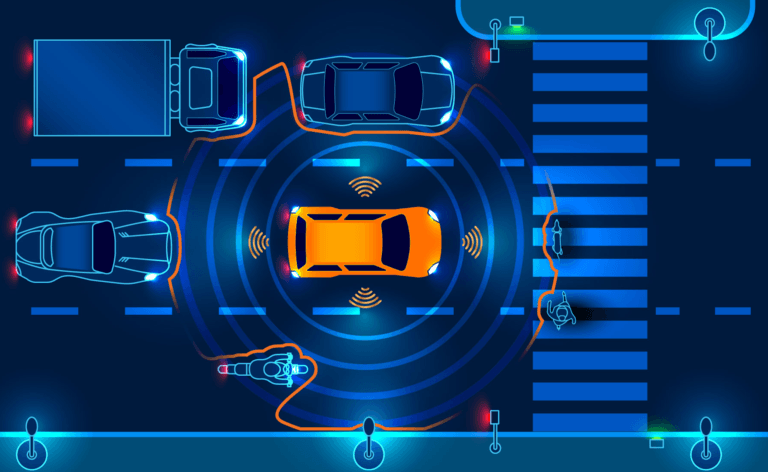
Otonom araçlar, tam konumlarını bilmeden güvenli bir şekilde hareket edemezler; ancak 1-3 metrelik hata payına sahip sıradan GPS, şerit düzeyindeki kararlar için çok kaba kalır. Şehir içi kanyonlarda veya tünellerde sinyaller tamamen kaybolur ve sistem "kör" kalır. Santimetre düzeyinde doğruluk elde etmek için, modern sürücüsüz araç platformları, her sürüş koşulunda sürekli ve güvenilir konum belirleme sağlamak amacıyla GNSS, IMU, LiDAR ve görsel algılamayı birleştiren çoklu sensör füzyonuna güvenmektedir.
Otonom araçlar, GNSS/INS entegrasyonu, LiDAR haritalama ve görsel algılama yoluyla santimetre düzeyinde doğruluk elde ederken, GPS sinyallerinin kesilmesi durumunda yüksek hassasiyetli IMU'lar konum belirlemenin temelini oluşturur.
Konum belirleme, otonom sürüşün görünmeyen omurgasıdır. Uydular kaybolsa bile, bir araca tam olarak nerede olduğunu söyler. IMU, GNSS, LiDAR ve kamera verilerini birleştirerek, modern sistemler her yol, tünel ve kentsel kanyonda hassas konumlandırmayı korur.
İçindekiler
Otonom Yerelleştirmenin Temel Teknolojileri
Modern otonom sürüş konumlandırması , algılama ve navigasyonda benzersiz bir role sahip dört ana algılama teknolojisini bir araya getiriyor:
- GNSS (Küresel Navigasyon Uydu Sistemi): Küresel koordinatlar ve mutlak konum referansı sağlar.
- INS (Ataletli Navigasyon Sistemi): GNSS sinyallerinin kesilmesi durumunda oluşan boşlukları doldurarak, ivmeölçerler ve jiroskoplar aracılığıyla hareketi izler.
- LiDAR (Işık Algılama ve Menzil Belirleme): Santimetre düzeyinde mekansal eşleştirme için 3 boyutlu çevre haritaları oluşturur.
- Görüntüleme sistemleri: Anlamsal anlama için şerit işaretlerini, trafik levhalarını ve yer işaretlerini belirlemek amacıyla kameralar kullanır.
Bu sistemler birlikte, karmaşık yol, hava ve aydınlatma koşulları altında hassas konum belirlemeyi sağlayan yedekli ve tamamlayıcı bir mimari GNSS başlangıç noktası olmaya devam etmektedir ve sınırlamaları, birleştirmenin neden gerekli olduğunu ortaya koymaktadır.
GNSS Tek Başına Otomobilleri Otonom Hale Getiremez Neden?
