Bir navigasyon sistemini entegre etmeyi denediniz mi, ancak sistemin konum bilgisi vermediğini fark ettiniz mi?
Bu durum, insanların IMU ile INS'yi karıştırmasıyla ortaya çıkar. Teknik gibi görünse de sonuçları gerçektir: yanlış donanım seçimleri, boşa harcanan bütçe ve beklendiği gibi çalışmayan sistemler. Çözüm mü? IMU ve INS arasındaki temel farkları ve her birinin aslında ne için tasarlandığını anlamak. Bu kılavuz, her şeyi anlaşılır bir dille size anlatacak.
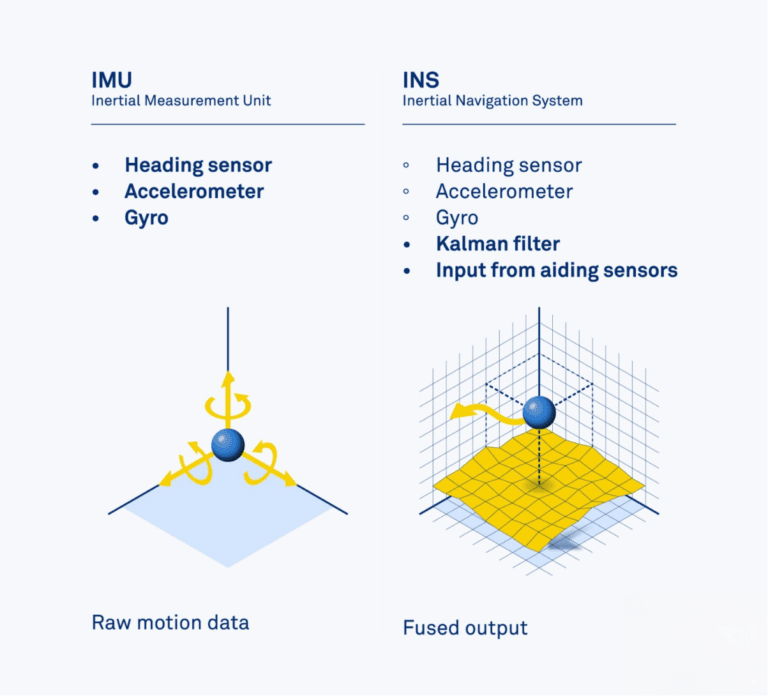
IMU hareketi ölçerken, INS ise zaman içinde konum ve yönelim hesaplamak için IMU verilerini kullanır; IMU bir sensör, INS ise bir sistemdir.
Gelin, kafa karışıklığını adım adım giderelim.
İçindekiler

IMU nedir?
Atalet Ölçüm Birimi (IMU), ivmeyi ve açısal hızı ölçen bir sensör cihazıdır . Genellikle MEMS, FOG veya HRG teknolojileriyle üretilen bir IMU, ivmeölçerler, jiroskoplar ve bazen de manyetometreler . Uzaydaki hareketi tahmin etmek için kullanılan ham atalet verilerini üretir. IMU'lar İHA'larda, robotikte, araçlarda ve akıllı telefonlarda yaygın olarak kullanılır. Bununla birlikte, ek işlemeyle entegre edilmedikçe, kendi başlarına konum veya yönelim bilgisi sağlamazlar . IMU'lar, düşük maliyetli ticari sınıf sensörlerden GuideNav'ın GMS400'ü gibi taktik ve navigasyon sınıfı sensörlere kadar hassasiyet açısından farklılık gösterir.

INS nedir?
