Atalet Ölçüm Birimleri (IMU'lar), modern navigasyonun sessiz emektarlarıdır. Her hareketi, dönüşü ve ivmeyi algılayarak İHA'lara, gemilere, kara araçlarına ve uzay sistemlerine hayati veriler sağlarlar. Ancak, kritik rollerine rağmen, IMU'lar sıklıkla yanlış anlaşılır veya yanlış kullanılır. Entegrasyon aşamasındaki küçük hatalar, büyük operasyonel arızalara yol açabilir; bu da sapma, istikrarsızlık veya hatta görev kaybına neden olabilir. Gerçek şu ki, IMU'ların entegrasyonu sadece "tak ve çalıştır" meselesi değildir. Hassasiyet, disiplin ve öngörü gerektirir.
IMU entegrasyon hataları navigasyon güvenilirliğini ciddi şekilde etkileyebilir. Hizalama hatalarından ve titreşimlerden, yetersiz kalibrasyona ve sensör füzyonuna aşırı güvenmeye kadar, mühendisler sıklıkla aynı hataları tekrarlarlar. Bu kılavuzda, IMU entegrasyonunda en sık yapılan 10 hatayı inceliyor, sonuçlarını açıklıyor ve kendi projelerinizde uygulayabileceğiniz uzman çözümler sunuyoruz.
İçindekiler
Kurulum Sırasında Hizalama Hatası
Hata:
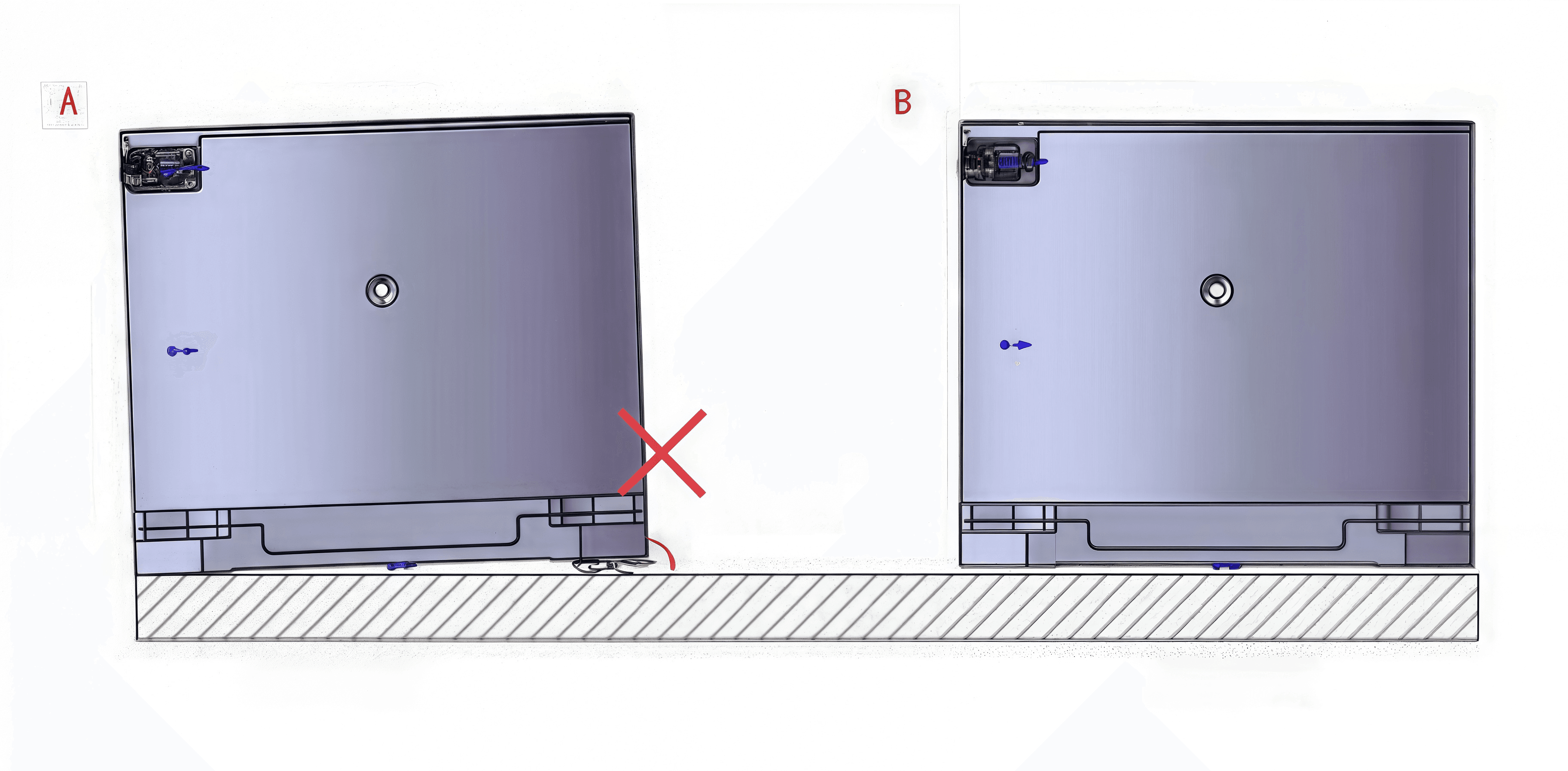
Mühendisler bazen IMU'ları hassas hizalama yapmadan platformun referans çerçevesine "yeterince yakın" bir şekilde monte ederler. Birkaç derecelik hata önemsiz gibi görünse de, navigasyonda bu sapmalar devasa hatalara dönüşür.
