Navigasyon sistemleri geliştirme çalışmalarımda, gerçek güvenilirliğin harici sinyallere bağımlılıktan değil, bağımsızlıktan kaynaklandığını keşfettim. Bu nedenle Ataletli Navigasyon Sistemleri (INS) çok önemli bir rol oynuyor: Tamamen dahili ölçümlerle çalışarak, otonom araçlardan uzay platformlarına kadar geniş bir yelpazedeki ortamlarda tutarlı ve sürekli navigasyon sağlıyorlar.
Ataletsel Navigasyon Sistemi (INS), konum, hız ve yönü yalnızca dahili hareket sensörlerini kullanarak belirler ve otonom sistemler, su altı platformları ve görev açısından kritik savunma operasyonları da dahil olmak üzere çok çeşitli uygulamalarda hassas navigasyon sağlar.
Başvurunuz için bir INS seçmeden önce, çalışma prensipleri ve sistem türleri hakkında net bir anlayışa sahip olmak faydalı olacaktır.
İçindekiler

Ataletli Seyir Sistemi (INS) Nedir?
Ataletli Navigasyon Sistemi (INS), genellikle ivmeölçerler ve jiroskoplar gibi dahili hareket sensörlerini kullanarak bir platformun üç boyutlu uzaydaki konumunu, hızını ve yönünü sürekli olarak hesaplayan, kendi kendine yeten bir sistemdir. Herhangi bir harici referansa dayanmadığı için INS, su altı, yer altı ve yüksek dinamik savunma uygulamaları da dahil olmak üzere tutarlı ve kesintisiz navigasyonun gerekli olduğu ortamlarda özellikle değerlidir.
Bir INS'nin Temel Bileşenleri Nelerdir?
INS çözümleri tasarlama deneyimime göre, her sistem üç temel bileşenle başlar: jiroskoplar, ivmeölçerler ve bir navigasyon işlemcisi. Doğruluğu ve kararlılığı artırmak için, gelişmiş sensör füzyonu için genellikle GNSS alıcıları, manyetometreler veya barometrik altimetreler gibi ek sensörler entegre ederiz. Bu mimari, INS'nin çeşitli ve zorlu ortamlarda güvenilir hareket takibini sürdürmesini sağlar.

Jiroskoplar
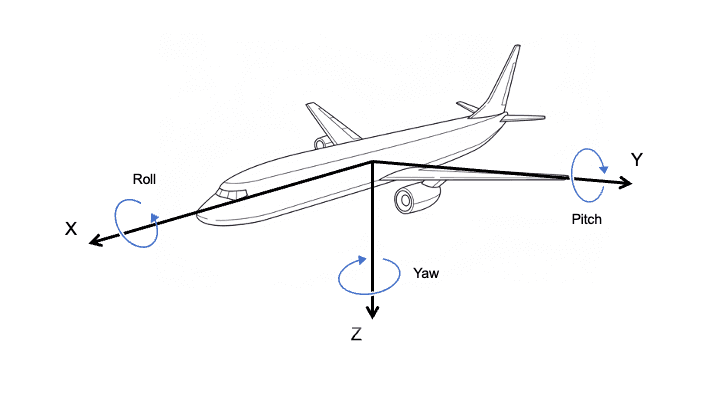
Jiroskoplar, üç dik eksen (X, Y, Z) boyunca açısal hızı ölçerek, yönelim hesaplamaları için gerekli verileri sağlar: yuvarlanma, eğim ve sapma. MEMS jiroskoplar kompakt uygulamalar için yaygın olarak kullanılırken, FOG (Fiber Optik Jiroskoplar) ve RLG (Halka Lazer Jiroskoplar) taktik ve havacılık sınıfı sistemler için daha yüksek hassasiyet ve uzun vadeli kararlılık sunar.
İvmeölçerler
İvmeölçerler, her eksen boyunca doğrusal ivmeyi ölçer. Bu değerler zaman içinde entegre edildiğinde, hız ve yer değiştirmedeki değişiklikleri verir. Zaman içinde konum doğruluğunu korumak için düşük sapma kararsızlığına ve düşük gürültüye sahip yüksek performanslı ivmeölçerler çok önemlidir.