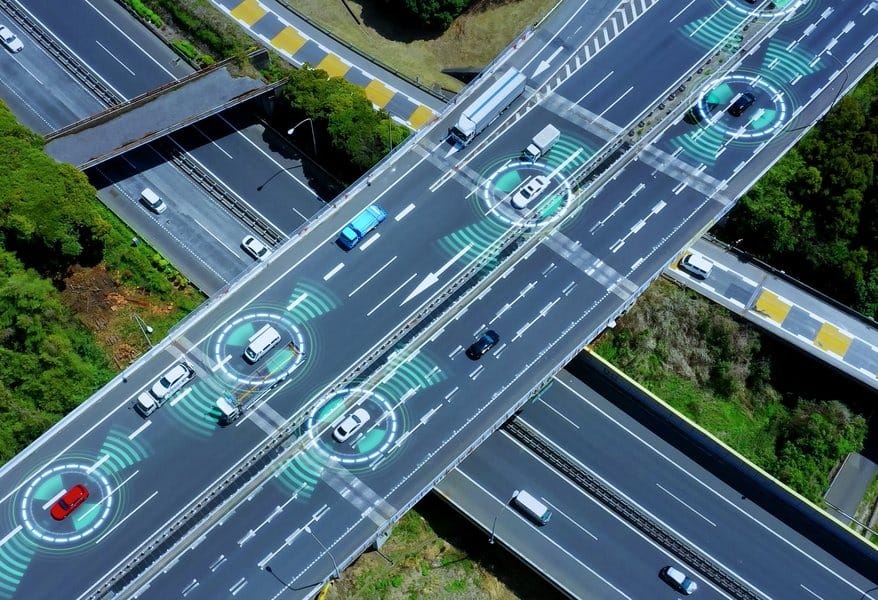
Standart GPS 1-3 metre doğruluk sunar ; bu, telefonlar için yeterli olsa da, sürücüsüz araçlar . Küçük bir sapma bile aracın şerit çizgilerini veya dönüşü yanlış algılamasına neden olabilir.
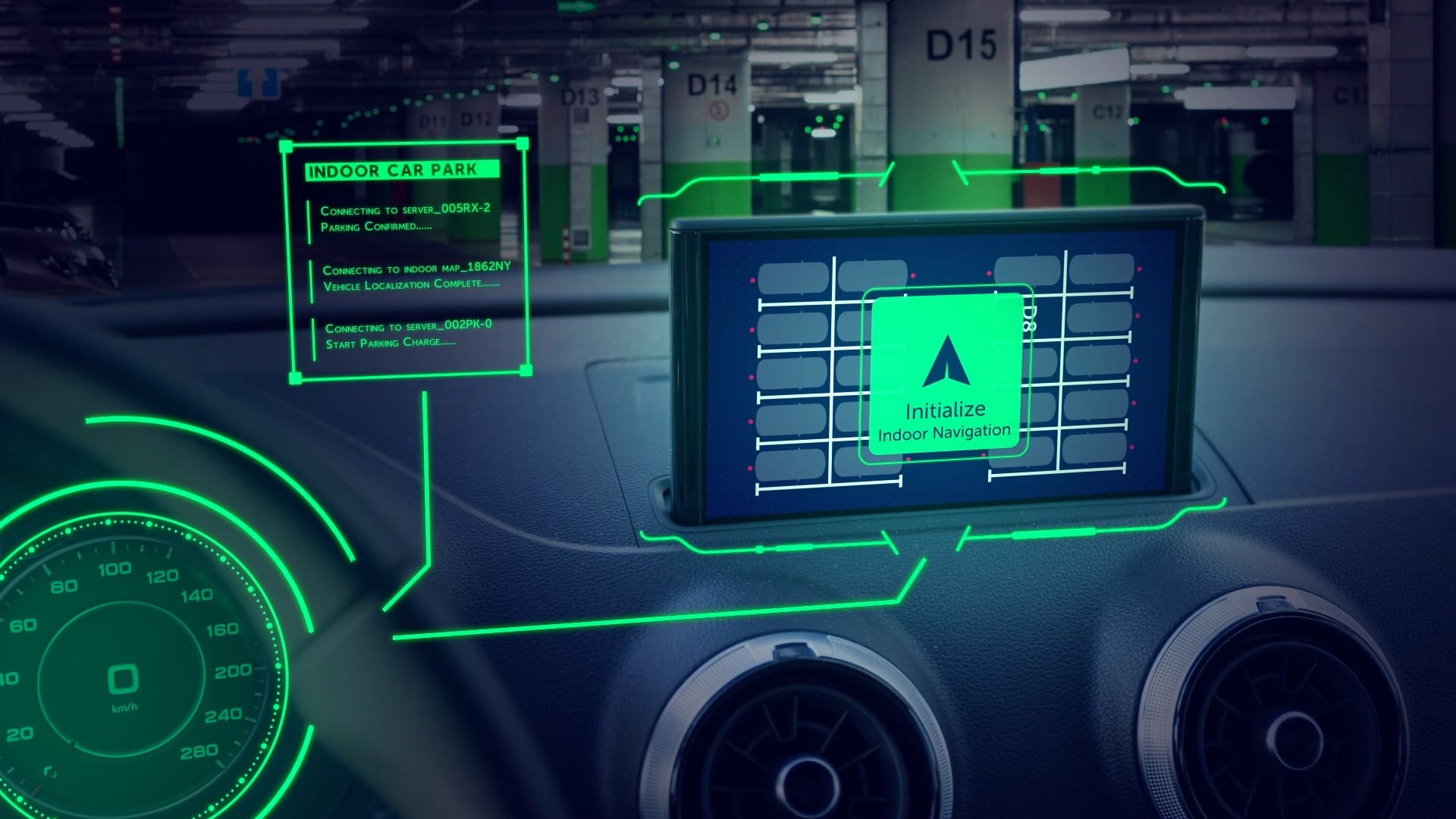
Şehir kanyonlarında veya tünellerinde sinyaller seker veya tamamen kaybolur ve çoklu yol hataları otonom sistemlerin sürekli, santimetre düzeyinde konum belirleme sensör füzyonuna ihtiyaç duyduğunu kanıtlar .