Ataletli Navigasyon Sistemi (INS) gerçek zamanlı olarak konum, hız ve yönelim hesaplayan eksiksiz bir sistemdir
- Gömülü bir IMU
- güçlü bir dahili işlemci
- Sensör füzyon algoritmaları (örneğin, Kalman Filtresi )
- Genellikle, yardımcı amaçlı bir GNSS modülü kullanılır
INS, sürekli bir navigasyon çözümü sağlamak için IMU çıktılarının gerçek zamanlı entegrasyonunu gerçekleştirir. Bu nedenle, GNSS'nin bulunmadığı ortamlarda bile sınırlı bir süre çalışabilir ve bu da onu havacılık, denizcilik ve otonom görevlerde . GuideNav'ın GFS120 ve GUIDE2D gibi sistemleri bu tür entegrasyona örnek teşkil eder.
IMU'lar ve INS'ler Arasındaki Fark Nedir?
Çoğu insan bunu şöyle basitleştiriyor: "INS, GNSS modülüne sahip bir IMU'dan başka bir şey değildir." Teknik olarak bu bir başlangıç ancak resmin tamamından çok uzak.
Evet, bir INS'nin temelinde bir IMU bulunur. Ancak aynı zamanda bir işlemci, GNSS (genellikle RTK veya SBAS desteğiyle) ve bazen tekerlek kodlayıcıları, hava hızı sensörleri, barometrik altimetreler veya Doppler Hız Kayıtları (DVL) . Bu eklemeler, INS'nin verileri gerçek zamanlı olarak birleştirmesine ve yalnızca hareketi değil, aynı zamanda konum, hız ve yönelim konusunda yüksek güvenilirlikte tahminler sunmasına olanak tanır.
IMU'yu bir termometre gibi düşünün; size ham verileri verir. INS ise hava durumu raporudur: filtrelenmiş, birleştirilmiş ve harekete geçmeye hazır.
| Özellik | IMU | INS |
|---|---|---|
| Temel İşlev | İvme ve dönüşü ölçer | Konumu, hızı ve yönü tam olarak hesaplar |
| Bileşenler | İvmeölçer, Jiroskop | IMU + GNSS + İşlemci + İsteğe bağlı sensörler |
| Çıktı | Ham hareket verileri | Birleştirilmiş navigasyon verileri (gerçek zamanlı) |
| GNSS Desteği | Hiçbiri | Dahili (RTK/SBAS isteğe bağlı) |
| Dış Yardım | Uygulanamaz | Kilometre sayacı, DVL, hava hızı, altimetre vb. |
Sadece IMU ile navigasyon yapabilir misiniz?
IMU'yu, gözleriniz kapalıyken hareketi hissetmek gibi düşünün. İleri gittiğinizi veya döndüğünüzü anlayabilirsiniz, ancak nerede olduğunuz hakkında hiçbir fikriniz olmaz. Sadece IMU kullanarak yön bulmaya çalıştığınızda olan da budur.
Elbette, konum tahmini için ivmeyi zamana entegre edebilirsiniz. Ancak küçük hatalar hızla birikerek saniyeler içinde büyük hatalara dönüşür. Buna sapma denir ve bu durum, bağımsız IMU'ları navigasyon için güvenilmez hale getirir.
Bunlar kısa vadeli dengeleme için harikadır (örneğin gimbal'i düz tutmak gibi), ancak nerede olduğunuzu veya nereye gittiğinizi anlamak için uygun değildir. Bunun için bir INS'ye ihtiyacınız var.
INS, IMU verilerini nasıl işler?
Sadece hareketi algılayan bir IMU'nun aksine, bir INS bu hareketi yorumlar ve tam navigasyon bilgisine dönüştürür. Bu, nerede olduğunuzu, ne kadar hızlı hareket ettiğinizi ve hangi yöne baktığınızı bilmeyi içerir. Ancak bu otomatik olarak gerçekleşmez. Ham sinyalleri güvenilir navigasyona dönüştürmek için fizik, matematik ve gerçek zamanlı düzeltmeyi birleştiren dikkatlice tasarlanmış bir dizi adım gerektirir.
Şimdi süreci adım adım inceleyelim:
1. Hareket Algılama (IMU Girişi)
Her şey, ivmeyi (ivmeölçerler aracılığıyla) ve açısal hızı (jiroskoplar aracılığıyla) sürekli olarak ölçen IMU ile başlar. Bu değerler, sistemin 3 boyutlu uzayda nasıl hareket ettiğini yansıtır.