Ataletsel Navigasyon İşlemcisi
İşlemci, INS'nin hesaplama çekirdeği olarak görev yapar. Hareket sensörlerinden gelen girdileri birleştirir, telafi algoritmaları ve filtreleme uygular ve gerçek zamanlı olarak konum, hız ve yönelim bilgilerini verir. Birçok sistem ayrıca bu ünite içinde harici sensör entegrasyonunu ve gerçek zamanlı teşhisi de destekler.
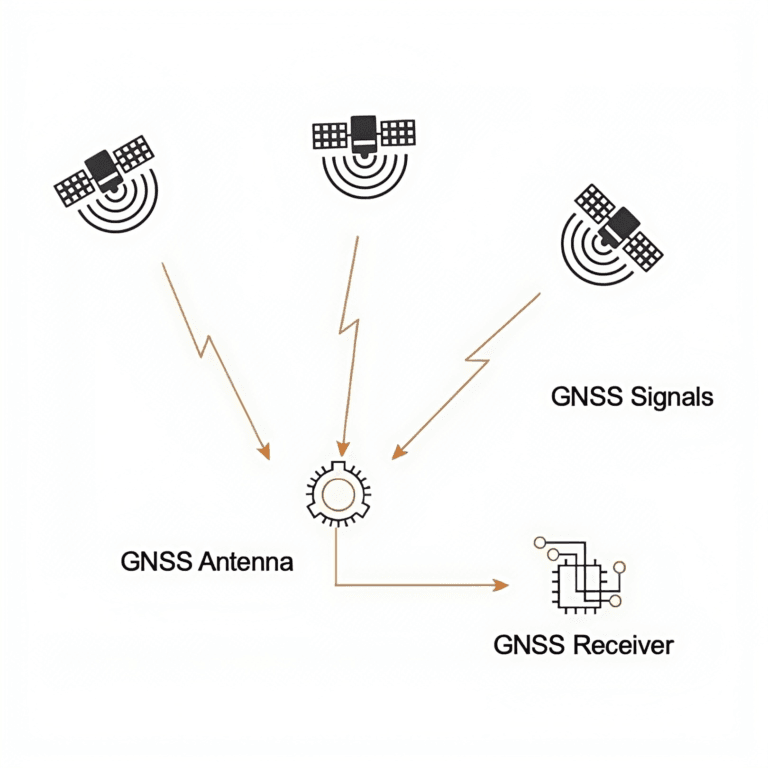
GNSS Alıcıları
Günümüzde giderek artan sayıda INS çözümü, GNSS alıcılarını . Atalet ölçümlerini uydu verileriyle (genellikle genişletilmiş Kalman filtrelemesi yoluyla) birleştirerek, bu hibrit sistemler sapmayı etkili bir şekilde düzeltir ve otonom platformlarda, havacılık sistemlerinde ve jeodezik uygulamalarda sağlam navigasyon performansı sunar.
Manyetometreler
Manyetometreler, Dünya'nın manyetik alanını ölçerek yön belirlemeye yardımcı olur. Jiroskopik çözümlere göre daha az doğru olsalar da, özellikle düşük dinamik aralıklı veya iç mekan uygulamalarında kullanışlı bir mutlak referans sağlarlar.
Barometrik Altimetreler
Bu sensörler, atmosfer basıncına bağlı olarak yükseklik tahmini sağlar. Genellikle GNSS yükseklik verilerinin güvenilir olmayabileceği ortamlarda dikey referans verilerine ihtiyaç duyan İHA'larda, uçaklarda ve yer sistemlerinde kullanılırlar.
Bu bileşenler bir araya gelerek, ister tek başına atalet tabanlı bir ünite olarak ister karmaşık ve dinamik ortamlar için tasarlanmış, sıkıca entegre edilmiş bir GNSS/INS çözümünün parçası olarak çalışsın, yüksek hızlı, gerçek zamanlı hareket verileri sağlayabilen çok yönlü bir navigasyon sistemi oluşturur.
INS'nin Farklı Türleri Nelerdir: MEMS, FOG ve RLG?
Ataletsel Navigasyon Sistemleri, jiroskop teknolojisi türüne göre genel olarak sınıflandırılabilir . Teknoloji seçimi, sapma kararlılığı, gürültü, kayma ve maliyet gibi temel performans özelliklerini belirler; bu nedenle uygulamanız için doğru türü seçmek çok önemlidir.
