Yüksek hassasiyetli MEMS IMU'lar entegrasyon sonrasında genellikle düşük performans gösterir. Sapma, hizalama hatası ve çevresel faktörler, saha arızaları ortaya çıkana kadar doğruluğu sessizce aşındırır. Gerçek hassasiyeti korumak için dört kurala uyun: katı hizalama, kontrollü ortam, periyodik kalibrasyon ve disiplinli çalışma.
Yüksek hassasiyetli MEMS IMU'lar, eşsiz hareket algılama performansı sunar; ancak bu performans yalnızca doğru kullanıldığında geçerlidir. Bu makale, doğruluk kaybına sıklıkla neden olan dört kritik kullanım hatasını ve bunların gerçek dünya entegrasyonunda nasıl önleneceğini ortaya koymaktadır.
Yüksek hassasiyetli MEMS IMU'lar, dronlardan otonom araçlara kadar modern navigasyonun omurgasını oluşturuyor. Ancak en üst düzey sensörler bile yanlış kullanıldığında performans gösteremez. Bu kılavuz, doğruluğu sessizce bozan gizli tuzakları ortaya çıkarıyor ve entegratörlerin bunları nasıl önleyebileceğini gösteriyor.
İçindekiler
Kurulum: Her Yüksek Hassasiyetli MEMS IMU'nun Başlangıç Noktası
Sağlam bir şekilde monte edin, yumuşak bir şekilde değil
Bir MEMS IMU yalnızca kendi hareketini bildirir, bu nedenle platformun hareketine tam olarak paralel hareket etmelidir. Güvenilir sonuçlar için, üniteyi metal veya karbon fiber braketler kullanarak doğrudan sağlam bir yapıya sabitleyin. Esneyen veya titreşimi emen kauçuk pedler veya diğer yumuşak malzemelerden kaçının; bunlar mekanik bağlantıyı kırar ve sensör verilerini bozar.
Titreşim izolasyonu kaçınılmazsa, dikkatlice tasarlanmalı ve sönümleme özelliklerinin IMU'nun çıkış frekansını veya faz tepkisini bozmadığından emin olunmalıdır.
Eksenleri Mükemmel Şekilde Hizalayın
Küçük bir açısal sapma bile büyük konum hatalarına neden olabilir. Yüksek hassasiyetli bir MEMS IMU'nun yalnızca bir derece yanlış hizalanması durumunda, ortaya çıkan sapma uzun süreli çalışma sonrasında kilometrelere ulaşabilir. IMU'nun eksenlerini daima aracın referans çerçevesiyle hizalayın veya kurulumdan sonra hassas hizalama kalibrasyonu uygulayın.
