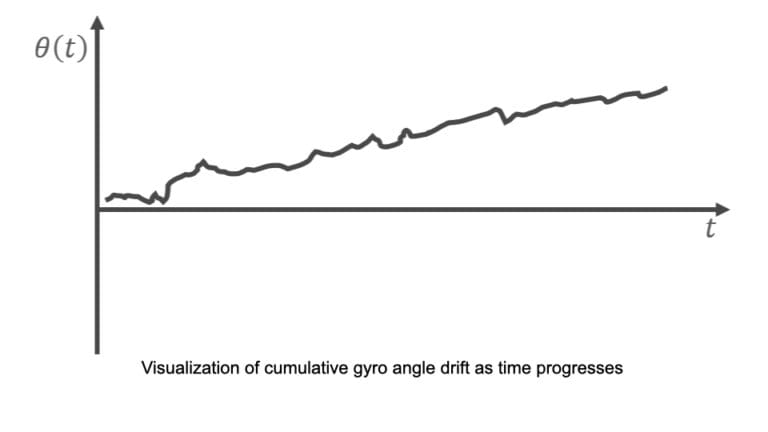
Saha operasyonları için atalet sistemleri tasarlama deneyimimde, mühendislerin sıklıkla gözden kaçırdığı, aldatıcı derecede basit bir sayı var: Açısal Rastgele Yürüyüş (Aangle Random Walk). Bu, sapma kararlılığı veya bant genişliği kadar gösterişli değil, ancak özellikle GNSS bağlantısı kesildiğinde, sisteminizin ne kadar süreyle güvenilir kalabileceğinin gerçek dünyadaki sınırını tanımlar. ARW, kalibrasyonla giderilebilecek bir hata değildir. Saniye saniye büyüyen bir gürültüdür. Nasıl çalıştığını anladığınızda, tezgahınızdaki her IMU'yu değerlendirme şeklinizi değiştirir.
ARW bir teknik özellik değil, bir saattir. IMU çalışmaya başladığı andan itibaren, yönelim güveninin ne kadar hızlı azaldığını size söyler. Bu değer ne kadar düşükse, sisteminiz o kadar uzun süre doğru konumda kalır.
Yıllar içinde, ekiplerin IMU'ları sapma özelliklerine ve bant genişliği tablolarına göre seçtiğini, ancak simülasyonu imkansız kılan sapmalarla karşılaştığını gördüm. Bu sapma genellikle gözden kaçırdıkları şeyden değil, yeterince önem vermedikleri bir şeyden kaynaklanıyor: ARW (Aktif Dalgalanma Oranı). ARW'nin gürültü ufkunuzu tanımladığını fark ettiğinizde, veri sayfalarını farklı şekilde okumaya başlıyorsunuz. "Hassasiyet nedir?" diye sormayı bırakıp, "Belirsizlik devreye girmeden önce bu şeye ne kadar süre güvenebilirim?" diye sormaya başlıyorsunuz
İçindekiler
Açısal Rastgele Yürüyüş (ARW) Tam Olarak Nedir?
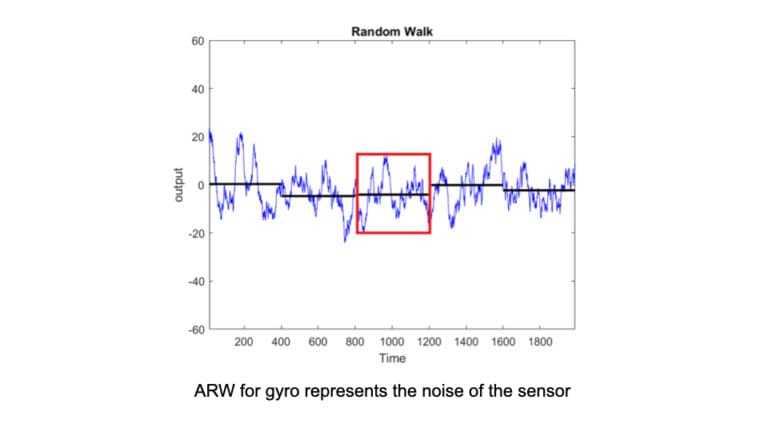
Basitçe ifade etmek gerekirse, Açısal Rastgele Yürüyüş (ARW) , açısal hızı entegre etmeye başladığınız anda jiroskopunuzun biriktirdiği gürültüdür. Ancak şunu açıkça belirtelim: Bu, ölçüm hatası veya sapma kayması değildir. jiroskopun sinyal yolundaki beyaz gürültüden kaynaklanan belirsizliğin zamanın kareköküyle artmasıdır Bunu kalibre edemezsiniz ve stabilize olmasını bekleyemezsiniz ; her zaman oradadır, arka planda tıkır tıkır işler.