1. MEMS Sistemleri (Mikro-Elektro-Mekanik Sistemler)
MEMS INS, silikon tabanlı mikromekanik jiroskoplar ve ivmeölçerler kullanılarak üretilir. Yarı iletken üretimindeki gelişmeler sayesinde, bu sistemler artık boyut, ağırlık, güç ve maliyetin (SWaP-C) önemli kısıtlamalar olduğu kompakt platformlarda yaygın olarak kullanılmaktadır.



2. FOG INS (Fiber Optik Jiroskop Tabanlı INS)
FOG INS, dönüşü ölçmek için sarmal fiber optik kullanan Sagnac etkisine dayanmaktadır. MEMS sistemlerine kıyasla önemli ölçüde daha yüksek kararlılık, daha düşük sapma ve daha iyi ölçek faktörü doğrusallığı sunarak taktiksel düzeyde navigasyon için idealdir.


3. RLG INS (Halka Lazer Jiroskop Tabanlı INS)
RLG INS, açısal hızı son derece yüksek hassasiyetle tespit etmek için kapalı devre bir boşlukta lazer girişimini kullanır. Bu mimari, stratejik düzeyde doğruluk sağlar ve genellikle mutlak atalet performansının kritik olduğu sistemlerde kullanılır.
| INS Türü | Avantajlar | Sınırlamalar | Tipik Kullanım Senaryoları |
|---|---|---|---|
| MEMS INS |
|
| İHA'lar, robotik, giyilebilir sistemler, gezici mühimmat |
| SİS GİBİ |
|
| Havacılık ve uzay platformları, savunma araçları, deniz sistemleri |
| RLG INS |
|
| Balistik füzeler, uzay araçları, yüksek teknoloji ürünü uçaklar |
INS nasıl çalışır?
Bir INS'yi yapılandırırken, her zaman başlangıç konumunu, hızını ve yönünü tanımlayarak başlarım. Bundan sonra, sistem her bir sonraki hareket durumunu gerçek zamanlı olarak tahmin etmek için yalnızca atalet ölçümlerine güvenir.
1. İvme Ölçümü
Sistem, üç yönde doğrusal ivmeyi ölçmek için üç eksenli ivmeölçerler kullanır. Bu değerler zaman içinde entegre edilerek hız hesaplanır ve daha sonra konumdaki değişiklikleri hesaplamak için tekrar entegre edilir.
2. Açısal Hız Ölçümü
Jiroskoplar X, Y ve Z eksenleri boyunca açısal hızı ölçer. Bu ölçümler, kuaternion veya Euler açı entegrasyonu yoluyla sistemin yönünü güncellemek için kullanılır.
3. Tahmini Konum Belirleme Prensibi
INS, ölü hesaplama yöntemiyle çalışır; yani mevcut durumu önceki duruma ve sensör girdilerine dayanarak tahmin eder. Bu, GNSS gibi harici referanslara ihtiyaç duymadan navigasyon yapmasına olanak tanır.
4. Hata Birikimi ve Sapma
Gürültülü sensör verilerini entegre ettiği için, küçük sapmalar ve hatalar (örneğin, sapma kararsızlığı, ölçek faktörü hatası) zamanla birikerek hem konumda hem de yönelimde kaymaya yol açar.
5. Sensör Füzyonu ve Yardımcı Girişler
Sapmayı en aza indirmek için INS genellikle GNSS, Doppler Hız Kayıtları (DVL), barometreler veya manyetometreler gibi harici sensörlerle birlikte kullanılır. Bu yardımcı kaynaklar biriken hataları düzeltir ve operasyonel doğruluğu artırır.
Bu mimari, INS'nin harici sinyallerin sınırlı, kesintiye uğramış veya tamamen kullanılamaz olduğu ortamlarda (örneğin yüksek dinamikler veya elektromanyetik girişim sırasında) gerçek zamanlı, otonom navigasyon sağlamasına olanak tanır.
Bir INS'nin Kalitesini Hangi Performans Ölçütleri Belirler?