Darbe:
Eksenlerin yanlış hizalanması, yönelim ve hız tahminlerinde sistematik sapmaya neden olur. Uzun görevlerde, bu durum özellikle GPS'in devre dışı bırakıldığı ve IMU'nun tek doğru veri kaynağı olduğu operasyonlarda, artan sapmaya yol açar. Bir İHA yavaşça rotasından sapabilir veya bir robotik araç yönünü yanlış değerlendirebilir.
Düzeltmek:
CAD programında her zaman referans eksenlerini tanımlayın ve montaj sırasında lazer hizalama şablonları gibi hassas aletler kullanın. Montajdan sonra, küçük sapmaları ölçmek ve telafi etmek için bir hizalama kalibrasyonu gerçekleştirin.
💡Profesyonel İpucu: Mekanik toleranslara asla tek başına güvenmeyin; entegrasyon sonrası kalibrasyon sizin güvenlik ağınızdır.
Titreşim izolasyonunu göz ardı etmek
Hata:
IMU'yu, sensörün dahili filtrelerinin titreşimi telafi edeceği varsayımıyla, pervane kolları, motorlar veya araç şasisi gibi titreşimli yapılara doğrudan monte etmek.
Darbe:
Titreşim, ivmeölçer sinyallerini bozarak jiroskoplarda yanlış açısal hızlar oluşturur. Sonuç olarak, gürültülü çıktılar, kararsız navigasyon filtreleri ve stabilizasyon sistemlerinde gözle görülür titreme meydana gelir. Uçaklarda veya gimbal sistemlerinde titreşim, yönlendirme doğruluğunu bozabilir.
Düzeltmek:
Platformunuzun baskın frekanslarına göre ayarlanmış titreşim izolatörleri kullanın. Kalan etkileri azaltmak için donanım sönümlemesini dijital filtrelemeyle birleştirin. Performansı yalnızca laboratuvar ortamında değil, gerçek görev yükleri altında da doğrulayın.
💡Profesyonel İpucu: İzolasyon tasarımını kesinleştirmeden önce mutlaka platformunuzun titreşim spektrum analizini gerçekleştirin.
Termal Yönetimi Gözden Kaçırmak
Hata:
IMU'nun dahili sıcaklık dengeleme özelliğinin tüm termal sorunları çözdüğünü varsayarsak.
Darbe:
Gerçek görevler, elektronik aksamdan, motor egzozundan veya soğuk bekleme koşullarından kaynaklanan hızlı ısınmayı içerir. Bunlar, sapma kararsızlığına, ölçek faktörü kaymasına ve doğruluğun azalmasına neden olur. Uzayda, termal döngü hesaba katılmazsa felaketle sonuçlanabilir.
Düzeltmek:
Sistem seviyesinde termal kontrol tasarımı yapın. Seçenekler arasında yalıtımlı gövdeler, ısı dağıtıcılar veya hatta kontrollü ısıtıcılar yer almaktadır. Görev profili boyunca kararlılığı izlemek için yerleşik sıcaklık sensörlerini takip edin.
💡İpucu: IMU'ları yalnızca statik sıcaklık noktalarında değil, gerçekçi termal döngüler altında test edin.
Yanlış Performans Notunu Seçmek
Hata:
Bir IMU'yu yalnızca maliyet, boyut veya bulunabilirlik kriterlerine göre seçmek, görev süresini veya hassasiyet gereksinimlerini dikkate almamak.
Darbe:
Tüketici tipi MEMS'ler kısa testlerde kabul edilebilir görünebilir, ancak saatler süren veya GPS sinyalinin olmadığı senaryolarda kontrol edilemez sapmalar gösterebilir. Taktiksel MEMS veya FOG IMU'lar ciddi görevler için gereklidir, ancak ekipler genellikle bütçeyi kısmak için bunları kullanmaktan vazgeçer; bu da daha sonra maliyetli yeniden tasarımlara yol açar.
