IMU neden açıları doğrudan ölçemez?
INS'nin tahmini hesaplaması, GNSS sinyalleri başarısız olduğunda tarım robotlarının doğru yolda kalmasını sağlar. Kararlı jiroskop sapması, düşük kayma ve tekerlek odometrisi ve yerçekimi hizalaması kullanan sensör füzyonu sayesinde otonom traktörler, gölgelik altında, ahırların içinde veya metal yapıların yakınında bile sıra doğruluğunu koruyabilir.
Tarım Robotlarında GNSS Kesintilerinin Ele Alınması: INS Tahmin Stratejileri
INS'nin tahmini hesaplaması, GNSS sinyalleri başarısız olduğunda tarım robotlarının doğru yolda kalmasını sağlar. Kararlı jiroskop sapması, düşük kayma ve tekerlek odometrisi ve yerçekimi hizalaması kullanan sensör füzyonu sayesinde otonom traktörler, gölgelik altında, ahırların içinde veya metal yapıların yakınında bile sıra doğruluğunu koruyabilir.
IMU Jiroskop Sıcaklık Kayması Nasıl Ele Alınır?

IMU sıcaklık kayması, atalet sistemlerinde doğruluk bozulmasının önemli bir nedenidir. Donanım optimizasyonu, tam aralıklı termal kalibrasyon ve çevrimiçi telafi sayesinde mühendisler, kaymayı önemli ölçüde azaltabilir ve kararlı bir tutum performansı sağlayabilir.
Jiroskoplar ve İvmeölçerler IMU Performansını Nasıl Şekillendirir?

Kararlı bir IMU, jiroskop ve ivmeölçer verilerinin birleştirilmesine dayanır. Jiroskoplar kayar, ivmeölçerler gürültülüdür ve tamamlayıcı bir filtre, her ikisini de birleştirerek güvenilir, hafif ve gerçek zamanlı bir konum tahmini sunar.
Kuvars İvmeölçer ve MEMS İvmeölçer Karşılaştırması

Kuvars ivmeölçerler üstün uzun vadeli hassasiyet ve kararlılık sağlarken, MEMS ivmeölçerler kompakt, dayanıklı ve uygun maliyetli performans sunar. Doğru seçim, projenizin doğruluk gereksinimlerine, bütçenize ve çevresel koşullara bağlıdır.
Test Koşulları, IMU Spesifikasyonlarının Gerçek Anlamını Neden Belirler?
IMU test koşulları, IMU özelliklerinin ne kadar gerçekçi ve güvenilir olduğunu belirler. Sıcaklık, titreşim, süre ve filtreleme, veri sayfasının iddia ettiği ile sensörün gerçekte sunduğu sonuçları şekillendirir.
MEMS IMU'nun Boru Hattı İnceleme Robotlarında Uygulanması
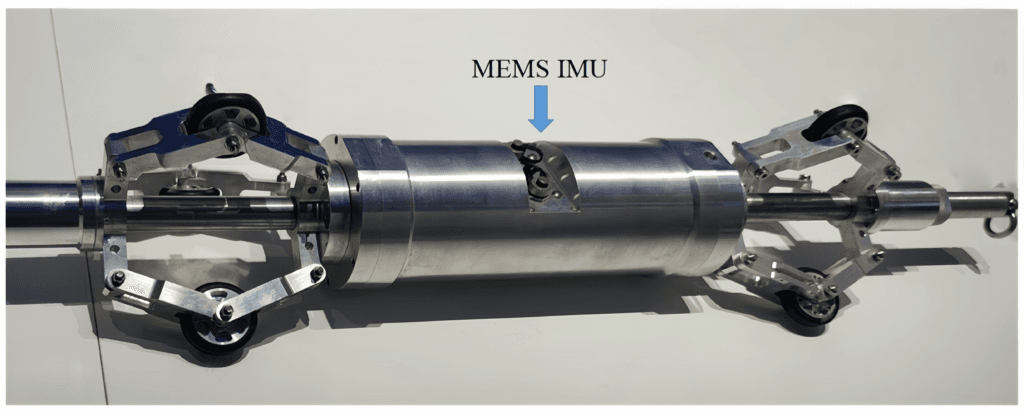
MEMS IMU'lar, GNSS sinyalinin bulunmadığı ortamlarda çalışan boru hattı inceleme robotları için hassas ataletsel navigasyon sağlar. İstikrarlı tutum, hız ve konum verileri sağlayarak, dar yeraltı veya denizaltı boru hatlarında güvenilir hata haritalaması, düzgün yörünge kontrolü ve sürekli çalışma sağlarlar.
Yüksek Hassasiyetli MEMS IMU'ların Kullanımındaki Gizli Tuzaklar: Her Entegratörün Bilmesi Gerekenler

