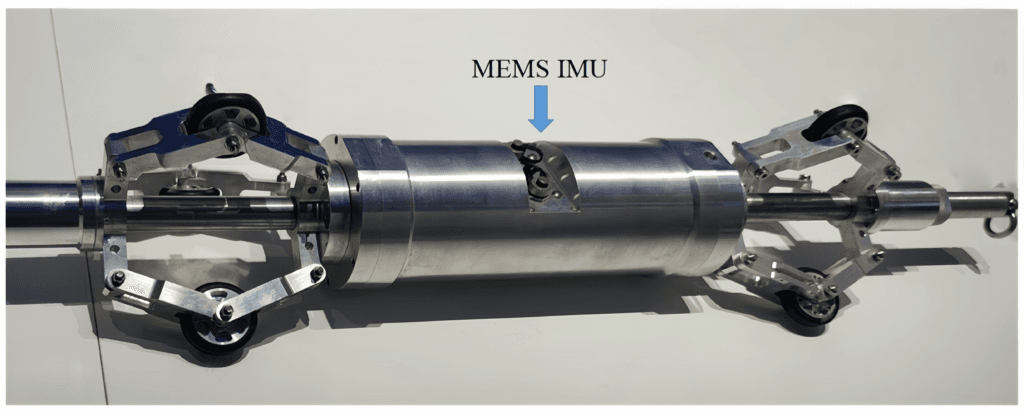
Yer altı ve deniz altı boru hatlarının incelenmesi zordur çünkü GPS sinyalleri, ışık ve manyetik referanslar boruların içinde kaybolur. Kameralar ve kodlayıcılar gibi geleneksel sensörler kaygan veya eğimli yüzeylerde hassasiyetini kaybeder ve bu da kusur tespitini güvenilmez hale getirir. GNSS'in yasak olduğu bu ortamlarda, MEMS Atalet Ölçüm Birimleri (AÖB'ler) bağımsız bir navigasyon çözümü sunar. Kompakt, düşük güç tüketimli ve titreşime dayanıklı bu MEMS tabanlı atalet sensörleri, boru hattı inceleme robotlarının kararlı bir yönelim sağlamasını, hassas hareketi ölçmesini ve yüzeyin yüzlerce metre altında bile kusurları doğru bir şekilde haritalamasını sağlar.
MEMS IMU'lar, GNSS'in yasak olduğu ortamlarda çalışan boru hattı denetim robotları için hassas ataletsel navigasyon sağlar. Kararlı tutum, hız ve konum verileri sağlayarak, sınırlı yeraltı veya deniz altı boru hatlarında güvenilir hata haritalaması, sorunsuz yörünge kontrolü ve sürekli çalışma sağlarlar.
GNSS ve görsel ipuçlarının ortadan kalktığı bir boru hattının içinde, navigasyon tamamen MEMS IMU'lara bağlıdır. Bu kompakt atalet sensörleri, sürekli bir hareket profili oluşturmak için açısal hızı ve ivmeyi yakalar. Bir boru hattı muayene robotu için doğru atalet navigasyonu, robotun tam konumunu, tutumunu ve hızını bilmek anlamına gelir; bu da güvenilir kusur tespiti ve haritalamasının temelidir.
İçindekiler
GNSS'in Reddettiği Boru Hatlarında Navigasyon Zorluğu
boru hattı inceleme robotu için navigasyon en zor sorundur. Metal boru hatlarının derinliklerinde GNSS sinyalleri tamamen engellenir ve manyetik sensörler bile güvenilirliğini kaybeder. Doğru hareket takibini sağlamanın tek yolu, MEMS IMU tarafından desteklenen atalet navigasyonudur . IMU, açısal hızı ve doğrusal ivmeyi sürekli ölçerek robotun gerçek zamanlı yönelimini, hızını ve konumunu hesaplamasına yardımcı olur. Herhangi bir sapma dengesizliği veya entegrasyon kayması büyük haritalama hatalarına neden olabilir; bu nedenle yüksek performanslı GuideNav MEMS IMU'ları, GNSS'nin engellendiği ortamlarda hassas yeraltı incelemesi için olmazsa olmazdır .