Ataletsel Navigasyon Sistemi seçerken, görev gereksinimlerini karşıladığından emin olmak için temel performans parametrelerini anlamak çok önemlidir. Aşağıdaki ölçütler en kritik olanlardır:
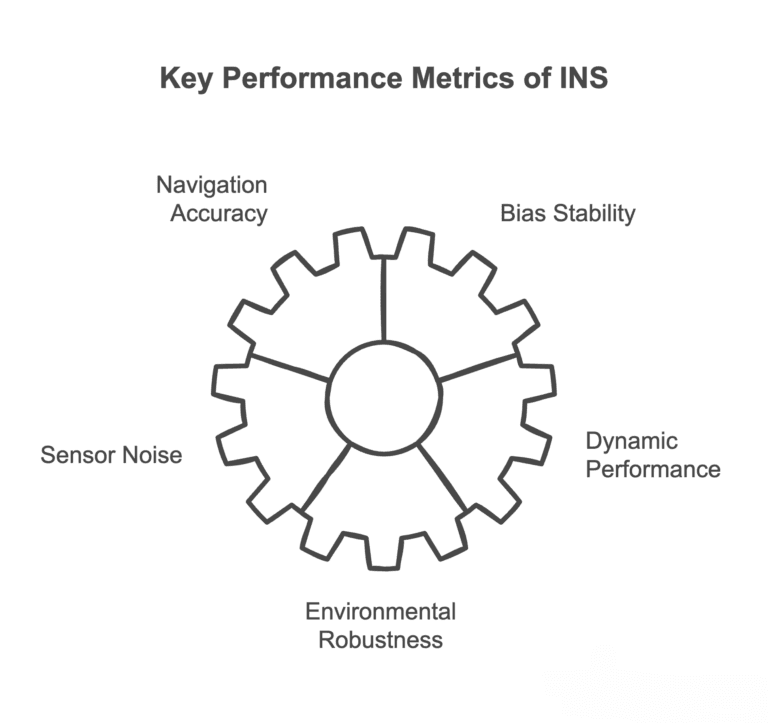
1. Navigasyon Doğruluğu
INS doğruluğu, zamanla biriken konum, hız ve yönelim hatalarını içerir. GNSS'nin bulunmadığı ortamlardaki operasyonlar için yüksek hassasiyet çok önemlidir. Örneğin, Guidenav GFS120A, 0,01° (1σ) yön doğruluğu , 0,005° (1σ) yalpa/eğim doğruluğu ve 0,02 m/s kadar düşük hız hatasıyla < 2 cm + 1 ppm RTK seviyesinde konumlandırma .
2. Sapma Kararlılığı
Sapma kararlılığı, jiroskopların ve ivmeölçerlerin uzun vadeli sapmasını yansıtır ve bu da navigasyon dayanıklılığını doğrudan etkiler. Guidenav GFS120A, 0,003°/saat jiroskop sapma kararlılığına ve 20 μg'nin altında ivmeölçer sapma kararlılığına , yüksek hassasiyetli ve uzun süreli otonom uygulamalar için uygundur.
3. Sensör Gürültüsü (Rastgele Yürüyüş)
Rastgele yürüyüş, kısa vadeli sensör gürültüsünü ölçer. Daha düşük ARW ve VRW değerleri, hareket sırasında daha temiz ve daha istikrarlı veriler anlamına gelir.
4. Dinamik Performans
Güncelleme hızı, gecikme süresi ve bant genişliği, INS'nin harekete ne kadar hızlı yanıt verdiğini belirler. Yüksek dinamik performans, İHA'lar, robotik sistemler ve füzeler için kritik öneme sahiptir.
5. Çevresel Dayanıklılık
INS, titreşime, darbelere ve aşırı sıcaklık değişimlerine dayanmalıdır. MIL-STD veya DO-160 standartlarına uygunluk, zorlu koşullarda güvenilirliği sağlar.
Bu ölçütleri anlamak ve karşılaştırmak, entegratörlerin maliyet, hassasiyet ve çevresel gereksinimleri dengeleyerek platformları için uygun INS'yi seçmelerine olanak tanır.