➡ Bu adım, INS'ye ham hareket algılama özelliğini kazandırır.
2. Hızı ve Konumu Hesaplayın
INS, ivmeyi entegre ederek hızı elde eder, ardından hızı entegre ederek zaman içindeki konumu tahmin eder. Bu, sisteme başlangıç noktasından ne kadar uzaklaştığını gösterir.
➡ INS, GPS olmadan bile hareketleri bu şekilde takip eder.
3. Yön Tahmini
INS, jiroskop verilerini işleyerek ve yerçekimi ve Dünya'nın manyetik alanı gibi vektörleri referans alarak, yuvarlanma, eğim ve sapma açılarını, yani tam 3 boyutlu yönelimini belirler.
➡ Bu adım, sistemin nasıl döndürüldüğünü veya eğildiğini anlamasına yardımcı olur.
4. Doğruluk için Sensör Füzyonu Uygulayın
Yalnızca IMU verileri zamanla sapma gösterir. INS, IMU girdilerini diğer sensörlerle birleştirmek için Kalman Filtreleri gibi akıllı algoritmalar kullanır:
- GNSS / RTK / SBAS
- Tekerlek kilometre sayacı
- DVL veya hava hızı sensörleri
- Barometrik altimetreler
Bu düzeltmeler, doğruluğu ve uzun vadeli istikrarı önemli ölçüde artırır.
➡ Fusion, bazı sensörlerin sinyalini kaybetmesi durumunda bile sistemin güvenilirliğini korur.
5. Gerçek Zamanlı Navigasyon Çıktısı Sağlayın
Son çıktı, konum, hız ve yönelim verilerinin sürekli, gerçek zamanlı bir akışıdır; saniyede birçok kez güncellenir ve uçuş kontrolörleri, otomatik pilotlar veya haritalama sistemleri tarafından kullanılmaya hazırdır.
➡ Bu, INS'yi eksiksiz bir navigasyon çözümü haline getiriyor.
GuideNav'ın INS ürünleri bu mimariyi takip eder; GNSS sinyalinin olmadığı koşullar, dinamik ortamlar ve yüksek titreşimli platformlar için optimize edilmiş füzyon motorlarına sahiptir. Sonuç: En çok ihtiyaç duyduğunuz anda güvenebileceğiniz güvenilir bir navigasyon.
Bir Uygulama İçin IMU Ne Zaman Yeterli Olur?
hareketi algılaması gerekiyorsa, bir IMU (Atalet Ölçüm Birimi) yeterlidir . Mutlak konumu takip etmeye çalışmak yerine harekete tepki verdiğiniz durumlarda idealdir.
Yaygın kullanım örnekleri şunlardır:
Kamera sabitleme
Titreşimi veya eğimi algılayarak motorların kamerayı sabit tutmasına yardımcı olur.
Hareket takibi
Artırılmış gerçeklik/sanal gerçeklik veya giyilebilir cihazlarda, tam konumu değil, hareketi takip edersiniz.
Kısa vadeli oryantasyon
İnsansız hava araçlarında veya robotlarda kalkış, havada sabit kalma veya hızlı manevralar sırasında kullanılır.
Uçuş kontrol desteği
GNSS veya optik akışla birlikte kullanılan IMU'lar, drone stabilizasyonu için hızlı geri bildirim sağlar.
Şunu aklınızda bulundurun: IMU'lar yalnızca ham ivme ve dönüş verilerini verir. Yön veya hız verilerine ihtiyacınız varsa, hesaplamaları kendiniz yapmanız gerekecek; filtreler, sapma düzeltmesi ve daha fazlası.
Eğer sisteminizin kapasitesi dahilindeyse, IMU hafif, uygun fiyatlı ve verimli çözümdür.
Tam kapsamlı bir sigorta poliçesine gerçekten ne zaman ihtiyacınız olur?