MEMS IMU Teknolojisi Neden Boru Hattı Muayene Robotlarına Mükemmel Bir Şekilde Uyar?
Kompakt. Sağlam. Hassas.
Dar bir çelik boru hattının içinde her milimetrenin, her wattın önemi vardır.
İşte tam bu noktada MEMS IMU'nun yeri doldurulamaz olduğu ortaya çıkıyor.
- Kompakt ve Hafif: Alanın sınırlı olduğu küçük çaplı boru hattı muayene robotlarına
- Düşük Güç ve Verimlilik: Güç sistemlerini aşırı yüklemeden uzun süreli dayanıklılık görevlerini destekler.
- Titreşime Dayanıklı: 20 g RMS titreşim altında bile atalet navigasyonunu korur
- Sıcaklığa Dayanıklı: -40 °C ile +85 °C arasında güvenilir şekilde çalışır.
Hantal FOG ünitelerinin aksine, MEMS tabanlı atalet sistemi, GNSS'in yasak olduğu yeraltı ortamları için ideal olan minyatür bir form faktöründe yüksek hassasiyetli hareket verileri sunar .
Ham Hareket Verilerinden Hassas Konum Haritalamasına
GNSS'in izin vermediği bir boru hattında , boru hattı muayene robotunun kendi kendine ölçülmelidir.
MEMS IMU, hassas bir hesaplamalı iş akışı aracılığıyla atalet navigasyon dönüştürür
Adım 1 Hareketi Algılama
Yüksek kaliteli MEMS jiroskopları açısal hızı ölçerken, MEMS ivmeölçerleri doğrusal ivmeyi algılar.
Hepsi birlikte robotun iç hareket referansının temelini oluştururlar.
Adım 2 Entegrasyon ve Hesaplama
Yerleşik işlemci, gerçek zamanlı tutum , hız ve pozisyonu
tahmini navigasyonun özüdür .
Adım 3 Kusur Yerelleştirme
Kameralar veya ultrasonik problar korozyonu veya çatlakları tespit ettiğinde, GuideNav MEMS IMU doğru mekansal koordinatlar sağlar.
Bu, mühendislerin her kusuru boru hattı boyunca tam konumuna bağlamasını sağlar.
4. Adım Harita Oluşturma
, yapısal bütünlük raporlarını fiziksel koordinatlarla hizalayan yüksek çözünürlüklü bir boru hattı inceleme haritası MEMS IMU'lar tarafından desteklenen atalet navigasyonu
Kısacası: Ham hızlanmadan hassas haritalamaya kadar sürecin her aşaması, zorlu yer altı veya deniz altı ortamlarında çalışan bir GuideNav MEMS IMU'nun doğruluğuna ve önyargı kararlılığına dayanır.

Yeraltı Navigasyonunda Önyargı Kararlılığının Rolü
Önyargı İstikrarı Neden Önemlidir?
Bir boru hattı muayene robotunda her türlü kayma derecesi önemlidir.
GNSS'in izin vermediği uzun boru hatlarının içinde , küçük bir IMU sapması saatlerce süren yolculuktan sonra büyük konumsal hatalara yol açabilir.
Örneğin, 1°/h'lik bir jiroskop sapması, robotun hesaplanan konumunun birkaç metre sapmasına neden olabilir; bu da bir korozyon bölgesinin yanlış etiketlenmesine yol açabilir.
Önyargı Kaymasına Ne Sebep Olur?
MEMS IMU'daki önyargı kararsızlığı genellikle şunlardan kaynaklanır:
- Boru hattı içindeki sıcaklık dalgalanması
- Uzun vadeli titreşim ve mekanik stres
- MEMS elemanlarının üretim çeşitliliği ve yaşlanması
ataletsel navigasyon kademeli olarak bozarak hatalı haritalama ve yanlış konumsal verilere neden olur.
Endüstriyel MEMS IMU'lar Bunu Nasıl Çözer?
