim. Ve bu çok güçlü bir şey.
ARW, Bias Kararsızlığından Nasıl Farklıdır?
| Açı Rastgele Yürüyüş (ARW) | Önyargı dengesizliği |
|---|---|
| Kısa süreli gürültü. Jiroskop çıkışında anında küçük rastgele dalgalanmalar şeklinde belirir. | Orta ve uzun vadeli sürüklenme. Sıfır faiz oranı seviyesinin zaman içinde yavaş yavaş dalgalanması. |
| √zamanla artar. Yönlendirme hatasının sürekli birikmesine neden olur. | Allan varyans grafiklerinde düz bir plato vardır |
| Öngörülemez ama sınırlıdır. İstatistiksel olarak modellenebilir, ancak kaldırılamaz. | Yavaş yavaş değişir. Genellikle modellenir ve filtrelerle kısmen telafi edilir. |
| Kısa süreli doğrulukta üstündür. Özellikle hızlı hareket eden, yüksek dinamik sistemlerde kritik öneme sahiptir. | Uzun vadeli hassasiyete hakimdir. Araştırma sınıfı INS veya uzun süreli navigasyon gibi uygulamalarda önemlidir. |
Bu karışıklığın sebebi ne?
Çünkü hem ARW hem de önyargı kararsızlığı kaymaya neden olur; ancak farklı şekillerde ve farklı zaman ölçeklerinde. Atalet sistemleri konusunda yeni olan mühendisler , önyargı kaymasının navigasyon hatasının tek kaynağı olduğunu düşünerek bunları sıklıkla birbirine karıştırırlar. Deneyimlerime göre, taktik görevlerde performansı sınırlayan şey genellikle ARW'dir , özellikle de GNSS olmadan çalışma süresinin saatlerle değil dakikalarla ölçüldüğü durumlarda.
Farklı IMU'lar İçin Tipik ARW Değerleri Nelerdir?
Gerçek projelerde nadiren "en iyi IMU . "Bu boyut, ağırlık ve bütçe dahilinde elde edebileceğim en düşük ARW nedir?" diye sorarım . ARW genellikle bir sensörün tüketici sınıfı, taktik sınıfı veya stratejik olup olmadığını sessizce söyleyen özelliktir.
ARW'nin sensör sınıflarına göre dağılımını şöyle gördüm:
| IMU Sınıfı | Tipik ARW (°/√h) | Ait Olduğu Yer |
|---|---|---|
| Tüketici MEMS | 1 – 10 | Telefonlar, giyilebilir cihazlar, giriş seviyesi robotik |
| Endüstriyel MEMS | 0.1 – 1 | GNSS'li İHA'lar, hafif otonom platformlar |
| Taktik MEMS | 0.05 – 0.1 | Savunma İHA'ları, silah sabitleme, araçlar |
| Navigasyon sınıfı FOG | 0.001 – 0.01 | Denizcilik, havacılık, demiryolu, uzun ömürlü İHA'lar |
| Stratejik RLG | < 0.001 | Denizaltılar, kıtalararası balistik füzeler, yüksek güvenlikli askeri sistemler |
ARW'yi tasarım kararlarında bir kesme filtresi gibi kullanıyorum.
Sistemimin GNSS olmadan 30 dakika dayanması ve 1° istikamet hassasiyetini koruması gerekiyorsa, 0,2°/√h'lik MEMS üniteleri yeterli olmayacaktır. Taktiksel MEMS'ler ancak idare edebilir. Bundan daha fazla performansa ihtiyacım varsa, ya SİS ya da hiç.
Sırada Ne Var?
Artık ARW'nin ne olduğu, nasıl ölçüldüğü ve neden önemli olduğu konusunda net bir anlayışa sahip olmalısınız. Ancak teori denklemin sadece yarısı. Bu serinin ikinci bölümünde, ARW'nin gerçek sistemlerde nasıl ortaya çıktığını (İHA sürüklenmesinden yalnızca eylemsiz görevlere kadar) ve bizim gibi mühendislerin bunu nasıl temel alarak tasarımlar yaptığını ele alacağım. Taktiksel konulara gireceğiz: yazılım sınırlamaları, mekanik izolasyon, füzyon stratejileri ve kritik uygulamalar için kesin ARW eşikleri.
→ 2. Bölüme devam edin: ARW'yi Düşünerek Tasarım