Düzeltmek:
IMU performansını (sapma kararsızlığı, rastgele yürüyüş, bant genişliği) görev ihtiyaçlarına göre ayarlayın. Hobi amaçlı dronlar için tüketici MEMS, İHA'lar ve savunma araçları için taktik MEMS ve denizcilik veya havacılık operasyonları için FOG'lar kullanın.
| IMU Tipi | Yaygın Yanlış Kullanım | Doğru Uygulama |
|---|---|---|
| Tüketici MEMS | Maliyetine göre seçildi | Kısa, kritik olmayan robotik |
| Taktiksel MEMS | Fiyatı göz ardı edildi | İHA'lar, İHA'lar, savunma platformları |
| SİS IMU | Aşırıya kaçmak olarak görülüyor | Denizcilik, havacılık ve uzay, GPS'siz operasyonlar |
💡Profesyonel İpucu: Görev başarısızlığının yaşam döngüsü maliyetini, sensörün başlangıç maliyetiyle her zaman karşılaştırın.
Kötü Kalibrasyon Stratejisi
Hata:
Yalnızca üreticinin kalibrasyonuna güvenmek ve bunun evrensel olarak geçerli olduğunu varsaymak.
Darbe:
Mekanik toleranslar, montaj hataları ve konektör gerilimleri, sisteme özgü sapmalara neden olur. İkinci bir kalibrasyon yapılmadığı takdirde, bu hatalar navigasyon performansını ve füzyon sonuçlarını olumsuz etkiler.
Düzeltmek:
Altı pozisyonlu testler veya hız tablosu karakterizasyonu gibi sistem düzeyinde kalibrasyon işlemleri gerçekleştirin. Kalibrasyon tablolarını aygıt yazılımında güncelleyin ve tutarlılık sağlamak için periyodik olarak tekrarlayın.
💡İpucu: Kalibrasyonu tek seferlik bir fabrika işlemi olarak değil, düzenli aralıklarla yapılan bir bakım adımı olarak düşünün.
Yetersiz Arayüz ve Veri İşleme
Hata:
Yanlış yapılandırılmış örnekleme hızları, gecikmenin göz ardı edilmesi veya verilerin diğer sensörlerle senkronize edilememesi.
Darbe:
Yüksek kaliteli IMU'lar bile, verileri geciktiğinde veya hizalanmadığında güvenilmez hale gelir. Zaman damgaları eşleşmediğinde LiDAR
Düzeltmek:
Sağlam veri işlem hatları tasarlayın. Her şeyin senkronize kalması için PPS veya donanım zaman damgalarını kullanın. Sensörden işlemciye uçtan uca gecikmeyi doğrulayın.
💡İpucu: Zaman senkronizasyonunu sonradan eklenen bir özellik olarak değil, sensör kalitesinin bir parçası olarak düşünün.
Manyetik ve EMI Girişimini Göz Ardı Etme
Hata:
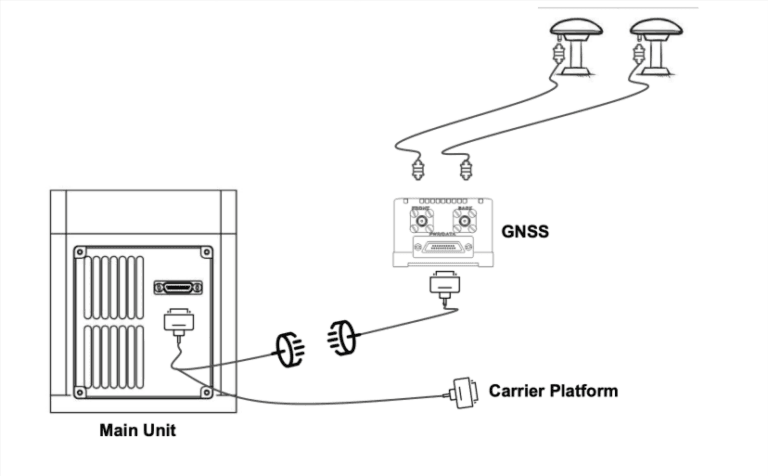
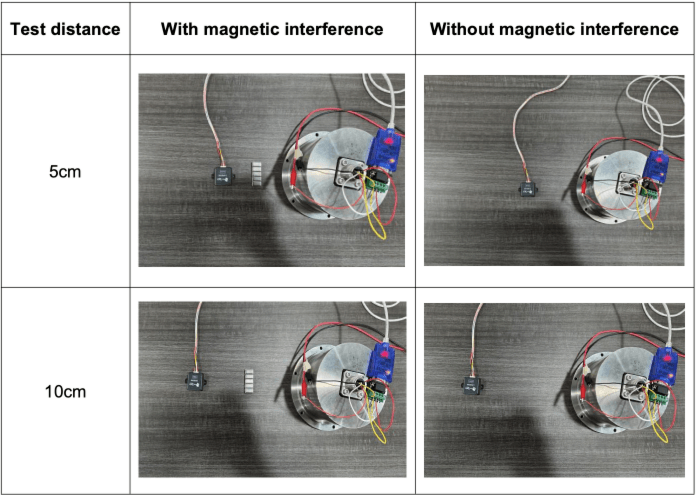
IMU'ları motorlara, yüksek akım kablolarına veya RF antenlerine yakın yerlere kurmak.