GuideNav MEMS IMU'lar gibi yüksek kaliteli endüstriyel sensörler şunları kullanır:
- Kapalı devre dijital kompanzasyon
- Çoklu sıcaklık kalibrasyonu
- Kalman filtrelemesi yoluyla gerçek zamanlı önyargı tahmini
Bu, mükemmel bir önyargı kararlılığı sağlayarak, boru hattı inceleme robotunun minimum sürüklenmeyle birkaç kilometre yol almasına olanak tanır.
hassas altyapı denetimi için kullanılan endüstriyel MEMS ataletsel navigasyon sistemleri arasındaki farkı tanımlar
Titreşimle Mücadele - Mekanik ve Algoritmik Dengeleme
ataletsel navigasyonu bozan sürekli titreşimler yaratır .
Düşük dereceli MEMS IMU'lar genellikle bu salınımları gerçek hareket olarak yanlış okur ve bu da boru hattı muayene robotlarında .
GuideNav MEMS IMU'ları bu sorunu mikro sönümlü mekanik tasarım, dijital filtreleme ve titreşim kaynaklı önyargıyı gerçek zamanlı olarak ortadan kaldıran uyarlanabilir Kalman algoritmalarıyla çözüyor.
Sıcaklık Stabilitesi ve Termal Kalibrasyon
MEMS IMU okumalarını bozabileceği sıcak kompresör bölgelerine kadar uzanan ortamları kapsar
boru hattı muayene robotlarında navigasyon kaymasına yol açar .
Bunun önüne geçmek için GuideNav MEMS IMU'ları çok noktalı sıcaklık kalibrasyonu ve dijital termal kompanzasyon modelleri –40 °C ile +85 °C arasında önyargı kararlılığını garanti eder.
, uzun süreli görevlerde, ciddi çevresel değişiklikler altında bile tutarlı ataletsel navigasyon GNSS'in reddedildiği yer altı veya deniz altı operasyonları .
Sensör Füzyonu — Uzun Vadeli Doğruluğun Anahtarı
En kararlı MEMS IMU zamanla kayma biriktirir.
Boru hattı muayene robotlarında doğruluğun korunması için , ham atalet navigasyon verilerinin tekerlek kodlayıcılar, basınç sensörleri veya ultrasonik mesafe bulucularla birleştirilmesi gerekir.
Kalman filtreleme veya hata durumu birleştirmeyi kullanan GuideNav MEMS IMU'ları , bu sinyalleri birleştirerek sürekli olarak önyargıyı tahmin eder ve düzeltir.
Bu çoklu sensör yaklaşımı, kümülatif hatayı en aza indirerek uzun mesafelerde hassas yörünge ve hata lokalizasyonu sağlar.
GNSS'in yasak olduğu ortamlarda , bu tür akıllı sensör füzyonu , ham atalet verilerini güvenilir, gerçek dünya navigasyon performansına dönüştüren şeydir.
Gözetimsiz kayma anında bir arızaya neden olmaz, ancak zamanla hassasiyeti sessizce aşındırır fabrika kalibrasyonu, FOG IMU'yu orijinal performans sınırları içinde tutar.
MEMS IMU Entegrasyonu için Mühendislik Hususları
En hassas MEMS IMU kötü monte edildiğinde performansını kaybedebilir.
Bir boru hattı muayene robotunda ataletsel navigasyon hassas mekanik hizalama ve sağlam montaj hayati önem taşır .
IMU eksenleri ile robotun gövde çerçevesi arasındaki hizalama hatası, hiçbir yazılımın tam olarak düzeltemeyeceği ölçek faktörü ve eksenler arası hatalara neden olabilir.
GuideNav MEMS IMU'ları 200 ppm ortogonaliteye kadar kalibre edilmiştir ve endüstriyel kontrolörlerle kolay entegrasyon için RS-422 veya CAN arayüzleri
GNSS'in engellendiği yer altı boru hatlarında güvenilir navigasyona olanak tanır .
Geleceğe Bakış — MEMS IMU, Otonom Boru Hattı Robotlarının Beyni Olarak
Yeni nesil boru hattı denetim robotları tam otonomiye doğru ilerliyor.
MEMS IMU, özünde GNSS'in engellendiği ortamlarda sürekli ataletsel navigasyon hassas hareket kontrolü ve hata haritalamasını mümkün kılar.
GuideNav MEMS IMU'larını yapay zeka analitiğiyle entegre edecek