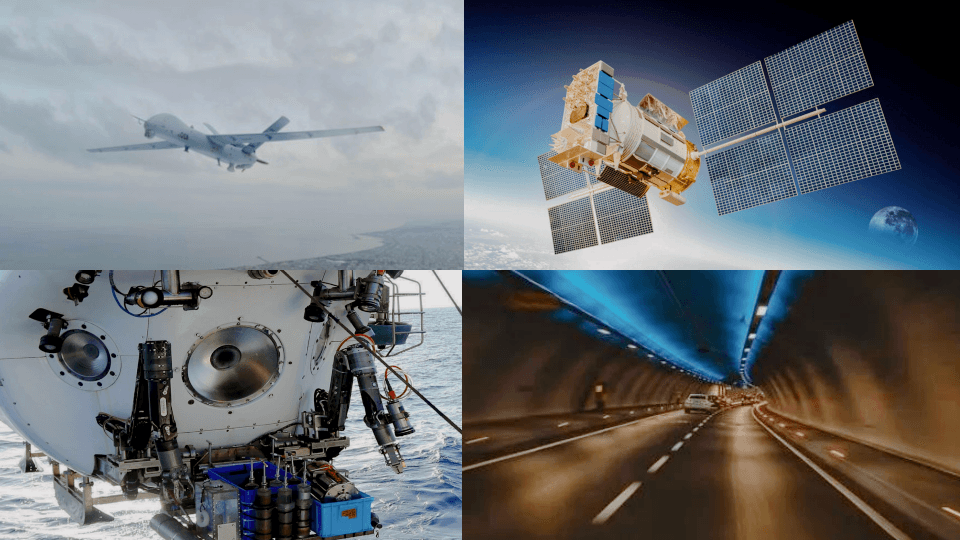
INS'nin Çeşitli Sektörlerdeki Tipik Uygulama Alanları Nelerdir?
Ataletli Navigasyon Sistemleri (INS), sürekli ve sinyalden bağımsız navigasyonun kritik olduğu havacılık, denizcilik, savunma, insansız sistemler, endüstriyel otomasyon ve yer altı endüstrilerinde yaygın olarak kullanılmaktadır. Havacılıkta, hassas uçak ve füze güdümünü mümkün kılarlar; denizcilik uygulamalarında, GNSS'nin bulunmadığı denizaltıları ve otonom su altı araçlarını desteklerler. Savunma sistemleri, GPS'in bulunmadığı ortamlarda hedefleme, ateş kontrolü ve navigasyon için INS'ye güvenir. İHA'lar, İHA'lar ve İHA'lar gibi insansız platformlar, gerçek zamanlı konumlandırma ve sensör füzyonu için INS kullanır. Endüstriyel robotikte, INS, otomatik yönlendirmeli araçlar ve vinçler için doğru hareket kontrolü sağlar. Madencilik ve tünelcilikte, INS, ağır makineler ve sondaj sistemleri için güvenilir yer altı konumlandırması sağlar.
GuideNav Ataletli Navigasyon Sektöründe Nasıl Öncülük Ediyor?
15 yılı aşkın uzmanlığıyla GuideNav dünya çapında savunma, havacılık ve otonom sistem entegratörleri tarafından güvenilen yüksek performanslı ataletsel navigasyon çözümleri sunmaktadır.
Çeşitli Ürün Yelpazesi
İnsansız hava araçları için kompakt MEMS INS sistemlerinden, denizcilik ve havacılık için yüksek hassasiyetli FOG INS sistemlerine kadar GuideNav, çok çeşitli görev profillerini kapsar.
SWaP-C için optimize edilmiştir
Tüm sistemler boyut, ağırlık, güç ve maliyet verimliliği göz önünde bulundurularak tasarlanmıştır; bu da onları mobil, gömülü ve taktik platformlar için ideal hale getirir.
Hibrit Entegrasyona Hazır
INS platformlarımız, standart arayüzler (UART, CAN, Ethernet) aracılığıyla GNSS, DVL ve diğer yardımcı sensörlerle sorunsuz entegrasyonu destekler.
Sağlam ve Sahada Kanıtlanmış
MIL-STD-810H standardına uygun olarak tasarlanan GuideNav üniteleri, darbelere ve titreşimlere karşı dayanıklıdır ve zorlu ortamlarda güvenilir bir şekilde çalışır.
GuideNav, zorlu savunma, havacılık ve otonom uygulamalar için yüksek hassasiyet, operasyonel sağlamlık ve tam ihracat uyumluluğunu bir araya getiren gelişmiş Ataletli Navigasyon Sistemleri (INS) arayan entegratörler için tercih edilen ortaktır.