Otonom Sürüş için GNSS Doğruluğunu Artırma
GPS iyileştirmek için , otonom sistemler RTK gibi GNSS düzeltme yöntemleri Referans istasyonlarından gerçek zamanlı hata verileri alarak 5-10 cm doğruluk seviyesine ulaşabilir şerit düzeyinde konumlandırmayı mümkün kılar .
Ancak GNSS açık gökyüzü görüşüne ve istikrarlı iletişime bağlıdır . Tünellerde veya kentsel alanlarda sinyaller bozulur veya kaybolur; bu da uydu konumlandırmasının tek başına yetersiz olduğunu sürekli konum belirleme INS ile desteklenmesi gerektiğini .
GNSS arızalandığında, INS aracı durumdan haberdar eder
Uydular kaybolduğunda, Ataletli Navigasyon Sistemi (INS) devreye girer. Araç üzerindeki Atalet Ölçüm Birimi (IMU) , ivme ve açısal hız yoluyla hareketi izler ve böylece araç, harici sinyaller olmadan bile konumunu "tahmini olarak" belirleyebilir.
Bu bağımsızlık, INS'yi tüneller, alt geçitler veya kentsel kanyonlar arasında bir köprü . Ancak, hatalar zamanla birikerek kademeli sapmaya . Hassasiyetini korumak için INS'nin GNSS veya LiDAR ve kameralar .
INS'nin İç Yüzü: Ataletsel Konumlandırmanın Özü
Ataletsel Navigasyon Sistemi (INS), otonom konumlandırmanın kalbidir; araçların dış sinyaller kaybolduğunda bile konumlarını, hızlarını ve yönelimlerini takip etmelerini sağlayan, kendi kendine yeten bir navigasyon çözümüdür.
Bir INS'yi oluşturan unsurlar nelerdir?
- Üç adet jiroskoptan oluşan bir set, dönme hareketini yakalamak için açısal hızı ölçer.
- Üç adet ivmeölçerden oluşan bir set, tüm eksenler boyunca doğrusal ivmeyi ölçer.
- Bu sensörler bir araya gelerek, aracın en ufak hareketlerini bile gerçek zamanlı olarak sürekli algılayan Atalet Ölçüm Birimi (IMU)
INS nasıl çalışır?
INS, IMU ölçümlerini entegre ederek aracın yönelimini, hızını ve konumunu başlangıç referansına göre hesaplar. GNSS sinyalleri kaybolsa , sistem ölü hesaplama ederek kesintisiz ve sorunsuz konum belirleme çıktısı sağlar.
INS kalitesi neden önemlidir?
Bir INS'nin doğruluğu, sapma kararlılığı , açısal rastgele yürüyüş (ARW) ve sıcaklık telafisi . Yüksek kaliteli bir INS, GNSS'nin bulunmadığı ortamlarda tünellerde, şehirlerde ve kapalı güzergahlarda tutarlı navigasyon sağlar.
INS ve GNSS Füzyonu: Sektörün Altın Standardı
Tamamlayıcı güçlü yönler
İki sistem de tek başına kusursuz çalışamaz.
GNSS küresel konumlandırma sağlar ancak sinyal engellendiğinde güvenilirliğini kaybeder; INS zamanla kademeli olarak sapma gösteren sürekli hareket takibi sunar.
Bu iki yöntemi birleştirerek, otonom araçlar mutlak doğruluk ve kısa vadeli istikrar .
Füzyon iş başında
Gelişmiş Kalman filtreleme , GNSS ve INS'den gelen veriler gerçek zamanlı olarak birleştirilir:
- GNSS sinyali mevcut olduğunda, INS sapmasını sürekli olarak düzeltir.