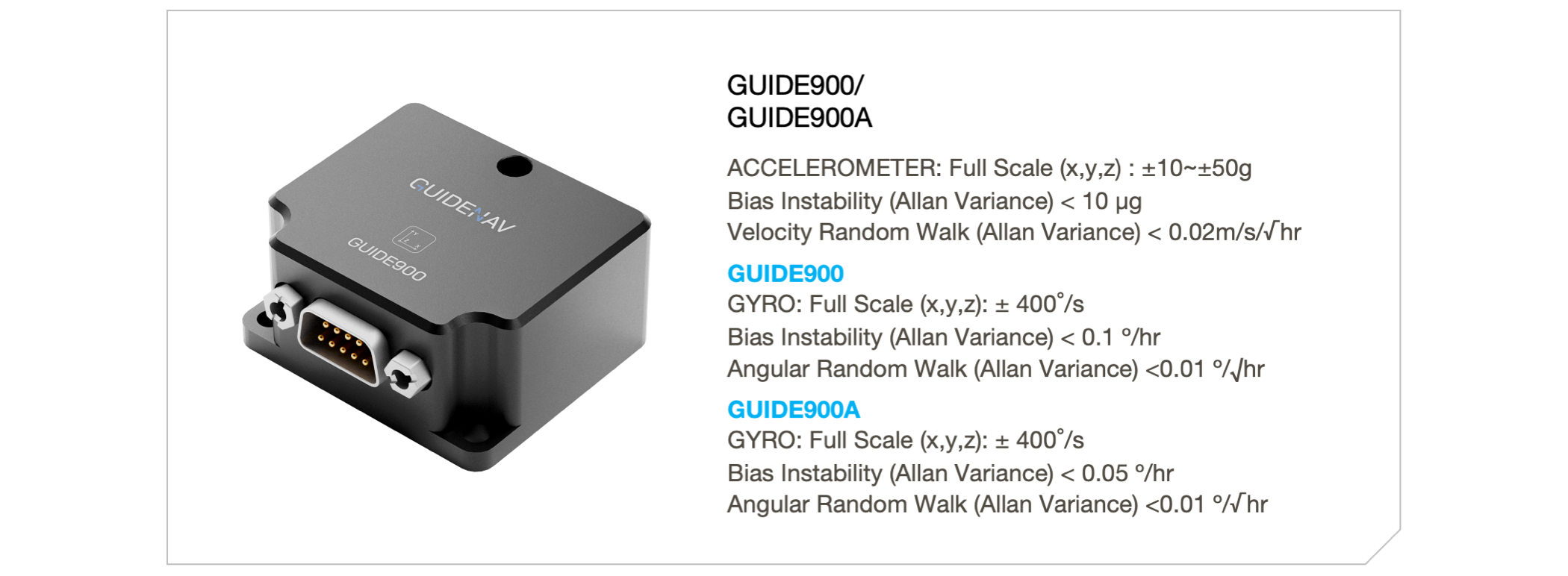
GuideNav MEMS IMU GUIDE900 , fabrika kalibrasyonunda 100 ppm'den daha düşük ölçek faktörü doğrusal olmayanlığına ve 200 ppm'nin altında çapraz eksen bağlantısına sahiptir; ancak kötü kurulum hizalaması bu hassasiyeti hızla ortadan kaldırabilir.
Titreşim ve Stres Bölgelerinden Uzak Durun
Sürekli titreşim veya yapısal gerilim, MEMS IMU'nun iç özelliklerini kademeli olarak değiştirir. Sensörü motorların, şanzımanların veya kaynaklı bağlantıların yakınına monte etmekten kaçının. Zamanla, bu mekanik etkiler sapmaya neden olabilir ve uzun vadeli kararlılığı azaltabilir.
Çevresel Kontrol: IMU Doğruluğunun Gizli Düşmanı
Sıcaklık Dengesi Her Şeydir
Yüksek hassasiyetli MEMS IMU'larda sapmanın en yaygın nedeni sıcaklıktır. Her sensörün tanımlanmış bir termal çalışma aralığı vardır; tipik olarak -40 °C ila +85 °C arasındadır. Ani dalgalanmalar sıfır sapmasını veya ölçek faktörünü değiştirebilir.
MEMS IMU'yu gerekirse yalıtım, kontrollü hava akışı veya ısıtma elemanları kullanarak stabil bir ortamda tutun. Tüm GuideNav MEMS IMU'ları, tüm aralık boyunca tamamen sıcaklık kompanzasyonludur ve aşırı koşullarda tutarlı doğruluk sağlar.
Nem, Hassasiyete Sessizce Zarar Verebilir
Nem, görünmez bir diğer tehdittir. Nem oranı %85 RH'yi aştığında, paketin içine sızabilir, devreleri aşındırabilir ve sensör davranışını değiştirebilir. Kısa süreli yoğuşma bile geçici sapma sıçramalarına neden olabilir. Deniz veya tropikal iklimlerde çalışırken, yüksek hassasiyetli IMU'yu her zaman nem çekici maddelerle dolu, sızdırmaz bir muhafaza içinde koruyun.
Elektromanyetik Girişimden (EMI) Kaçının
Yüksek akım hatları ve anahtarlamalı güç dönüştürücüler, MEMS IMU'nun analog ön ucuna gürültü enjekte edebilir. Paraziti önlemek için, güç kablolarını sinyal hatlarından ayırın, uygun topraklamayı sağlayın ve korumalı kablolar kullanın. Temiz bir elektromanyetik ortam, uzun vadeli hassasiyeti sürdürmek için mekanik kararlılık kadar önemlidir.