Darbe:
Manyetik alanlar ivmeölçer ve jiroskop sinyallerini bozar. EMI gürültüsü sensör elektroniğine karışarak hatalı çıkışlara neden olur. Bu durum özellikle kompakt tasarımların sensörleri motorlara tehlikeli derecede yaklaştırdığı İHA gimbal sistemlerinde yaygındır.
Düzeltmek:
IMU'ları EMI kaynaklarından uzak bir yere yerleştirin. Korumalı muhafazalar, bükümlü çift kablolama ve topraklama uygulamaları kullanın. Gizli parazitleri ortaya çıkarmak için tam elektrik yükü altında test edin.
💡İpucu: Temiz bir mekanik tasarım, karmaşık filtrelemeden daha etkili bir şekilde EMI sorunlarını çözebilir.
Uzun Vadeli Sapmayı Dikkate Almamak
Hata:
IMU'ların doğruluğunu kısa süreli testlerle teyit etmek ve saatler veya günler içindeki sapmaları göz ardı etmek.
Darbe:
Sapma kararsızlığı birikerek kilometrelerce konum hatasına neden olur. Yalnızca IMU'lara dayanan sistemler (denizaltılar, uzay araçları, GPS sinyali engellenmiş İHA'lar) kullanılamaz hale gelir.
Düzeltmek:
Görev sürelerini simüle eden dayanıklılık testleri gerçekleştirin. Uzun vadeli navigasyon istikrarı için taktiksel veya FOG IMU'ları tercih edin.
💡Profesyonel İpucu: Sapmayı her zaman sadece laboratuvarda 10 dakika üzerinden değil, 100 saatten fazla bir süre üzerinden değerlendirin.
Sensör Füzyonuna Aşırı Bağımlılık
Hata:
Kalman filtrelerinin veya yapay zeka tabanlı birleştirmenin zayıf IMU'ları düzeltebileceğini varsayarsak.
Darbe:
Yetersiz sensör girişleri filtreyi kirletir. Doğruluğu artırmak yerine, birleştirme hataları çoğaltır; "yanlış girerse, yanlış çıkar."
Düzeltmek:
Güvenilir IMU verileriyle başlayın. Füzyon, performansı artırmalı, arızalı sensörleri kurtarmamalıdır. Sinyalleri doğrulamak için mümkün olduğunca yedeklilik kullanın.
💡Profesyonel İpucu: İyi bir IMU, filtre karmaşıklığını azaltır ve sağlamlığı önemli ölçüde artırır.
Çevresel Yeterliliğin Hafife Alınması
Hata:
IMU'ları yalnızca laboratuvar koşullarında test etmek ve saha sonuçlarının da aynı olacağını varsaymak yanlıştır.
Darbe:
Nem, toz, darbe ve aşırı hava koşulları ticari özelliklerin ötesindedir. Uygun yeterlilik testinden geçirilmemiş IMU'lar kritik görevlerde başarısız olur.
Düzeltmek:
MIL-STD-810G, DO-160 veya eşdeğeri standartlara göre test edilmiş IMU'ları seçin. Sadece veri sayfası iddialarını değil, test verilerini de isteyin.
💡İpucu: Satıcılardan yeterlilik raporları isteyin; gerçek veriler pazarlama vaatlerinden daha önemlidir.
Çözüm
IMU entegrasyonu hem bir sanat hem de bir bilimdir. En gelişmiş algoritmalar veya kontrol sistemleri bile kötü kurulumu, hatalı kalibrasyonu veya yetersiz testleri telafi edemez. Burada açıklanan 10 hatadan kaçınarak, mühendisler IMU'ların gerçek potansiyelini ortaya çıkarabilir ve sahada hayatta kalacak ve gelişecek sistemler kurabilirler.
GuideNav olarak yüksek performanslı MEMS/Fiber Optik/Mini Fiber Optik jiroskoplar ve MEMS/Kuvars ivmeölçerlerden oluşan , tamamı titiz çevresel standartlara göre onaylanmış geniş bir IMU yelpazesi sunuyoruz. Ürünlerimiz, başarısızlığın kabul edilemez olduğu İHA'lar, denizcilik sistemleri, savunma araçları ve uzay platformları için tasarlanmıştır. Göreve hazır bir IMU'ya ihtiyacınız varsa, uzmanlarımız entegrasyon yolculuğunuzda size destek olmaya hazırdır.