Sisteminizin her zaman tam konum ve yönelim , özellikle GNSS'nin arızalanabileceği veya kullanılamayacağı ortamlarda, tam bir INS'ye ihtiyacınız vardır.
Tipik kullanım örnekleri şunlardır:
- GNSS sinyalinin olmadığı ortamlar: tüneller, kapalı alanlar, su altı veya kentsel kanyonlar gibi.
- Yüksek dinamik aralıklı platformlar: insansız hava araçları, füzeler ve arazi araçları gibi hızlı ve doğru güncellemelere ihtiyaç duyan platformlar.
- Ölü hesaplama: Sistemin GNSS sinyalleri arasında veya GNSS olmadan navigasyonu sürdürmesi gereken durum.
- Hassasiyet gerektiren görevler: haritalama, hedefleme veya otonom sürüş gibi.
Bu durumlarda, tek başına bir IMU hızla sapmaya uğrayarak güvenilmez sonuçlara yol açar. Bir INS, atalet verilerini GNSS ve DVL, kilometre sayacı veya altimetre gibi isteğe bağlı sensörlerle birleştirerek bu sorunu çözer.
IMU veya INS Seçiminde Yapılan Yaygın Hatalar Nelerdir?
Dürüst olalım, atalet sensörleri söz konusu olduğunda, özellikle bu alanda yeniyseniz, yanlış karar vermek çok kolay. Ekiplerin yanlış aleti seçtiğini sayamayacağım kadar çok kez gördüm. Ve bu nadiren teknolojiyle ilgili oluyor; genellikle sorunun yanlış anlaşılmasıyla ilgili.

İşlerin genellikle rayından çıktığı yer burasıdır:
1. Hata: IMU'nun size konum bilgisi verdiğini düşünmek
Hayır, öyle değil. Bir IMU size yalnızca ne kadar hızlı hareket ettiğinizi veya döndüğünüzü söyler. Kutudan çıkar çıkmaz gerçek zamanlı koordinatlar bekliyorsanız, hayal kırıklığına uğrayacaksınız.
Hata #2: Zorlu bir iş için giriş seviyesi bir IMU kullanmak
Düşük maliyetli bir sensör kağıt üzerinde iyi görünebilir, ancak onu hızlı hareket eden bir drone veya robota taktığınızda, gürültü ve sapma verilerinizi mahvedecektir.
3. Hata: IMU yeterli olacakken INS için para ödemek
Eğer ihtiyacınız olan tek şey kamerayı sabitlemek veya temel yönelim tespiti yapmaksa, tam teşekküllü bir INS sistemi gereksizdir. 300 dolarlık bir sorunu 3000 dolarlık bir çözümle çözmeye çalışmayın.
4. Hata: Gerçek dünya ortamını unutmak
Laboratuvar özellikleri her zaman saha performansını yansıtmaz. Yüksek titreşim, aşırı sıcaklıklar veya şok yükler, ucuz sensörlerin performansını hızla düşürebilir.
5. Hata: Entegrasyon çabasını hafife almak
Ham IMU verileri tak ve çalıştır şeklinde değildir. Doğru yazılım, filtreler veya algoritmalar mevcut değilse, en iyi sensör bile beklentilerin altında performans gösterecektir.
GuideNav, IMU/INS seçimi için ne tür destekler sunuyor?
GuideNav'da sadece sensör göndermiyoruz, doğru sistemi kurmanıza da . Sunduğumuz hizmetler şunlardır:
- Birebir başvuru danışmanlığı
- IMU/INS performans eşleştirmesi
- İHA'lar, İHA'lar ve denizcilik sistemleri için entegrasyon kılavuzları
- Veri sayfası erişim ve değerlendirme kitleri
- Hızlı müdahale mühendislik desteği
İster düşük güç tüketimli bir İHA, ister GNSS sinyalinin olmadığı bir navigasyon sistemi kuruyor olun, görev profilinize göre MEMS IMU, FOG IMU veya komple INS sistemleri