yönelim tahmininizin "temel bulanıklığı" olarak tanımlarım . Platformunuzun hareket halinde olup olmaması önemli değildir. Laboratuvarda bile , masaya sabitlenmiş kaya gibi sağlam bir sensörle bile ARW hesaplanır. Bu da onu bu kadar temel kılan şeydir. Bu bir performans hatası değil, fiziktir.
ARW pratikte nasıl ölçülür?
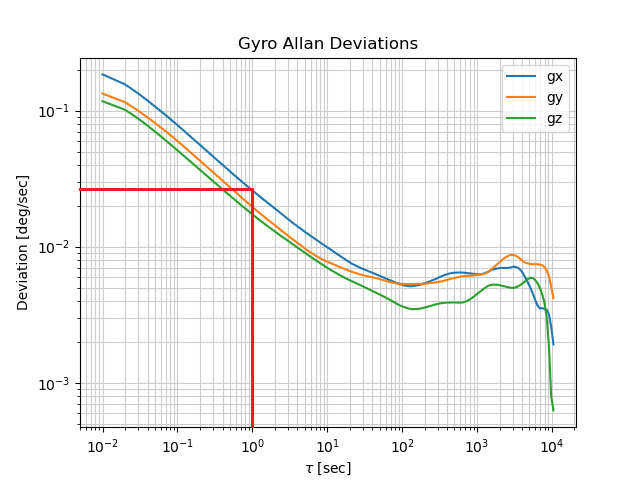
ARW'yi ölçmek için altın standart, Allan varyans analizidir.
Bu teknik, farklı gürültü türlerini değişen zaman aralıklarında ayrıştırır. Kısa ortalama sürelerinde, ARW, log-log Allan sapma grafiğinde karakteristik bir -½ eğim olarak kendini gösterir. Bu, jiroskopunuzun çıktısındaki beyaz gürültünün imzasıdır ve yönelim doğruluğunuz için alt sınırı belirler.
Ama sadece teknik özellik sayfasına güvenemezsiniz.
Çalışma sürecimde, her zaman mekanik olarak izole edilmiş bir platformda kontrollü statik testler yapıyorum, ham jiroskop verilerini kaydediyorum ve kendi Allan grafiklerimi oluşturuyorum. Temiz bir kısa süreli eğim, jiroskopun kararlı olduğunu gösteriyor. Eğim gürültülü veya düzensiz ise, "0,05°/√h" olarak belirtilen değerin sahada geçerli olmayabileceğini biliyorum.
ARW sadece bir sayı değil, gerçek verilerde görmeniz gereken bir örüntüdür.
Bu yüzden ARW'yi sadece alıntı yapılacak bir şey olarak değil, doğrulanacak bir şey olarak ele alıyorum. Allan varyansınız spesifikasyonla uyuşmuyorsa, tüm füzyon yığınınız daha sonra olumsuz sonuçlarla karşılaşabilir.
ARW, IMU Doğruluğu İçin Neden Kritik Öneme Sahiptir?
Hiç Uyumayan Gürültü
Önyargı veya ölçek faktörü gibi deterministik hataların aksine, ) yönelim tahmininize sürekli olarak belirsizlik katar Jiroskoplar açısal hızı ölçtüğü ve bu hızlar zaman içinde entegre , küçük rastgele dalgalanmalar bile önemli açısal sapmalara yol açar. Etkisini hissetmek için dakikalara veya saatlere ihtiyacınız yok; yüksek hassasiyetli platformlarda, ARW saniyeler içinde doğruluğu düşürmeye başlar .
Seyirde Görünmez Tavan
, harici düzeltmeler (GNSS veya manyetometreler gibi) mevcut olmadığında IMU'nuzun ne kadar süreyle güvenilir yönlendirme sağlayabileceğine dair bir sınır altta yatan jiroskopun görev süresi için çok yüksek bir ARW'ye sahip olması . Bu bir yazılım sorunu değil, fiziksel bir kısıtlamadır. Tasarladığım her atalet sisteminde, ARW'yi bildiğimde, navigasyonun ne zaman başarısız olacağını tahmin edebiliyorum. Ve bu çok güçlü bir özellik.
