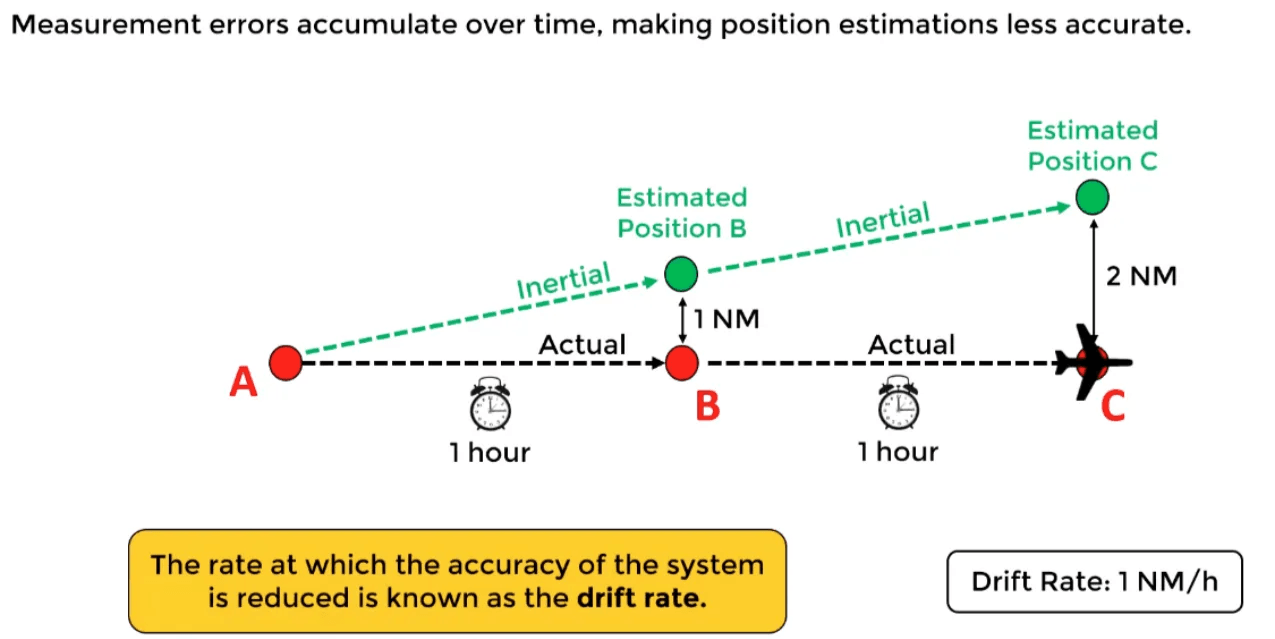
Ataletsel navigasyon sistemleri (INS) bağlamında , DRIFF zaman içinde kademeli olarak hata birikimini ifade eder, bu da sistemin ölçümlerinin (konum, hız veya başlık gibi) yavaş yavaş daha az doğru hale gelmesine neden olur.
İşte böyle çalışıyor:
- Dış düzeltme yok : INS'de, konum ve yön gibi şeyleri hesaplamak için ivmeölçerler ve jiroskoplar gibi sensörler kullanılır. Bununla birlikte, bu sensörler mükemmel değildir ve küçük hataları zamanla birikebilir.
- Küçük hatalar ekleniyor : Ölçümde küçük bir hata bile (konumdaki küçük bir kayma veya dönüşte hafif bir hata gibi) zaman geçtikçe büyüyebilir ve sistemin gerçek değerden “sürüklenmesine” neden olabilir.
Neden önemli:
Sürüklenme, INS'de yaygın bir zorluktur, çünkü sistem çalışmaya devam ettikçe artan hataların yol açar. Harici kaynaklardan (GP'ler gibi) düzeltmeler olmadan, sürüklenme, sistemin bir süre sonra yanlış sonuçlar vermesine neden olarak navigasyon sisteminin genel doğruluğunu etkileyebilir.