Kalibrasyon: Yüksek Hassasiyetli MEMS IMU'nun Can Damarı
Fabrika Kalibrasyonu Sonsuza Kadar Sürmez
Her MEMS IMU, fabrika çıkışında sapma, ölçek faktörü ve ortogonallik açısından kalibre edilmiş olarak gelir; ancak bu parametreler sıcaklık değişimleri, titreşim ve mekanik stres nedeniyle zamanla sapma gösterir. Yüksek hassasiyetli bir IMU'nun belirtilen özelliklere uygun performans göstermesi için, 6-12 ayda bir veya kritik sistemler için daha kısa sürede periyodik yeniden kalibrasyon planlanmalıdır.
Doğru Kalibrasyon Yaklaşımını Seçin
IMU'yu çıkarmak pratik değilse, statik hizalama rutinleri veya GNSS destekli tahmin kullanarak yerleşik veya gerçek zamanlı kalibrasyon gerçekleştirin.
Ancak, hassasiyetin tam olarak geri kazanılması, bir hız tablosunda veya termal odada laboratuvar kalibrasyonu gerektirir. Bu yöntem, altı eksenin tamamını düzeltir ve sıcaklığa bağlı sapmayı telafi ederek MEMS IMU'nun çeşitli ortamlarda taktiksel düzeyde performans göstermesini sağlar.
Sonucu her zaman doğrulayın
Kalibrasyon, doğrulanana kadar tamamlanmış sayılmaz. Stabilite ve doğruluğu teyit etmek için kalibrasyon sonrası verileri referans hareket profilleri veya gerçek veri sensörleriyle karşılaştırın.
Doğrulama işleminin ihmal edilmesi, performansı sessizce düşüren gizli hatalara yol açabilir ve bu da yeniden kalibrasyonun amacını boşa çıkarır.
Operasyon ve Kullanım: Hassasiyet Ayrıntılarda Gizlidir
Verilere güvenmeden önce ısınma hareketleri yapın
Bir MEMS IMU'nun, güç açıldıktan sonra termal ve elektronik kararlılığa ulaşması zaman alır. Çoğu yüksek hassasiyetli IMU, modele ve ortama bağlı olarak 1-30 dakika arasında bir ısınma süresi gerektirir. Verilerin çok erken toplanması, nominal değerinden birkaç kat daha yüksek geçici sapmaya neden olabilir.
Sık sık güç döngüsünden kaçının
IMU'yu tekrar tekrar açıp kapatmak, dahili filtrelerini sıfırlar ve geçici sapma değişikliklerine neden olur. Tutarlı performans ve sorunsuz veri devamlılığı sağlamak için kritik veri toplama sırasında MEMS IMU'yu sürekli olarak çalışır durumda tutun.
Özenle Kullanın — Her Zaman
Sağlam tasarımlarına rağmen, yüksek hassasiyetli MEMS IMU'lar hassas mikro yapılar içerir. Düşmeler, darbeler veya yanlış kullanım, doğrulukta ince ama kalıcı bir bozulmaya neden olabilir. Taşıma sırasında, yastıklı kaplar kullanın ve bağlantı noktalarını sabitleyin. Kabloları, bağlantı elemanlarını ve gövdeleri düzenli olarak kontrol edin; mekanik gerilim veya gevşek kablolama genellikle sensör kaymasının öncüsüdür.

GuideNav Uzman Görüşü
GuideNav'da, basit bir gözden kaçırmanın -yanlış montaj, atlanmış kalibrasyon veya termal kayma- yüksek hassasiyetli bir MEMS IMU'yu nasıl güvenilmez bir sensöre dönüştürebileceğini gördük. Gerçek dünya entegrasyonu asla sadece teknik özelliklerle ilgili değildir; kurulum, kalibrasyon ve uzun vadeli bakımda disiplinle ilgilidir.
Bu nedenle GuideNav MEMS IMU'ları, tutarlı ve sahada kanıtlanmış doğruluk talep eden profesyonel entegratörler için tasarlanmıştır. Her bir ünite tamamen sıcaklık kompanzasyonludur, ortogonal olarak kalibre edilmiştir ve en zorlu titreşim ve çevre koşullarına dayanacak şekilde tasarlanmış sağlam bir alüminyum gövde ile korunmaktadır.
Projeniz ister İHA'lar, ister otonom araçlar veya endüstriyel robotlar içeriyor olsun, doğru uygulamaları kullanmak MEMS IMU'nuzun tam olarak tasarlandığı gibi çalışmasını sağlayacaktır: istikrarlı, güvenilir ve görev açısından kritik işler için hazır.