ARW ile Bias Kararsızlığı Arasındaki Fark Nedir?
| Açısal Rastgele Yürüyüş (ARW) | Önyargı Kararsızlığı |
|---|---|
| Kısa süreli gürültü. Jiroskop çıktısında anında küçük rastgele dalgalanmalar olarak görünür. | Orta ve uzun vadeli sapma. Sıfır faiz oranı seviyesinin zaman içinde yavaşça yer değiştirmesi. |
| √Zamanla artar. Yönelim hatasının sürekli birikmesine neden olur. | Allan varyans grafiklerinde düz bir plato oluşturur |
| Öngörülemez ama sınırlıdır. İstatistiksel olarak modellenebilir, ancak ortadan kaldırılamaz. | Yavaşça değişen. Genellikle filtrelerle modellenir ve kısmen telafi edilir. |
| Kısa süreli doğruluk konusunda üstün performans gösterir. Özellikle hızlı hareket eden, yüksek dinamik sistemlerde kritik öneme sahiptir. | Uzun vadeli hassasiyete hakimdir. Haritalama düzeyinde INS veya uzun süreli navigasyon gibi uygulamalarda önemlidir. |
Bu karışıklığın sebebi ne?
Çünkü hem ARW hem de sapma kararsızlığı sapmaya neden olur, ancak farklı şekillerde ve farklı zaman ölçeklerinde. Atalet sistemlerine yeni başlayan mühendisler genellikle bunları birbirine karıştırarak özellikle GNSS olmadan çalışma süresinin saatler değil dakikalarla ölçüldüğü taktik görevlerde performansı sınırlayan genellikle ARW'dir
Farklı IMU'lar için Tipik ARW Değerleri Nelerdir?
Gerçek projelerde nadiren "en iyi IMU bunun yerine "bu boyut, ağırlık ve bütçe dahilinde alabileceğim en düşük ARW değeri nedir?" diye sorarım. ARW, bir sensörün tüketici sınıfı, taktiksel sınıf veya stratejik sınıf olup olmadığını sessizce gösteren bir özelliktir.
ARW'nin sensör sınıflarına göre dağılımını şu şekilde gözlemledim:
| IMU Sınıfı | Tipik ARW (°/√h) | Ait Olduğu Yer |
|---|---|---|
| Tüketici MEMS | 1 – 10 | Telefonlar, giyilebilir cihazlar, giriş seviyesi robotik |
| Endüstriyel MEMS | 0.1 – 1 | GNSS sistemli dronlar, hafif otonom platformlar |
| Taktiksel MEMS | 0.05 – 0.1 | Savunma amaçlı insansız hava araçları, silah stabilizasyonu, araçlar |
| Seyir sınıfı sis | 0.001 – 0.01 | Denizcilik, havacılık, demiryolu, uzun menzilli İHA'lar |
| Stratejik RLG | < 0.001 | Denizaltılar, kıtalararası balistik füzeler, yüksek güvenlikli askeri sistemler |
ARW'yi tasarım kararlarında bir eleme filtresi gibi kullanıyorum.
Sistemimin GNSS olmadan 30 dakika boyunca çalışması ve 1° yön doğruluğunu koruması gerekiyorsa, 0,2°/√h'lik MEMS üniteleri kesinlikle yeterli olmayacaktır. Taktiksel MEMS üniteleri belki zar zor başarabilir. Bundan daha yüksek bir performansa ihtiyacım varsa, ya FOG ya da hiçbir şey.
Sırada Ne Var?
Artık ARW'nin ne olduğunu, nasıl ölçüldüğünü ve neden önemli olduğunu net bir şekilde anlamış olmalısınız. Ancak teori, denklemin sadece yarısıdır. Bu serinin ikinci bölümünde, ARW'nin gerçek sistemlerde nasıl ortaya çıktığını –İHA sürüklenmesinden sadece ataletle çalışan görevlere kadar– ve bizim gibi mühendislerin bunu nasıl dikkate alarak tasarım yaptığını ele alacağım. Taktiksel konulara da değineceğiz: yazılım sınırlamaları, mekanik izolasyon, füzyon stratejileri ve kritik uygulamalar için katı ARW eşikleri.
→ 2. Bölüme Devam Edin: ARW'yi Göz Önünde Bulundurarak Tasarım