Yüksek hassasiyetli MEMS IMU'lar, eşsiz hareket algılama performansı sunar; ancak bu performans yalnızca doğru kullanıldığında geçerlidir. Bu makale, doğruluk kaybına sıklıkla neden olan dört kritik kullanım hatasını ve bunların gerçek dünya entegrasyonunda nasıl önleneceğini ortaya koymaktadır.
Honeywell MEMS IMU HG1930'un Avantajları ve Dezavantajları
Honeywell HG1930, insansız hava araçları, robotik ve savunma sistemleri için güvenilir performans ve sağlam tasarım sunan kompakt, taktik sınıf bir MEMS IMU'dur. Zorlu ortamlarda istikrarlı doğruluk sağlar, ancak daha yüksek maliyet ve ihracat kısıtlamalarıyla birlikte gelir.
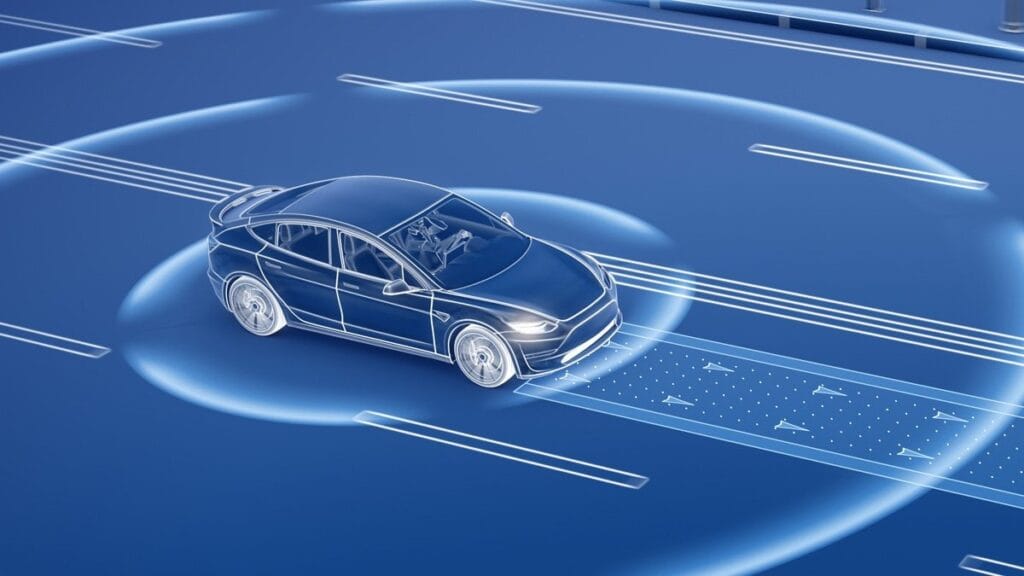
Otonom Sürüşün Arkasındaki INS Tabanlı Konum Belirleme Teknolojisinin İç Yüzü
Otonom araçlar, GNSS/INS entegrasyonu, LiDAR haritalama ve görsel algılama yoluyla santimetre düzeyinde doğruluk elde ederken, GPS sinyallerinin kesilmesi durumunda yüksek hassasiyetli IMU'lar konum belirlemenin temelini oluşturur.