- GNSS sinyali kaybolduğunda, INS uydu sinyalleri geri dönene kadar doğru hareket güncellemelerini sürdürür.
Bu tahmin-güncelleme döngüsü, tünellerde veya yoğun kentsel kanyonlarda bile sorunsuz ve güvenilir konum belirleme sağlar.
Endüstri standardı
, modern otonom navigasyonun temel taşı haline gelmiştir .
İyi kalibre edilmiş bir GNSS/INS sistemi, dinamik koşullarda santimetre düzeyinde doğruluk sağlayarak tüm sürüş ortamlarında hem hassasiyeti hem de güvenilirliği garanti eder.
Koordinatlardan Gerçekliğe: Yerelleştirme Matematiği Nasıl Çalışır?
Doğru konum belirleme, iki koordinat sistemi arasında veri dönüştürmeye bağlıdır: araçla birlikte hareket eden araç koordinat sistemi Dünya'ya sabitlenmiş harita koordinat sistemi Dönüş matrisleri veya kuaterniyonlar , ivme ve açısal hız gibi sensör verileri küresel bir referansa dönüştürülür. Bu hizalama olmadan, hassas sensörler bile hareketi yanlış okuyarak sapmaya ve konum hatasına neden olur.
LiDAR'ın Santimetre Seviyesinde Doğruluktaki Rolü
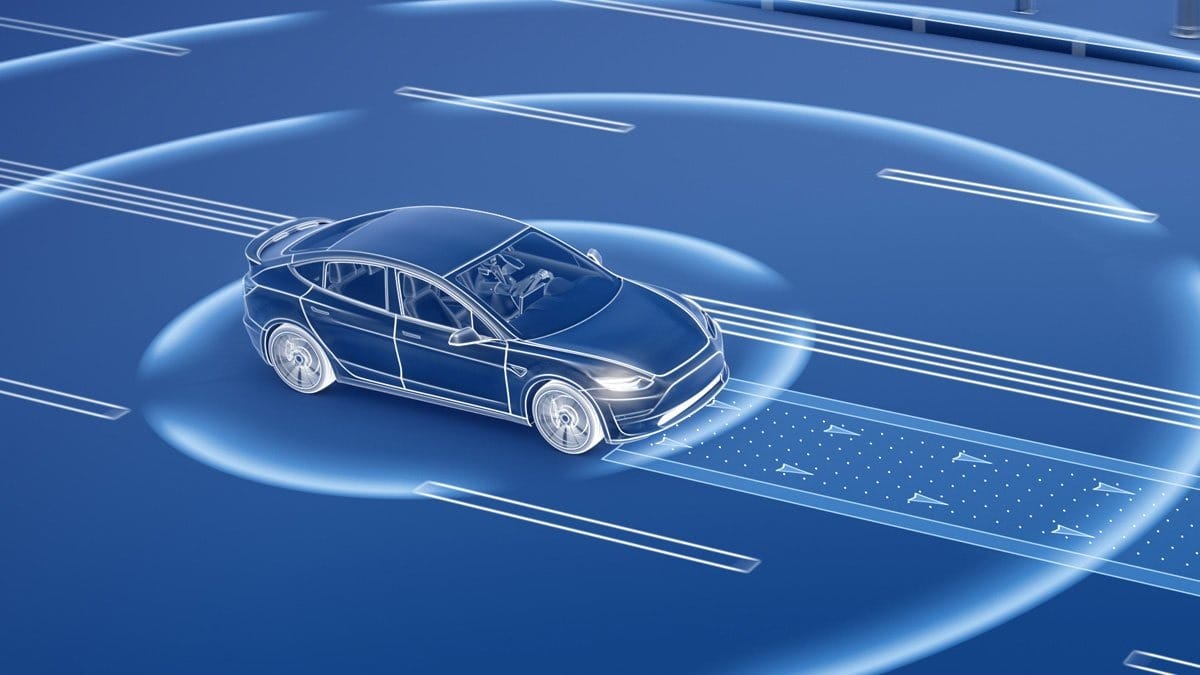
GNSS görüş alanını kaybettiğinde, LiDAR devreye girer.
Uydu tabanlı konumlandırmanın aksine, LiDAR konumlandırma, aracın etrafındaki ortamı "görmek" için gerçek zamanlı 3 boyutlu tarama kullanır.
Çalışma prensibi şu şekildedir:
- LiDAR, nokta bulutları .
- , ICP (İteratif En Yakın Nokta) veya NDT (Normal Dağılım Dönüşümü) gibi algoritmalar kullanılarak yüksek çözünürlüklü bir harita ile eşleştirilir .
- Sistem, aracın konumunu ve yönünü santimetre düzeyinde doğrulukla tahmin etmek için mekansal hatayı en aza indirir.
Neden önemli:
Bu teknik, GNSS sinyallerinin güvenilmez olduğu veya tamamen kaybolduğu tünellerde , kentsel kanyonlarda veya ormanlık yollarda tutarlı
Görmek İnanmaktır: Görsel Konum Belirleme ve Şerit Seviyesinde Haritalama
Otonom sürüş sistemleri geliştikçe, görsel konumlandırma GNSS ve LiDAR'a vazgeçilmez bir tamamlayıcı haline gelmiştir. Uydular küresel erişim sağlarken ve LiDAR geometrik hassasiyet sağlarken, kameralar bağlam ve anlam ekleyerek araçların çevrelerini insanlar gibi yorumlamasını sağlar.
Görme duyusunun yer tespitindeki rolü
Görsel sensörler, otonom navigasyona anlamsal anlayış kazandırıyor. Kameralar şerit işaretlerini , trafik levhalarını ve yol sınırlarını geometrinin ötesinde zengin bir bağlam sağlıyor.
Temel süreç
yüksek çözünürlüklü bir harita ile karşılaştırılır . Algoritmalar görsel özellikleri analiz eder ve olasılıksal tahmin (örneğin parçacık filtreleme) uygular.
Başlıca avantaj
Şerit düzeyinde doğruluk sağlar ve değişen aydınlatma, trafik veya hava koşullarında dayanıklılığı artırır.
Gerçek Dünya Yerelleştirmesini Hala Sınırlayan Zorluklar Nelerdir?
GNSS, IMU, LiDAR ve görüntü işleme teknolojilerinin gelişmiş birleşimine rağmen, gerçek dünya konum belirleme çalışmaları hala büyük pratik engellerle karşı karşıya. Laboratuvarda elde edilen mükemmel doğruluk, her zaman tahmin edilemeyen yollarda aynı sonucu vermeyebilir.
Dinamik ortamlar
Yol yapım çalışmaları, park halindeki araçlar, yayalar ve geçici nesneler, canlı sensör verileri ile önceden oluşturulmuş haritalar arasında uyumsuzluklara neden olur. Bu tutarsızlıklar, kısa vadeli konumlandırma hatalarına yol açabilir.
Harita bakımı
Yüksek çözünürlüklü haritalar sürekli güncelleme gerektirir. Mevsimsel değişiklikler, bitki örtüsünün büyümesi veya küçük yol düzeni değişiklikleri, veritabanına yansıtılmadığı takdirde konum belirleme doğruluğunu düşürebilir.
Sensör kalibrasyonu
Doğru veri birleştirme, LiDAR'lar, kameralar ve IMU'lar arasında hassas hizalamaya bağlıdır. Milimetre ölçeğindeki mekanik kaymalar veya termal genleşme bile açısal hizalama bozukluğuna neden olarak zaman içinde kümülatif sapmaya
IMU Kalitesi Otonom Navigasyonun Geleceğini Neden Belirliyor?
Atalet Ölçüm Birimi (IMU), otonom konumlandırmanın son güvencesidir. GNSS ve görüş sistemleri güvenilirliğini kaybettiğinde, araç gerçek hareketinin farkında kalmasını sağlayan tek unsur IMU'dur. Herhangi bir otonom sürüş sisteminin kararlılığı, IMU'nun zaman içinde yönelimi ne kadar hassas bir şekilde ölçebildiğine ve koruyabildiğine bağlıdır.
Üst düzey IMU'lar, sapma kararlılığı , açısal rastgele yürüyüş (ARW) ve termal dengeleme . Bu parametreler, sistemin harici düzeltme olmadan ne kadar süreyle doğru yön bulma işlemini sürdürebileceğini belirler. Tüketici sınıfı sensörler saniyeler içinde metrelerce sapma gösterebilirken, taktiksel sınıf IMU'lar birkaç dakika boyunca metre altı doğruluk seviyesini koruyabilir; bu da navigasyon ile kafa karışıklığı arasındaki farkı yaratır.
Otonomi geliştikçe, IMU (Atalet Ölçüm Birimi) onun temelini oluşturmaya devam ediyor. Gelecekteki sistemler, atalet algılamayı yapay zeka destekli füzyon ve adaptif modelleme , ancak gerçek güvenilirlik yine de tek bir temel prensipten kaynaklanacak: hareket algılamanın kalitesi, navigasyonun güvenilirliğini belirler.
